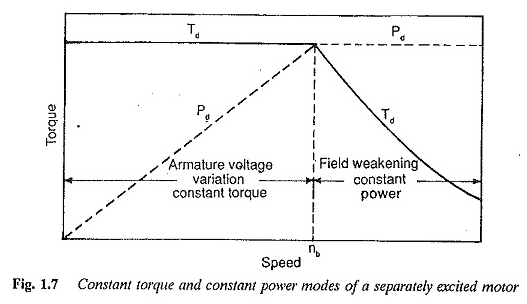
Shunt Motor DC mit Geschwindigkeitsmoment:
Die vorherige Diskussion zeigt, dass die Variation der Spannung der Verstärkung kriechende Geschwindigkeiten ergibt. Die einfache rheostatische Methode bietet ein DC -Shunt -Motor, das für das Geschwindigkeitsdrehmoment mit geringer Härte und wenig Stabilität charakteristisch ist.
Die Kontrolle von Ward Leonard (reibungslose Variation der Spannung) hingegen erzeugt ein flaches Merkmal mit angemessener Härte und Stabilität, jedoch hohe Anfangskosten. Eine einfache Methode mit geringen anfänglichen Kosten, um Kriechgeschwindigkeiten mit ausreichender Härte zu erhalten, ist in Abbildung 1.8 dargestellt.
Die herkömmliche rheostatische Kontrolle mit Reihenwiderstand mit der Verstärkung wird durch Schießen der Verstärkung mit geringem Widerstand modifiziert. Durch die Variation der Werte der Serien- und Shunt-Widerstände können die Geschwindigkeitseigenschaften so ausgelegt werden, dass sie die gewünschte Form haben.
Bei einfacher rheostatischer Kontrolle unter Verwendung von nur einem Serienwiderstand wird die Spannung durch das Tierheim von V. Vakuumgeschwindigkeit durch V entschieden, unabhängig vom Wert von Rs. Wenn die Verstärkung durch RSH abgeschoben wird, wird die Spannung durch den Rahmen auch ohne Last niedriger als V.
Die leere Geschwindigkeit nimmt mit geeigneten Werten von Rs und RSH auf den gewünschten Wert ab. Je kleiner der Wert von RSH ist, desto mehr ist die Spannung die Spannung durch den Rahmen ohne Laden. Schließlich nimmt die Nichtlastgeschwindigkeit ab. Der RSH -Wert ist auch effektiv, um das Gericht charakteristisch zu machen.


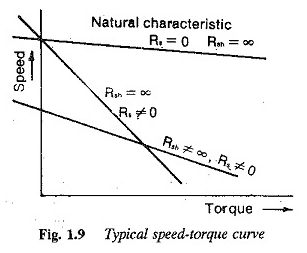
Die typischen Eigenschaften der Kükengeschwindigkeit sind in Abbildung 1.9 dargestellt, in der das natürliche Merkmal des Shunt -DC -Motors und das Merkmal mit einer einfachen rheostatischen Kontrolle sind. Diese Änderung kann verwendet werden, wenn ein stabiler Betrieb mit niedriger Geschwindigkeit erforderlich ist. Es kann für den genauen Stopp des Lesers verwendet werden. Durch das Ändern des Werts von RSH kann die Geschwindigkeit auf einen sehr niedrigen Wert reduziert werden und die entsprechende mechanische Bremsung kann angewendet werden, um einen bestimmten Stopp zu haben. 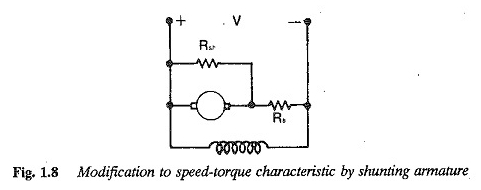
In Bezug auf Abbildung 1.8 haben wir 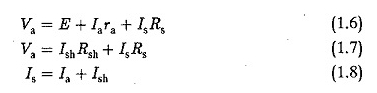
Durch die Verwendung dieser Gleichungen haben wir

Auch aus Gleichungen (1,8) und (1,7)

Verwenden dieser Beziehungen in der Gleichung. (1.6) Wir haben

Ersatz für / a in Bezug auf TD haben wir

Das Merkmal von Speed-Toe ist in Abbildung 1.9 dargestellt. Die folgenden Punkte sind aus der Abbildung klar:
1. Die Lastgeschwindigkeit (TD = 0) nimmt ab bis 
als Wert von 
Der RSH -Wert ist niedriger, dieser Wert ist kleiner. Die Steigung nimmt auch ab, wenn RSH klein ist. Die Härte wird somit verbessert und der stabile Betrieb wird in Bezug auf eine einfache rheostatische Kontrolle sichergestellt.
2. Die sanfte Geschwindigkeitsregelung hängt davon ab, wie RSH und RS variiert werden. Die Geschwindigkeitskontrolle ist erstaunt, da die Widerstände in einem verteilten Seemann variieren können.
3. Kavage unter der Grundgeschwindigkeit ist möglich. Die leere Geschwindigkeit selbst ändert sich nach den Variationen von RSH. Ein klarer Abfall der leeren Geschwindigkeit kann beobachtet werden, wenn der RSH verringert wird. Die Geschwindigkeitskontrolle wird erhalten, indem der Wert von Rs variiert.
Die Methode entspricht dem Feld, das das Feld stärker wird, und liefert Ergebnisse ähnlich wie durch Erhöhen des Feldstroms auf einen gegebenen Verstärkungsstrom.
4. Die Methode ist für konstante Drehmomentlasten geeignet, so dass der Verstärkungsstrom im Nennwert ist.
5. Die Methode ist geeignet, wenn der genaue Stopp ist
6. Es ist nicht wirtschaftlich für den kontinuierlichen Betrieb. RSH- und RS -Verluste machen das System unwirksam. Die Methode kann verwendet werden, wenn für kurze Zeit stabile Rampengeschwindigkeiten erforderlich sind.