CC -Motorfahrten ohne Besen (Trapez -PMAC):
Der Querschnitt eines Gleichstrommotors mit 2 2 Polen mit 2 Polen ist in Abbildung 7.15 dargestellt. Er hat einen dauerhaften, liebevollen Rotor mit einem breiten Stangenbogen. Der Stator hat drei konzentrierte Phasenwicklungen, die um 120 ° bewegt werden und jede Phasenwicklung über 60 ° auf jeder Seite erstreckt.
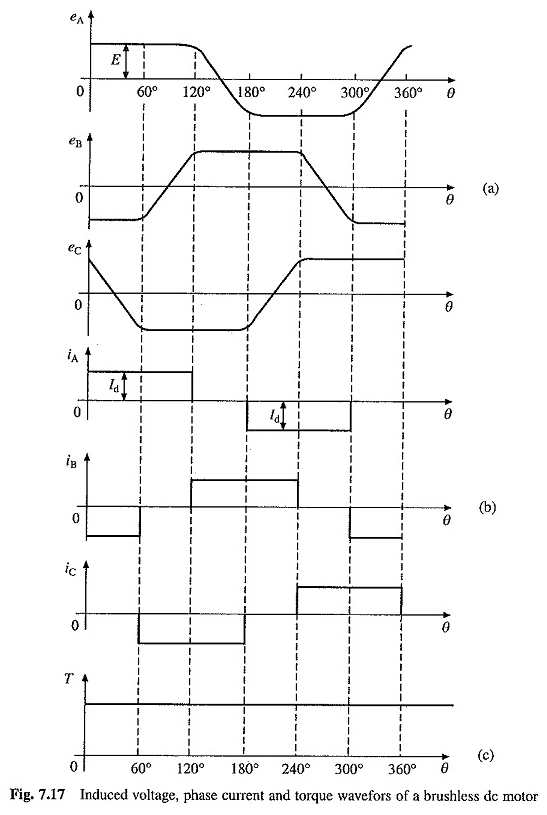
Die in drei Phasen induzierten Spannungen sind in Abbildung 7.17 (a) dargestellt. Der Grund für die Erlangung von Trapezwellenformen kann nun erklärt werden. Wenn Sie sich in den antihorösen Sinne in Richtung drehen, bis zu 120 ° Rotation der in Abb. 1 dargestellten Position.
7.15, alle oberen Treiber der Phase verbinden den Südpol und alle unteren Treiber der Phase, um den Nordpol zu verbinden. Folglich ist die in Phase A induzierte Spannung während der Rotation von 120 ° gleich (Abb. 7.17 (a).

Abgesehen von 120 ° sind einige Fahrer im Nordpol des oberen Gliedes und andere am Südpol. Das gleiche passiert mit den unteren Treibern. Infolgedessen hat die in der Phase induzierte Spannung in der Rotation der folgenden 60 ° linear linear. Der Rest der Wellenform der Phase A und der Wavelems der B- und C -Phasen kann auf die gleiche Weise erklärt werden.


Ein Trapez-PMAC-Motor, der in einem im selbst kontrollierten Modus arbeitenden Wechselrichter genährt wird, wird ohne Bürsten als CC-Motor bezeichnet.

Motor DC ohne Besen für Servoanwendungen:
Ein kurzer DC -Motor mit einem Spannungsquellen -Wechselrichter (VSI) und einem Trapez -PMAC -Motor ist in Abbildung 7.16 (a) dargestellt.
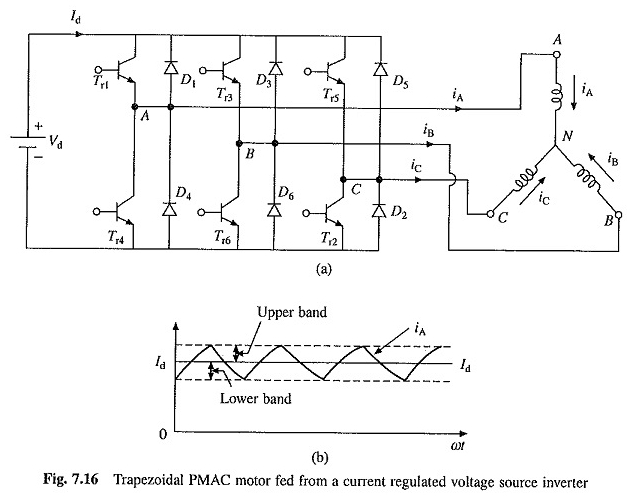
Die Statorwicklungen sind mit den Sternen verbunden. Er wird Rotorpositionssensoren haben, die in der Abbildung nicht dargestellt sind. Die Phasenspannungswellenwellen für einen Trapez -PMAC -Motor sind in Abbildung 7.17 (a) dargestellt. Dass die Statorwicklungen mit Stromimpulsen gefüttert werden, die in Abbildung 7.17 (b) dargestellt werden.
Die Stromimpulse sind jeweils 120 ° und befinden sich in dem Bereich, in dem die induzierte Spannung konstant und maximal ist. Zusätzlich ist die Polarität von Stromimpulsen die gleiche wie die induzierte Spannung. Da der Luftvergussstrom konstant ist, ist die induzierte Spannung proportional zur Geschwindigkeit des Rotors.
![]()
Während jedes Intervalls von 60 ° in Abbildung 7.17, dem Strom zwischen einer Phase und aus einer anderen Phase, ist die Stromversorgung des Motors in jedem dieser Intervalle daher aus ![]()
Drehmoment vom Motor entwickelt

Die Wellenform des Paares ist in Abbildung 7.17 (c) angegeben. Nach Gl. (7.31) Das Paar ist proportional zur aktuellen ID. Sie können anzeigen, dass eine CC -aktuelle ID im CC -Link zirkuliert. Der regenerative Bremsvorgang wird durch Umkehrungsphasenströme erhalten.
Dies wird auch die Quell aktuelle ID umkehren. Jetzt geht die Leistung von der Maschine zum Wechselrichter und dem Wechselrichter an der DC -Quelle. Wenn die Geschwindigkeit umgekehrt ist, wird die Polarität der induzierten Spannungen umgekehrt. Mit der in Abb. 1 dargestellten Strompolarität.
7.17 gibt der Leser einen regenerativen Bremsvorgang an, und wenn die Stromrichtung umgekehrt ist, wird der Betrieb des Automobils erhalten. Die in Abbildung 7.17 (b) gezeigten Stromwellenformen werden wie folgt erzeugt.
In der Zeit 0∘ bis 60∘ ist IA = ID und IB = –ID. Die aktuelle KI zwischen Phase A und Anteil über Phase B B, wenn die Transistoren der TR1- und TR6 -Transistoren sind, die Terminals A und B mit den positiven und negativen Klemmen der Quelle DC zusammenhängen.
Ein Strom zirkuliert über den Pfad aus VD, TR1, Phase A, Phase B und TR6, und die aktuelle Änderungsrate IA ist positiv. Wenn TR1 und TR6 deaktiviert sind, zirkuliert dieser Strom durch einen Pfad aus Phase A, Phase B, Diode D3, VD und Diode D4.
Da der Strom gegen die VD -Spannung zirkulieren muss, ist die IA -Variationsrate negativ. Somit kann durch Aktivieren und Löschen der TR1- und TR6 -Phase abwechselnd der Strom A durchgeführt werden, um der Referenzstrom -ID in einer Hysteresebande zu folgen, wie in Abbildung 7.16 (b) gezeigt. Durch die Verringerung der Bande kann fast ein CC -Strom des gewünschten Wertes erzeugt werden.
Die Operation für andere 60 ° -Intervalle kann auf die gleiche Weise erklärt werden. Um die Leistungsimpulse im Vergleich zu den induzierten Spannungen oder der Identifizierung dieser sechzig Intervalle ordnungsgemäß zu platzieren, werden Signale durch Rotorpositionssensoren erzeugt.
In den sechs Winkelpositionen des Rotors sollten durch den Zyklus der induzierten Spannung nachgewiesen werden. Hall -Effekt -Sensoren können die Größe und Richtung eines Magnetfeldes erkennen. Daher können drei Raumeffekte die sechs Positionen des Rotors erkennen.
Die Sensoren sind 60 ° elektrisches Intervall montiert und angemessen mit der Wicklung des Stators ausgerichtet. Optische Sensoren sind ebenfalls verfügbar. Die mit dem Trapez -PMAC -Motor verwendeten Sensoren sind billiger als diejenigen, die mit dem Sinus -PMAC -Motor erforderlich sind.
Da der Trapezmotor auch billiger ist, hat der Leser viel geringere Kosten. Obwohl die dynamische Reaktion vergleichbar ist, ist Drehmomentwelligkeit in diesem Leser erheblich höher.
Die Drehmomentwelle wird durch die induzierte Spannung verursacht, dass die Spannung nicht genau Trapez und Unfähigkeit der Wechselrichter zur Erzeugung rechteckiger Stromwellenwellen ist.
Der Trapez -PMAC -Player wird im Servo -Training häufig verwendet, außer bei Hochleistungs -Scheiben, bei denen der PMAC -Sinusoid -Engine -Player bevorzugt wird.
Es gibt eine große Anzahl von Ähnlichkeiten zwischen dem mit dem Wechselrichter gefütterten Trapez -PMAC -Motor und einem DC -Motor. Als kontinuierlicher Strommotor ist die induzierte Spannung proportional zur Geschwindigkeit [Gl. (7.30)] ist das Drehmoment proportional zum Bewehrungsstrom [Gl.
(7.31)] und die Stator- und Rotorfelder bleiben im Vergleich zueinander stationär. Es gibt jedoch keine assoziierten Bürsten und Nachteile, sodass der mit dem Wechselrichter gefütterte Trapez -PMAC -Motor allgemein als Besen CC -Motor bekannt ist.
Dieser Motor ist auch als elektronisch geschalteter Gleichstrommotor ausgelegt, da der Wechselrichter hier die gleiche Funktion wie die Bürsten und der Schalter in einem Gleichstrommotor erfüllt
Um die Ströme zwischen den Rahmenfahrern zu bewegen, um den Stator und die stationären Rotorfelder (und in der Quadratur) im Vergleich zueinander zu halten.
CC -Motor fährt ohne niedrige Besen:
Einer der wichtigsten Punkte in Bezug auf CC -freie CC Engine -Leser ist nur durch Integration des Konverters / Wechselrichters mit Motor. Der Leser wird erheblich vereinfacht, was zu einer einfacheren Kontrolle und einer erheblichen Kostensenkung führt.
Während dreiphasige Maschinen in Mehrheitsanwendungen verwendet werden, werden auch Einzelphasen -Maschinen und vier Phasen verwendet. Ebenso wird eine Vielzahl von Konvertern / Wechselrichtern verwendet.
Die Motoren werden durch Stromimpulse und auch durch Spannungsimpulse mit einer Stromgrenze angetrieben, um sicherzustellen, dass der Strom die Abmessungen des Wandlers und des Motors nicht überschreitet. Zwei dieser Leser werden unten beschrieben.

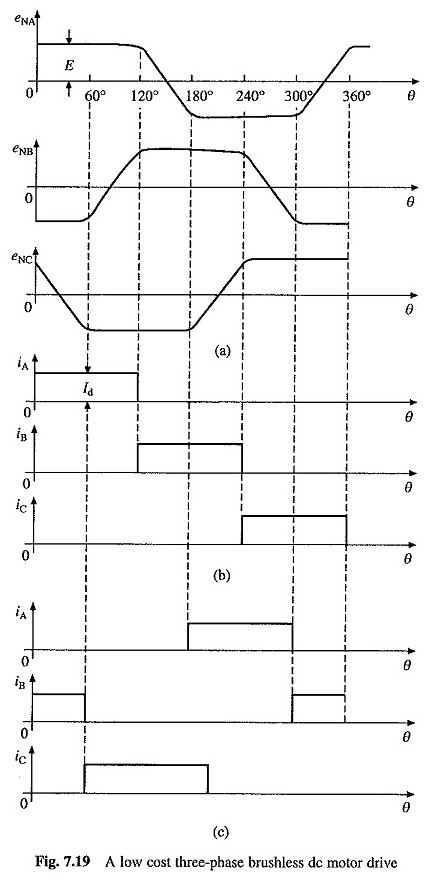
Ein kostengünstiger Antrieb mit einem dreiphasigen Trapez -PMAC -Motor ist in Abbildung 7.18 dargestellt. Es verwendet nur drei Transistoren und drei Diodenkonverter, die nur positive Ströme oder Spannungen mit drei Motorphasen liefern können.
Die induzierten Spannungen und der Strom für Automobilisierung und Bremsvorgänge sind in Abbildung 7.19 dargestellt. Wenn dem Motor positive Leistungsimpulse bei 120 ° wie in Abbildung 7.19 (b) angegeben sind, wird der Betrieb des Antriebs in der antihorösen Richtung erhalten.
Wenn diese Impulse um 180 ° ausgeglichen werden, wie in Abbildung 7.19 (c) gezeigt, wird der Bremsvorgang erhalten. Automobilisierung und Bremsvorgänge für die Rotation in der Zeitrichtung werden durch Synchronisierungsimpulse wie in Abbildung 7.19 (c) bzw. (b) angegeben. Jede Phase wird hauptsächlich von einem Hubschrauber versorgt.
Der NA -Phasenstrom wird durch TR1 und D1 gesteuert. Wenn TR1 auf der Quelle ist, ist die VD durch die Na -Wicklung verbunden und die AI -Variationsrate ist positiv. Wenn TR1 deaktiviert ist, sind die Strom -IA -Räder durch Diode D1 und die AI -Variationsrate negativ.
Daher kann während des Zeitraums von 0 ° bis 120 ° TR1 abwechselnd aktiviert und deaktiviert werden, so dass der IA -Strom ein rechteckiger Referenzstrom i * in einem Hysteresestreifen folgt.
Im Vergleich zum Leser in Abbildung 7.16 wird das von diesem Leser für einen bestimmten ID -Wert erzeugte Drehmoment die Hälfte sein, was eine langsamere dynamische Reaktion ergibt. Der Leser hat auch eine höhere Drehmomentwelle.
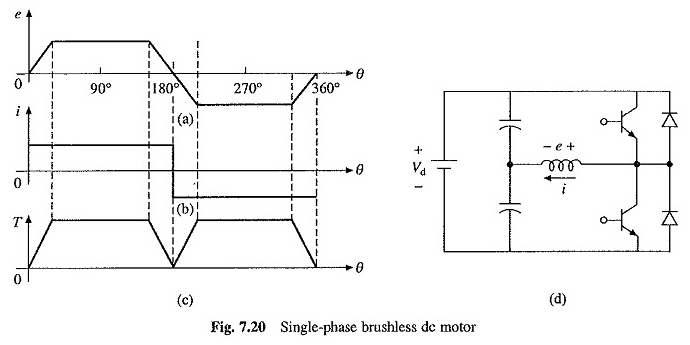
Untersuchen wir auch das einstaatliche motorische Training mit einer einphasigem, eingehenden aktuellen motorischen Schulung. Der Motor hat in Abbildung 7.15 einen breiten Pol und eine einzelne konzentrierte Phasenwicklung mit einer Ausbreitung von 60 ° auf jeder Seite angegeben.
Sei θ aus dem Moment, in dem die Achse der Phase mit der Achse des Rotorpfostens zusammenfällt, und die in der Phasenwicklung induzierte Spannung hat die Wellenform, wie in Abbildung 7.20 gezeigt. Oder der Motor, der von einem einphasigen Wandler der in Abb. 1 dargestellten Halbponton bereitgestellt wird.
7.20 (d) mit einer Form der in Abbildung 7.20 (6) gezeigten Form einer rechteckigen Stromwelle. Anschließend hat das vom Motor erzeugte Drehmoment eine in Abbildung 7.20 (c) dargestellte Wellenform.
Obwohl das Drehmoment eine große Welligkeit hat, werden Drehmomentwellen, wenn er mit hoher Geschwindigkeit arbeitet, von der Trägheit des Motorlastsystems gefiltert, was eine gleichmäßige Geschwindigkeit ergibt.
Wichtige Merkmale und Anwendungen:
Aufgrund des Fehlens von Bürsten und Schalter hat das motorfreie, leistungsfreie Motortraining im Vergleich zu herkömmlichen CC -Motoren eine Reihe von Vorteilen.
Sie erfordern praktisch keine Wartung, haben eine lange Lebensdauer, eine hohe Zuverlässigkeit, niedrige Trägheit und Reibung sowie eine niedrige Hochfrequenz -Interferenz und Rauschen.
Aufgrund von niedriger Trägheit und Reibung haben sie eine schnellere Beschleunigung und können mit viel höheren Geschwindigkeiten ausgeführt werden – bis zu 100.000 U / min und sind häufiger. Da sich die Verstärkungswicklungen auf dem Stator befinden, ist die Kühlung viel besser, das heißt, dass bestimmte höhere Ausflüge erhalten werden können.
Diese Motoren haben eine hohe Effizienz von über 75%, während die Feldmotoren von Niedrigstrombewertungen eine viel geringere Effizienz aufweisen. Die Nachteile im Vergleich zu herkömmlichen CC -Motoren sind hohe Kosten und ein niedriges Startdrehmoment. Die Größe eines Balais -CC -Motors entspricht fast dem herkömmlichen CC -Motor.
CC -freie CC -Engine -Leser finden Anwendungen, die als Tabellenleser in Aufzeichnungslesern, den Bandleser für Video -Rekorder, Spitters in Festplatten für Computer und Low -Cost- und Low -Power -Discs in Computerperipheriegeräten, Instrumenten und Steuerungssystemen finden.
Sie haben auch Anwendungen in den Bereichen Luft- und Raumfahrt, beispielsweise Gyroskopmotoren und biomedizinische kryogene Kühler und künstliche Herzpumpen. Sie werden auch verwendet, um Kühlventilatoren für elektronische Schaltkreise und Wärmedissipatoren zu fahren.