Kontaktmotorsteuerung durch Konverter an Kontakten:
Die CC -Motorsteuerung wird bequem und effizient von Konvertern zur Steuerungsphase erhalten, in der die CA -Eingangsspannung in einen gesteuerten CC -Ausgang umgewandelt wird.
Der Schaltvorgang, die Übertragung des Stroms von einem Thyristor zum anderen, in diesen Konvertern ist billig natürliches oder lineares Schalten. Wie ein ankommender Thyristor aktiviert ist, macht es das Gegenteil zum ausgehenden Thyristor und löscht ihn.
Daher ist kein zusätzlicher Schaltkreis erforderlich. Die Effizienz der Leistungsumwandlung bei diesen Wandlern beträgt aufgrund relativ geringer Verluste bei Thyristoren größer als 95%.
Diese Konverter werden sowohl bei der Geschwindigkeitskontrolle von CC-Fractionary-KW-Motoren als auch in den großen Motoren verwendet, die bei variablen Geschwindigkeit für Walzen mit motorischen Abmessungen, die so wichtig sind, in den umgekehrten Scheiben verwendet werden, wie mehrere MW.
Bei bestimmten Arten von Konvertern (Halbkonverter) wird eine Diode, die als freie Raddiode bezeichnet wird, an den Motorklemmen angeschlossen, um die Ablassung der in der Induktivität des Motors gespeicherten Energie zu ermöglichen, und um eine Kontinuität des Motors zu ermöglichen, wenn die Thyristoren blockiert sind. Es bietet auch Schutz vor Übergangsüberspannungen.

Single-Halbwellen-Konverter:
Abbildung 11.14 zeigt einen einphasigen Halbwellenwandler, um einen angeregten CC-Motor getrennt zu steuern. Es erfordert einen einzelnen Thyristor und eine freie Raddiode. In dieser Schaltung ist der Motorstrom immer diskontinuierlich, was zu einer schlechten Motorleistung führt.

Diese Art von Konverter wird nur für Motoren mit weniger als 400 W verwendet. Hier wird er nicht ausführlich beschrieben. Diese stammen leicht aus der Beschreibung der Wellenformen (Spannung und Strom) für den Halbkonverter.

Halbkonverter liefert separat einen angeregten CC-Motor:
Es ist ein Wandler eines Quadranten (Abb. 11.15a), der eine Spannung und einen Strom einer Polarität an den CC -Klemmen ergibt. Es sorgt daher nicht für regenerative Bremsung, dh den Stromfluss der Kontrolle des Gleichstrommotors zu Wechselstrom. Wenn keine Regeneration erforderlich ist, wird dieser Konverter aus Gründen der Wirtschaft verwendet.

Abbildung 11.15 (b) ergibt die Schaltungen eines Halbkonverters, das eine angeregte CC-Motorsteuerung separat liefert. Die RA -Verstärkungsresistenz und die Induktivität werden in Reihe dargestellt, wobei ein EMF -EMF durch den Rahmen induziert wird, während die inhessy terminale Spannung ist.
Er hat zwei Thyristors, zwei Dioden und eine freie Diode mit freiem Rad (über die Motorklemmen). Es wird angenommen, dass bei der dauerhaften Funktion der Verstärkungsstrom im gesamten Betriebsbereich kontinuierlich ist.
Typische dauerhafte Leistungswellenwellen sind in Abbildung 11.16 dargestellt. Der Thyristor Th1 wird im Winkel α und Th2 im Winkel π + α im Vergleich zur Versorgungsspannung ν gezeichnet und der Prozess wird kontinuierlich wiederholt.

Unter regelmäßigen Bedingungen ist das Th1- und D2 -Rohr und der Motor an die Stromversorgung angeschlossen, dh νa = ν angeschlossen. Bei ωt = π wird νa tendenziell negativ, wenn sich die Polarität der Eingangspannung ändert.
Dies bedeutet, dass DFW, die Freilaufdiode, nach vorne voreingenommen wird, und der Verstärkungsfluss, der durch Th1D2 fließt, wird auf DFW übertragen, was bedeutet, dass Th1 -Schalter (natürlich).
Die motorischen Terminals werden über DFW für die freie Radperiode π <ωt <π + α kurzfristig verarbeitet, wobei der Verstärkungsstrom während dieser Zeit, in der der Motor von der Stromversorgung getrennt bleibt, eine Kontinuität des Verstärkungsstroms sorgt.
Bei ωt = π + α wird Th2 gezogen und der treibende Th2D1, was bedeutet, dass DFW umgekehrt wird und daher im offenen Stromkreis. Der Motor ist erneut mit der Versorgung der folgenden Periode von π + α <ωt <2π verbunden. Dieser Vorgang wird kontinuierlich wiederholt.
Verschiedene Formen der Spannungs- und Stromwellenwellenwelle einer angeregten CC-Motorregelung, die von einem Halbkonverter getrennt ernährt ist, sind in Abbildung 11.16 dargestellt. Obwohl die Spannung zwischen den motorischen Klemmen (Abb.
11.16 (c)) enthält Harmonische über einen stabilen CC -Wert hinaus. Es wird hier zu Recht angenommen, dass der Motor nicht auf diese Harmonischen reagiert und daher mit konstanter Geschwindigkeit (n) und einer konstanten induzierten Fem (EA) arbeitet. Wenn Th1 ωt = α zeichnet, wird der Motorstrom gegeben

Bis zu Punkt P in Abbildung 11.16 (a); ν> ea so dass der Motorstrom zunimmt. Gleiches gilt für den EMF EA -Motor. In dieser Zeit wird die Energie abgesehen von der Energie, die an die Last geliefert wird, auch in der Induktivität des Motors (der) gespeichert.
Jenseits von Punkt P, ν
Während der freien Radzeit (π <ωt <π + α) wird die Diode durch die Inversion der induktiven Spannung weiterhin verzerrt. Während dieser Zeit wird ein Teil der in der Motorinduktivität gespeicherten Energie verbraucht, um die mechanische Belastung zu fördern.
Der Motorstrom, die Geschwindigkeit und der Fem reduzieren daher alle. Dieser Vorgang wird dann während der folgenden Periode (π + α <ωt <2π + α) über Th2D1 und später über DFW wiederholt. Der Strom, der aus der in Abb.
11.16 (d) ist dieser Teil des Verstärkungsstroms, der über die Zeiträume (α, π), (π + α, 2π) zirkuliert, … wenn der Motor mit der Stromversorgung verbunden ist. Es ist nicht erforderlich, die Diode in einem freien Rad zu verwenden.
In seiner Abwesenheit bei ωt = π wird D1 in gewisser Weise vor dem freien Rad durch Th1D1 bis zum Ziehen des Th2 voreingenommen. Bei ωt = 2π -freies Rad erfolgt durch Th2D2 und so weiter.
Aus Abbildung 11.16 (d) muss die Grundlage des aus dem Sektor gezogenen Stroms durch einen Winkel φ1 (<α) verspätet sind.
Nicht verstärkungsstrom:
Der Verstärkungsstrom wird für die großen Werte des Schießwinkels, der hohen Geschwindigkeit und des niedrigen Drehmomentwerte diskontinuierlich. Die Motorleistung verschlechtert sich mit einem diskontinuierlichen Verstärkungsstrom. Das Spitzenverhältnis zum Durchschnitt und das RMS zu einem durchschnittlichen Verstärkungsstrom steigen.
Es ist daher wünschenswert, den Motor im Gleichstrommodus zu betreiben. Um dies zu erreichen, kann eine Strangulation des externen Verstärkungskreislaufs verwendet werden, wodurch die Abnahme der Stromrate während des freien Radbetriebs verringert wird.
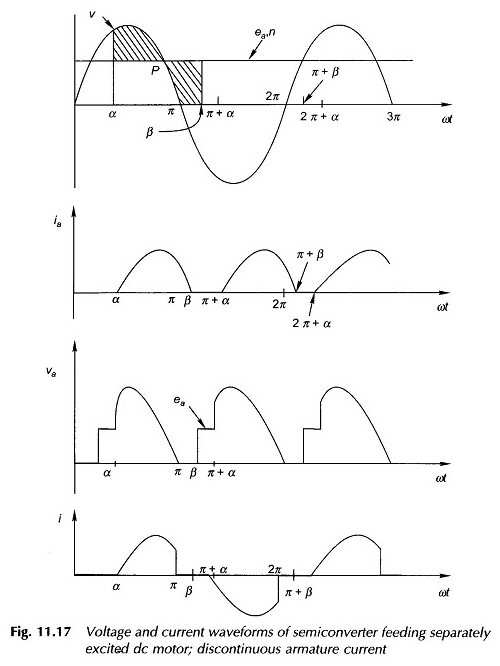
Die Spannung und die Leistungswellenwavelems für Semi-Konverter mit diskontinuierlichem Strom sind in Abbildung 11.17 dargestellt. Der Motor ist für den Zeitraum α <ωt <π über Th1D2 mit der Stromversorgung verbunden. Jenseits π wird der Motor durch die Diodendiode in einem freien Rad kurz abgeschlossen.
Der Verstärkungsstrom löst sich im Winkel β (Extinktionswinkel) π + α auf Null ab, dh vor dem Zeichnen des Thyristor -Th2, wodurch der Strom diskontinuierlicher Verstärkung erzeugt wird. Während α bis π, der Leitungszeit über Th1D2, ist die motorische Klemmespannung der Eingangsspannung gleich.
Während π bis β ist die Spannung des motorischen Anschlusss Null, da die Motorklemmen von der freien Raddiode kurzverkleidet sind. Von β zu π + α ist der Küstenmotor und damit seine Klemmenspannung mit seiner EMF die gleiche.
Komplette Konverter mit einem angeregten CC -Motor separat:

Ein vollständiger Konverter ist ein zwei -quadrierender Wandler (siehe Abb. 11.18 (a)), bei dem die Spannungspolarität des Ausgangs umgekehrt werden kann, der Strom jedoch aufgrund der unidirektionalen Thyristoren unidirektional bleibt.
Ein vollständiger Konverter verwendet vier Thyristoren, aber es ist keine freie Raddiode erforderlich. Ein vollständiger Wandler, der separat eine angeregte CC -Motorsteuerung liefert, ist in Abbildung 11.18 dargestellt. Die Spannung und die Stromwellenwellen sind in Abb. 1 dargestellt.
11.19 Mit der Hypothese, dass der IA -Verstärkungsstrom nahezu konstant ist. Thyristoren Th1 TH3 Blei für das Intervall α <ωt <π + α und verbinden den Motor mit der Stromversorgung. Bei π + α werden die Thyristoren Th2th4 ausgelöst.
Sofort erscheint die Versorgungsspannung bei der entgegengesetzten Tendenz durch Th1 Th3 und löscht sie. Es ist ein natürlicher oder Online -Umschalten. Der Motorstrom wird von Th1 Th3 auf Th2th4 übertragen.
Da es keine Zeit gibt, in der der Motor von der Stromversorgung getrennt ist, ist kein freies Rad erforderlich. Während α bis π fließt die Energie von der Stromversorgung zum Motor (ν und ich sind positiv, genau wie das Gehen und IA).
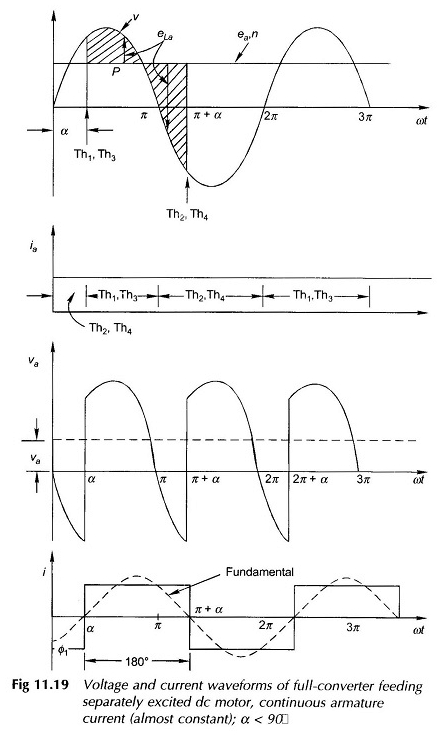
Während π bis π + α wird jedoch ein Teil des Motors des Motors in die Stromversorgung zurückgegeben (V und ich haben eine entgegengesetzte Polarität, genau wie Va et ia, was die Inversion des Leistungsstroms bedeutet). Beachten Sie, dass die Grundfundierung des aus dem Sektor entnommenen Strom hinter der Spannung durch Winkel φ1 = α zurückbleibt.
Die Spannung und die Stromwellenwellen für α> 90 ° sind in Abbildung 11.20 dargestellt. Die durchschnittliche motorische Klemmenspannung ist jetzt negativ. Wenn die motorischen Terminals umgekehrt sind, wirkt sie als Stromversorgung des Generators an Wechselstrom.
Dies ist der Umkehrbetrieb der Konverter und wird in der regenerativen Bremsung des Motors verwendet. Ein Punkt muss hier bezeichnet werden.
Während der Leitungsdauer von Th1th3 oder Th2TH4, wenn die Versorgungsspannung negativ wird, beginnt sich der Verstärkungsstrom zu reduzieren, was das Gegenteil der Induktivitätspolarität verursacht, sodass die leitenden Thyristoren weiterhin nach vorne vorgespannt werden.
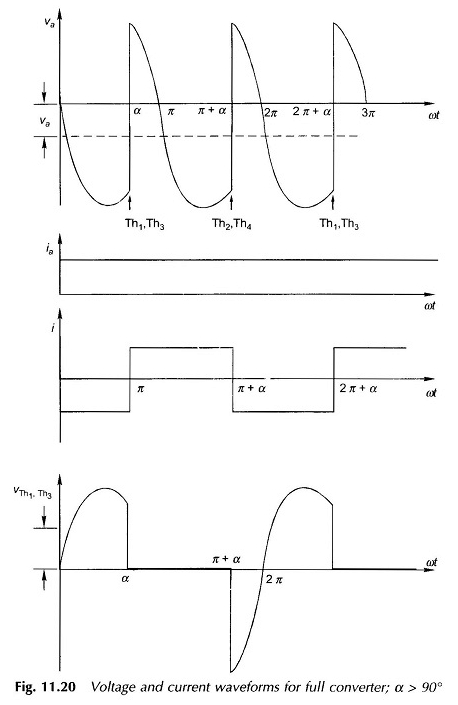
Die Spannungs- und Stromwellenwavelems für den Fall des diskontinuierlichen Verstärkungsstroms können wie im Fall des Halbkonverters gefunden werden. (Siehe Abb. 11.20).
Drehmomentgeschwindigkeitseigenschaften:
Wir nehmen hier an, dass der Verstärkungsstrom kontinuierlich ist. Für einen Halbkonverter mit einer kostenlosen Diodenwirkung mit freien Rädern sind die ungewöhnlichen Schaltungsgleichungen
Für einen separaten Konverter

Sei ν = √2 v sin ωt. Die durchschnittlichen Motorterminalspannungen sind: mit einem Halbkonverter,,

Mit einem vollständigen Konverter,

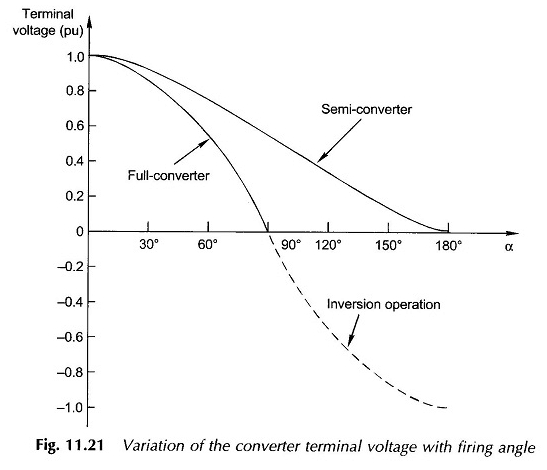
Abbildung 11.21 ergibt die Variation der Spannung des Motorterminals als Funktion des Aufnahmewinkels für den Halbkonverter und den vollständigen Wandler. Im Fall des vollständigen Konverter -Inversionsvorgangs tritt 90 ° <α <180 ° auf.
Motorgleichungen für Durchschnittswerte sind

Und

Ersetzen der Gleichung. (11.8) und VA der Gleichungen (11.5) oder (11.6) in der Gleichung. (11.9) werden die Zahnradverschiebungen wie folgt angegeben:
Mit einem Halbvertreter,

Mit einem vollständigen Konverter

Der erste Term der Gleichungen. (11.10) und (11.11) repräsentieren die theoretische Geschwindigkeit von Nichtladung, während der zweite Term den Geschwindigkeitsabfall darstellt, der durch den Widerstand der Verstärkung verursacht wird. Die theoretische Geschwindigkeit ohne Last kann durch den Schießwinkel α variiert werden.
Bei einem diskontinuierlichen Strom hängt die durchschnittliche Spannung an den motorischen Klemmen vom β -Winkel (Aussterbenwinkel) ab, der selbst von der Geschwindigkeit des durchschnittlichen Motors N, dem durchschnittlichen Motorstrom IA und dem Schießwinkel α abhängt. Die analytische Behandlung dieses Falls geht über den Rahmen dieses Buches hinaus.
Doppelkonverter:
Der Doppelwandler kann in den vier Quadranten betrieben werden, wie in Abbildung 11.22 (a) gezeigt. Seine Schaltung ist in Abbildung 11.22 (b) dargestellt. Dies sind zwei vollständige Konverter, die in beide Richtungen zu DC konvertieren. Der Doppelwandler bietet praktisch sofortige Inversion der Spannung an DC -Klemmen.

Motorsteuerung der DC -Serie:
Halbkonverter und komplette Konverter werden auch zur Steuerung eines DC-Serienmotors verwendet. Die Gesamtinduktivität des Stromkreises ist aufgrund des Serienfeldes hoch, dessen Verstärkungsstrom hauptsächlich kontinuierlich ist.
Die motorischen Gleichungen unterscheiden sich, da der Durchfluss / der Pole nun proportional zum Verstärkungsstrom ist. Die Behandlung ähnelt ansonsten der einer Motorkontrolle mit kontinuierlichem Strom und wird hier nicht aus Platzmangel fortgesetzt.