Caractéristiques des moteurs CC | Caractéristiques du moteur de shunt:
La puissance du moteur CC réside dans sa polyvalence et sa facilité avec lesquelles une variété de caractéristiques de vitesse-couple peut être obtenue, et la large gamme de contrôle de vitesse qui est possible sans avoir besoin de schémas de contrôle élaborés tandis qu’un niveau élevé d’efficacité opérationnelle est maintenu.
Cc moteur – moteur dc
Dans un générateur de de la vitesse, la vitesse est fixée par le moteur de premier ordre et reste presque constante dans toute la partie opérationnelle des caractéristiques des moteurs à courant continu, tandis que les conditions de champ sont ajustées pour donner la tension de borne souhaitée à une charge donnée.
Dans un moteur, en revanche, le besoin est de faire correspondre les caractéristiques de vitesse-Torque des moteurs à courant continu de la charge et d’exécuter la charge à une vitesse ou des vitesses spécifiées par ajustement du champ et par ajustement de la tension d’armature dans le cas où un contrôle de vitesse sur une large plage est souhaité.
Les relations fondamentales EMF et le couple des équations sont reproduites ci-dessous:

En opération automobile, il est pratique d’exprimer ces relations sous forme de vitesse et de couple d’armature, c’est-à-dire

Il est observé que l’EA est régie par l’équation du circuit d’armature
![]()
et le flux / pôle φ est déterminé par l’excitation équivalente

et la caractéristique de l’aimantation de la machine avec la prévoyance que la réaction d’inhabituel entraînera une réduction du flux / pôle.
Les moteurs DC sont de trois types selon la façon dont ceux-ci sont excités. Dans un moteur, l’excitation de shunt ne dépend pas de la FME induite par l’interriscence et est indépendamment régie par la tension d’alimentation.
À cet égard, l’excitation de shunt du moteur se comporte plus comme une excitation séparée et non comme l’auto-excitation comme dans un générateur excité de shunt.
Caractéristiques du moteur de shunt:
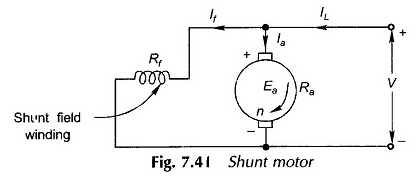
La figure 7.41 montre le schéma de connexion d’un moteur de shunt. Son fonctionnement avec une tension de borne fixe et une résistance à champ fixe, c’est-à-dire avec un courant de champ de shunt constant, sera désormais envisagé.
Sur le circuit d’inhabituel Ea = V – Lara (7,52)
qui, lors de la substitution dans Eq. (7.48) donne

Les équations (7,53) et (7,54) donnent la variation de la vitesse du moteur avec le courant d’armature et avec le couple comme tracé sur les Fig. 7.42 (a) et (b). Ces caractéristiques peuvent également être tracées par rapport au courant de ligne en ajoutant simplement le courant de champ (il = ia + if).
Il résulte de l’équation. (7.53) Cette vitesse tombera en raison de la chute de résistance d’armature iara, mais celle-ci est contrée par une diminution de φ causée par la réaction de l’armature. Étant donné que l’effet IARA prédomine, la vitesse tombe quelque peu avec la charge comme le montre la figure 7.42 (a). Selon l’équation.
(7.54), mais pour l’effet démagnétisant du courant d’armature, la caractéristique T-IA serait légèrement en pente vers le bas. La caractéristique réelle du couple est un peu plus élevée et se plie vers l’intérieur en raison de la réduction du flux / pôle comme le montre la figure 7.42 (a).
Éliminant l’IA entre les équations (7,53) et (7,54) la caractéristique de vitesse-couple

ce qui serait une ligne droite mais pour la réduction de φ causée par la réaction d’armature. La caractéristique réelle est tracée sur la figure 7.42 (b). La vitesse tombe de
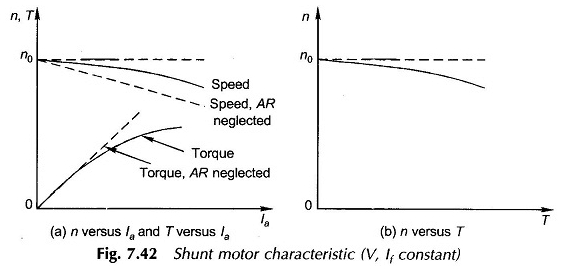
sans chargement à pleine charge de quelques pour cent; En fait, la vitesse reste sensiblement constante. Une telle caractéristique est connue sous le nom de caractéristique du «shunt». Une classe importante de la machine AC, appelée moteur à induction, possède également une caractéristique similaire (NT).