Drum Controller für den Motor der DC -Serie:
Die Motoren der DC -Serie werden häufig für Krane, Aufzüge, Straßenbahnen und andere Anwendungen verwendet, bei denen der Motor unter der direkten Kontrolle eines Bedieners steht. In diesen Anwendungen können häufige Start-, Geschwindigkeits-, Stopp- und Inversionsschwankungen erforderlich sein.
Dc controller
Ein manuell ausgebeuteter Controller, der robuster als ein Start -Rheostat namens Drum Controller verwendet wird.
Der Drum Controller besteht aus einer Rotationstrommel mit Segmenten, die mit den Fixpunkten in Kontakt kommen. Der Geschwindigkeitsregler dieses Typs ist in Fig. 1 dargestellt.
1.62, in dem K eine Bogenbremsspule ist: EM ist ein Bremselektromath; FLS ist ein Rotationsschalter in eine Richtung und RLS ist ein Schalter für die Drehung in die entgegengesetzte Richtung. Der Drum Controller hat sechs Positionen für die Vorderseite und sechs Positionen für die entgegengesetzte Drehung des Motors.
Die Arbeitspositionen des Controllers werden durch vertikale spitzen Linien dargestellt. Der elektrolovige EM ist parallel mit dem Motor angeschlossen und setzt den Motor beim Start frei. Wenn der Motor getrennt ist, ist er mechanisch gebremst.
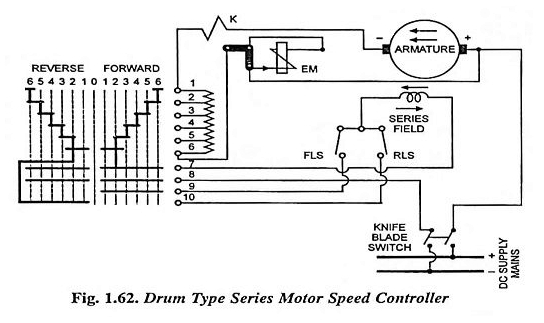
Wenn der Messerblattschalter geschlossen ist und der Controller in der vorderen Position 1 platziert ist, liegen die Verbindungen entlang der vertikalen Linie. In dieser Position stellen die Segmente Kontakte mit Fixpunkten 6 und 7, 8 und 9 her.
In dieser Position zirkuliert der Strom aus dem Bus + VE-Stab durch Wickeln in der Motorverstärkung, die Bogen-K-Bremsspule, das gesamte Start 1-6, die Fixpunkte 6 und 7 über Controller-Segmente, die Feldwicklung der Serie, den Frontgrenzschalter, die Fixpunkte 9 und 8 über die Controller-Segmente und kehren zur Negativbusbar zurück.
In der zweiten Position kommen die Segmente des Trommelcontrollers mit Fixpunkten 5 und 6 in Kontakt, die somit einen Teil des Startwiderstands der Schaltung setzen, so dass die Geschwindigkeit des Motors der Serie zunimmt.
In den folgenden Übertragungspositionen sind die 3., 4. und 5. zusätzlichen Schritte in den Startwiderständen aus der Schaltung und schließlich in der 6. Position gekommen, alle Startwiderstände und der Motor erreicht eine maximale Geschwindigkeit.
In den sechs nach vorne vorgeschriebenen Positionen ist die Richtung des Stroms in der Verstärkung sowie in der Wicklung des Feldes in Serie gleich (von rechts nach links), wie in Abbildung 1.62 gezeigt.
Aber in der entgegengesetzten Position zirkuliert der Strom aus dem Bus + VE-Stab durch Wickeln der Verstärkung, die Bremsspule des Bogenks, alle Startwiderstände 1-6, die Fixpunkte 6 und 10 über die Controller-Segmente, die RLS gegenüberliegend, die Feldwinkung der Serie, die Fixpunkte 7 und 8 über die Controller-Segmente und kehrt in die Busbars zurück.
Infolgedessen ist es offensichtlich, dass in den Inversionspositionen die Richtung des Stromflusses in der Wicklung der Verstärkung unverändert bleibt, während das Gegenteil durch die Wicklung des Feldes der Serie und so die Drehung des Motors umgekehrt wird.