Beginn der DC -Motoren:
Zum Zeitpunkt des Starts der DC -Motoren (n = 0) induziert der EMF einen Motor Null, so dass der Strom aus der Nennspannungsleistung entnommen wird 
Dc motor erklärung (dc motor funktionsweise, dc-motor erklärung)
Für einen Shunt -Motor. Der Widerstand der Serie der Serie würde im Nenner eines Standardmotors enthalten sein. Bei großen Motoren kann der Rahmenwiderstand 0,01 pU oder weniger betragen; Selbst für niedrigere KW -Motoren variiert es zwischen 0,0625 und 0,125.
Somit kann der Verstärkungsstrom im vollen Spannungsstart der CC -Motoren mehrmals (etwa 100 -mal für große Motoren) der Nennwert erfolgen.
Aus mehreren nachstehend erwähnten Gründen kann ein so wichtiger Strom auch für die kurze Startperiode nicht in einem Motor zirkulieren.
- Dies würde einen unerträglich schweren Funken für die Bürsten verursachen, die den Schalter und die Beule zerstören könnten.
- Die plötzliche Entwicklung eines großen Paares führt zu mechanischer Schock am Baum und verringert seine Lebensdauer.
- Ein so schwerer Strom kann im Allgemeinen nicht aus der Stromquelle gezogen werden.
Aus den oben genannten Gründen müssen alle Motoren mit Ausnahme kleiner fraktionaler KW -Motoren mit einem externen Widerstand gestartet werden, der im Verstärkungskreis enthalten ist, um den Startstrom auf sichere Werte zu beschränken. Wenn beispielsweise die variable Spannungs -CC -Stromversorgung verfügbar ist
Im Ward-Leonard-Geschwindigkeitskontrollschema kann dies verwendet werden, um den Motor zu starten, und es wäre kein Startwiderstand erforderlich.
Ein Punkt zugunsten von Direktstart -up muss hier erwähnt werden. Da das Motordrehmoment mit direktem Starter viel höher ist, beginnt der Motor viel schneller. Infolgedessen ist der Joule -Eingang durch Start viel niedriger als der mit dem Beginn des Widerstands. Dies wäre nützlich bei wiederholten Start – sparen Sie Energie und verursachen einen weniger Temperaturanstieg.
Der maximal autorisierte Start -up -Strom beträgt nicht mehr als 1,5 bis 2,0, wenn der Nominalwert. Diese Werte sind sicher und ermöglichen dennoch ein hohes Startdrehmoment gleichzeitig für die schnelle Beschleunigung des Motors. Wenn eine variable Spannungsleistung für die Geschwindigkeitsregelung verfügbar ist, ist das Starten überhaupt kein Problem.
Zu Beginn des Shunt -Motors muss das Shunt -Feld zuerst so sein, dass der reguläre Feldstrom bereits vor dem Rahmen mit einem Startwiderstand in der Schaltung für die Stromversorgung aktiviert wird.
In der Tat hat das Shunt -Feld eine hohe Induktivität und ein Strom durch sie (und der Fluss der Maschine) wird langsam konstruiert, was während der Anfangszeit des transienten Shunt zu einem Drehmoment mit niedrigem Start -up -Drehmoment führt, wenn das Feld und der Rahmen gleichzeitig aktiviert werden.
Darüber hinaus muss der gesamte Widerstand des Reglers im Shunt -Feldkreis vollständig geschnitten werden, um einen hohen Feldstrom und damit ein hohem Startdrehmoment zu erzeugen.
Der Beginn des Widerstands der DC -Motoren ist in Phasen angeordnet und wird allmählich geschnitten, wenn der Motor während des Start -up ein hohes durchschnittliches Drehmoment aufrechterhält.
Das Verbindungsdiagramm eines manuellen Frontplattenstarters eines Shunt -CC -Motors ist in Abbildung 7.50 dargestellt. Der Startgriff ist in seiner Position in Position angegeben – der Startwiderstand wird geschnitten, der im Feldkreis enthalten ist.
Zwei Schutzgeräte in einem CC -Motorstarter:
- NVC (keine Volt-Spule): Im Falle eines Feldstromausfalls (aufgrund eines zufälligen oder anderweitigen offenen Stromkreises) setzt diese Spule den Griff (elektromanneti) frei, der unter der Federwirkung auf die deaktivierte Position zurückreicht.
- OL (Over-Last) Befreiung: Kontakt dieses Relais im Strom der Verstärkung über einem bestimmten Wert (auf Last / Kurzschluss) Die NVC endet und macht den Griff erneut in der Position.
Die Praxis von Modem besteht darin, einen automatischen Schalttyp in Branchen zu verwenden.
Automatische Starter erfüllen hauptsächlich die gleichen Funktionen wie manuell mit elektromagnetischen Relais, die Kurzschlussabschnitte von robusten Metallstartwiderstandsabschnitten entweder in einer vorbestimmten Zeitsequenz oder wenn der Verstärkungsstrom auf einen voreingestellten Wert fiel.
Eine solche Anordnung ist in Abbildung 7.51 dargestellt. Die meisten automatischen Starter verkörpern zusätzliche Steuerungs- und Sicherheitsfunktionen.

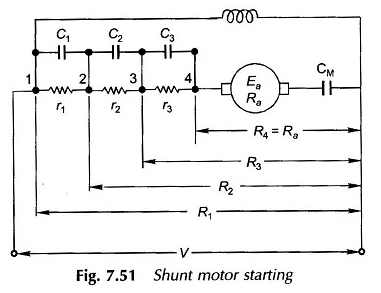
Berechnung des Starters für den Shunt CC -Motor:
In Abbildung 7.51 sehen wir, dass der Moment, in dem der Starter in den Bolzen 1 oder den CM -Schütz geschlossen ist 
Anschließend nimmt der Stromwert ab, wenn sich der Motor beschleunigt und seine Rückwärts steigt, wie in Abbildung 7.52 gezeigt. Der Strom ist berechtigt, auf i2 zu reduzieren, die niedrigere Stromgrenze, gegeben durch 
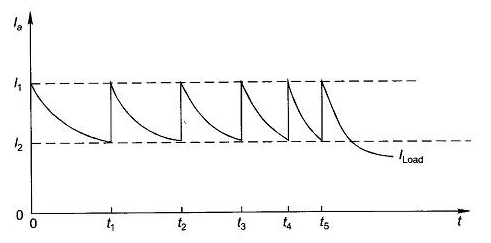
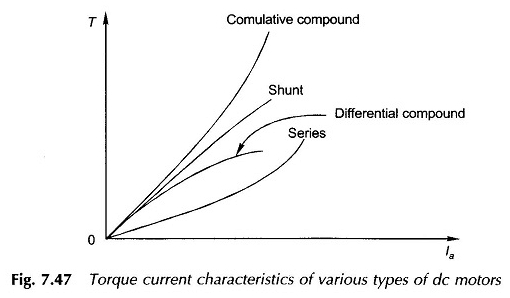
wobei EA (N1) die hintere EMK mit der Geschwindigkeit ist, die vom Motor erreicht wird. In diesem Moment wird der Starter in den Bolzen 2 verschoben oder der C1 -Schütz geschlossen. Der Strom steigt sofort auf i1 an, wie in Abbildung 7.47 gezeigt und erfüllt die Beziehung

Gleichungen. (7.63) AD (7.64),

Durch Induktion, für einen Starter k -stud ((k – 1) externer Widerstand),

Es folgt sofort aus der Gleichung. (7.66) das

In Abbildung 7.51 ist es offensichtlich, dass 

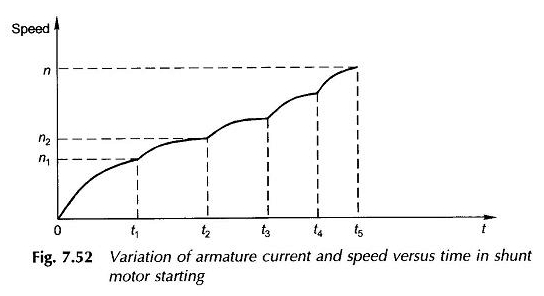
Abbildung 7.52 zeigt das Layout des Verstärkungsstroms und der Geschwindigkeit als Funktion der Zeit, da der Widerstand gegen den Starter durch Stufen geschnitten wird. Während der Wartezeit in jeder Phase fällt der Strom und die Geschwindigkeit steigt exponentiell nach einer einzigen dominanten konstanten Dominant an.
Dies ist der Grund, warum sich die Wartezeit bei jedem Schritt allmählich reduziert, so wie es leicht zeigt, Abbildung 7.52.
Sobald der Designer während der Start -up die oberen und unteren Grenzen der Verstärkungsströme ausgewählt hat, können Starterschritte in den folgenden Linien erfolgen:
- Der Gleichung. (7.62) R1 berechnen.
- Der Gleichung. (7.69) Berechnen Sie die Anzahl der Schritte k. Wählen Sie den nächsten Vollwert.
- Berechnen Sie die Widerstände R1, R2… aus der Gleichung. (7.66). Aus diesen können die Widerstandswerte verschiedener Abschnitte des Starts der kontinuierlichen Strommotoren gefunden werden.
Manchmal wird zusätzlich zur oberen Stromgrenze die Anzahl der Abschnitte angegeben. Dieses Problem kann durch eine etwas andere Manipulation von Gl. (7.62) bis (7.69) behandelt werden.