CC -Motor ohne Bürsten:
Der Begriff CC -Motor ohne Besen wird auf zahlreiche Konfigurationen von Wechselstromsynchronmotoren angewendet, bei denen die Halbleitersteuerung verwendet wird, um Statorströme wie maximales Drehmoment bei einer bestimmten Geschwindigkeit zu steuern.
In einem herkömmlichen Motor behält der mechanische Schütz, der Schalter die Verschiebung von Grad bei 90 ° Grad zwischen den Magnetfeldern des Rotors und dem Stator bei, um das erforderliche Drehmoment bereitzustellen.
Theoretisch können die Stator- und Rotorfunktionen einer Maschine umgekehrt werden, wodurch das Feldsystem auf den Rotor gesetzt wird.

Es gibt keinen Vorteil, wenn ein herkömmlicher Umschalter verwendet wird, da die Schalterschnitte festgelegt sind und das Zahnrad der Bürste mit der Geschwindigkeit des Rotorfeldes drehen muss.
Durch Transistoren oder Thyristoren, die durch Positionssensoren ausgelöst werden, zu Halbleitern umstellen, kann dies jedoch das Zahnrad von Bürsten durch einen vollständig elektronischen Schalter ersetzen und kleine Maschinen durch eine wertvolle Kontrollanlage dominieren.

Bei dieser Methode ist jede Phase der Statorwicklung durch einen Leistungstransistor (oder Thyristor) durch ein Signal des am Rotors platzierten Positionssensors nacheinander energetisch.

Aufgrund der Hintergrundbeleuchtung der Position des Thyristors / Transistor -Rotors befindet sich das Stator- und Rotorfeld immer noch in Synchronismus, da die Triggerfrequenz automatisch an die Motordrehzahl eingestellt wird. Die Länge der Transistorenzeiten bestimmt die Amplitude des Motordrehmoments.
Somit kann durch elektronische Schaltkreise der Besen ohne Besenmotoren auf einen konstanten und variablen Drehmomentbetrieb überprüft werden.
CC -Motoren ohne Besen sind im Allgemeinen teurer für denselben KW -Hinweis, der im Vergleich zu herkömmlichen Motoren vermisst und gebürstete Motoren haben.
Vorteile des CC ohne Besenmotor:
- Sie erfordern wenig oder gar keine Wartung.
- Sie haben ein viel längeres Betriebsleben.
- Es besteht kein Risiko einer Explosion oder Möglichkeit einer HF -Strahlung aufgrund des Bogens.
- Sie produzieren keine Bürsten oder Partikel oder wechseln Gas als operative Nebenprodukte.
- Sie sind in der Lage, in Flüssigkeiten, brennbaren Gasen ausgesetzt zu werden, und können sogar fest versiegelt werden.
- Sie sind im Allgemeinen effektiver als Pinsel -DC -Diener oder herkömmliche DC -Motoren.
- Sie bieten eine schnellere Reaktion und ein ziemlich lineares Ausgangsdrehmoment im Vergleich zum Eingangsstromcharakteristik, das sich für Servoanwendungen eignet.
Prinzip des Diagramms und Betriebscc -Motor ohne Besen:
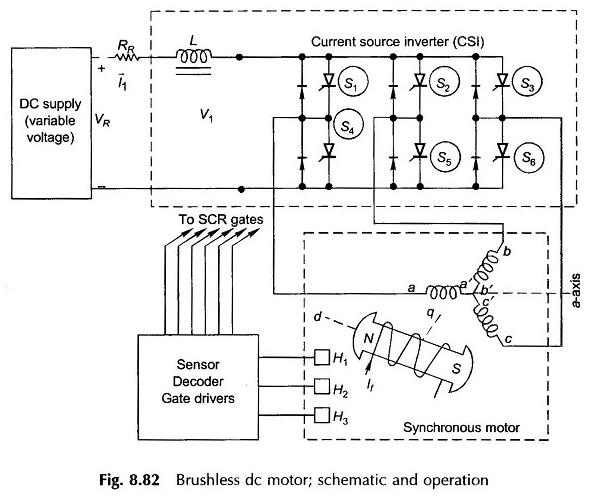
Das schematische Diagramm eines CC -Besens ist in Abbildung 8.82 dargestellt. Es zeigt auch die drei Phasen des Stators (Verstärkung) und des Rotors mit angegebenen D- und Q -Achsen.
Der Stator ist über eine Induktivität und einen Wechselrichter mit sechs SCR (S1 bis S6) an eine variable Spannungsstromquelle angeschlossen. Anstelle der SCRs kann der Stromtransistor oder der FET gemäß der Leistung des Motors verwendet werden.
Die Dioden werden durch die SCRs verbunden, um sie vor der Spannung L (di / dt) zu schützen, die in der Verstärkungsspule induziert wurde.
Die auf dem Rotor platzierten Positionssensoren liefern ein Signal für Sensor -Decoder und Gittertreiber, die eine Sequenzsequenz in Sequenz verursachen, um sich in Synchronismus mit der mechanischen Position des Rotors zu befinden.
Die Stator- und Rotorfelder sperren sich somit selbst und bleiben in jeder Geschwindigkeit des Rotors in Synchronismus.
Die idealen Phasenströme sind Impulse von ± I bei 120 °, wählen Sie jede Hälfte aus und bewegt sich voneinander auf 120 ° Auswahlphase zu Phase, wie in Abbildung 8.83 angegeben. Reale Stromformen unterscheiden sich von den rechteckigen Stromwellen ideal durch Erhöhung und allmählicher Sturz.
Ein solcher Wechselrichter, bei dem der Strom in Form von konstanten Stromimpulsen fließt, wird als Stromserivoter (CSI) bezeichnet.

Die Inverter -Aufnahmesequenz, wie in Abbildung 8.83 gezeigt, stammt sofort aus Phasenstromformen. Für diese 120 ° oder 60 ° SCR -Aufnahmesequenz werden ausgewählte Sensorcodes für verteilte Sensors unter Verwendung empfindlicher Lichtsensoren oder Hall -Effekt erzeugt.
Abbildung 8.84 zeigt den Fall von 120 ° Abstand, bei dem diese für Licht empfindlichen Sensoren bei 120 ° festgelegt sind und Licht von einer festen Lichtquelle erhalten.
Der Rotor trägt eine Schalterscheibe mit einem Schneiden von 180 °, so dass die Lichtsensoren beim Laufen mit dem Rotor ein 180 ° -Licht erhalten und 180 ° dunkel sind. Die Sensoren erzeugen die Logik „1“, während sie während des Dunkels ein Licht und eine „0“ -Logik erhalten.
Es ist leicht zu erkennen, dass die drei Sensoren (fest) und die Kommunikationsscheibe (Rotation mit dem Rotor) eine Codesequenz des Sensors erzeugen, wie in Abbildung 8.83 angegeben, aus dem die elektronischen Schaltungen Triggerimpulse erzeugen, um Scrs in der Sequenz wie in der Abbildung angegeben zu ziehen.
Die relative Position der Kommunikationsscheibe kann die Pole des Rotors (Achse Iewrt D und Q) eingestellt werden. Für die sofortige Position des Rotors (mit festgelegten Scheiben wie angegeben) stellen wir fest, dass der Sensorcode einfach von 101 auf 100 verläuft.
Die Phase „A“ befindet sich in der Mitte ihres Stromimpulses, wenn der Strom von Phase B nach c geht. In diesem Moment ist das Statorfeld, das F̅1 resultiert, entlang der Achse A ausgerichtet, wie in Abb. 1 gezeigt.
8.83 (Die positive Richtung des Automobilstroms entgegengesetzt der positiven Richtung des induzierten FMF); Überprüfen Sie die Phase „A“, indem Sie die rechte Handregel des Flemens anwenden. Der Nordpol des Stators ist somit entlang der Achse A ausgerichtet.

Dieser Nordpol drückt den nördlichen Rotor, um ein Auto-Drehmoment zu erzeugen (der Winkel zwischen dem Rotor und dem Stator N-Plus ist β). Ein Indexmarker kann auf der Schalterscheibe erfolgen, die immer auf den Nordstator zeigt, während das Statorfeld synchronisch mit dem Rotor läuft.
Dieser Index macht einen γ -Winkel mit der Achse Q des Rotors (Achse D spät 90 °). Offensichtlich (β + γ) = 90∘. Der Winkel kann eingestellt werden, indem die Kommunikationsscheibe auf der mit den Polen des Rotors verbundenen Welle bewegt wird.

Ein kontinuierlicher Strommotor des permanenten Magneten unter Verwendung von Raumwirkungssensoren mit einem Wahlabstand von 60 ° ist in Abbildung 8.85 dargestellt. Die Sensoren erzeugen Logik 1 ‚, wenn sie n-pole und ansonsten „0“ ausgesetzt sind. Die Sensorcode -Sequenz für diese Anordnung ist leicht zu sehen und ist in Abbildung 8.83 angegeben.
Wenn H3 entlang der Achse A befindet, verläuft der Sensorcode für die angegebene Rotorposition von 000 bis 001, was bedeutet, dass sich der Strom in der Mitte der Leitung für die Phase „A“ befindet und von B nach c geht. Somit ist F1 entlang der Achse A gerichtet oder der Stator n-Pole ist entlang der G-IE-Achse
γ = 0 (siehe Abb. 8.84). Permanente Magnetmotoren werden im Allgemeinen für diesen Wert von γ angepasst (dies entspricht β = 90 °, besser für die Drehmomentproduktion).
CC -Motorschaltungsdiagramm ohne Bürsten:
Das Novotny-Abbas-Schaltungsmodell eines mit CC-Motoren ohne Besen genährten CSI ist in Abbildung 8.86 gezeichnet. Die (ausgewogenen) Ströme, die in die synchrone Maschine der Gleichstrommaschine fließen, ohne in Abbildung 8.82 konfigurierte Bürsten sind rechteckige Impulse, wie in den Wavelems von Abbildung 8.83 angegeben.
Echte Strömungen sind etwas abgerundete Impulse. Unsere Analyse basiert auf grundlegenden Wechselstromströmungen und harmonische Ströme werden ignoriert. Diese produzieren Felder räumlicher harmonischer Luftstoffe, die als nicht stationäres Feld das Rotorfeld ein Netto-Netto-Drehmoment erzeugen.
Zu gehen
I1 = Strom, der vom Wechselrichter durch die DC -Quelle angetrieben wird
ALSO
IM (aktuelle Phase RMS = Grundstrom
= (√6 / π) i1; kann durch die Fourier -Serie gezeigt werden
In Abbildung 8.86 (a) ist das synchrone Maschinenmodell das übliche, das durch die Reaktanz XD der synchronen Rektualachse und die EMF -EF -Anregung gekennzeichnet ist, wobei XD und EF direkt mit der Geschwindigkeit variieren, die die Betriebsfrequenz regiert.
Die EF -Amplitude ist natürlich durch das Merkmal der Magnetisierung mit dem Strom des Rotorfeldes verbunden. Das entsprechende Phasendiagramm ist in Abbildung 8.86 (b) gezeichnet, wobei IM, der Phasenstrom, in V (CA -Ausgangsspannung / Klemmenspannung der synchronen Maschine) durch Winkel φ gezeichnet wird. Der aktuelle führende Betrieb wird durchgeführt, da er zum Aussterben des Stroms im SCR -Schalter beiträgt.

Wir werden jetzt das Wechselstrommodell von CSI unter den Bedingungen erstellen:
- Iae = im
- Der Parameter der Modellschaltung ist der RAE -Widerstand.
- Ege und IAE sind in Phase.
Diese Bedingungen stellen sicher, dass dieser Teil des Modells tatsächlich die äquivalente CC -Maschine darstellt.
Wir sehen auch in Abbildung 8.84, dass der Phasenwinkel zwischen i̅m = ̅ae und EF tatsächlich der Winkel γ ist. Nehmen Sie nun die Leistung auf, die durch Phase der synchronen Maschine auf die der äquivalenten DC -Maschine umgewandelt wurde, die wir haben

Übersetzen Sie dieses Ergebnis im Phasendiagramm (Abb. 8.86 (b)), es wird klar, dass V und EGE durch eine xe fiktive Reaktanz verbunden sind, wie in der Schaltung von Abbildung 8.86 (a) angegeben. Wir werden jetzt die Beziehung für den Tev und Rae bekommen. Wechselrichterverluste vernachlässigen

Stellen Sie sich einen Kurzschluss bei Ege vor, dh ege = 0, wir haben
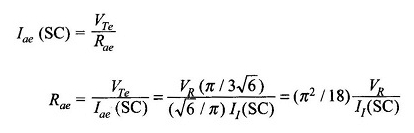
Aber
Vr / i1 (sc) = rr; Interner Gleichrichterwiderstand, der den Wechselrichter versorgt
ALSO
![]()
Eigenschaften des CC -Motors ohne Bürsten:
In Bezug auf Abbildung 8.84 (c)
![]()
Wie bereits in der Gleichung gezeigt. (8,121)
![]()
Aber EF kann als geschrieben werden
![]()
Oder
- Φf = Fluss / Pol, der durch ACT allein verursacht wird.
Ersetzen von Werten in der Gleichung. (8.124)
![]()
Oder

Mit Ausnahme der Wirkung von COS & ggr; ist diese Gleichung dieselbe wie in der herkömmlichen DC -Maschine.
Das entwickelte Paar wird von gegeben
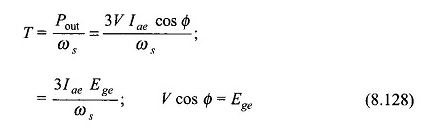
Verwenden der Gleichung. (8,126), wir bekommen
![]()
Wenn das Merkmal der Magnetisierung angeblich linear ist
![]()
Die Geschwindigkeits- und Drehmomentgleichungen sind dann
In einem synchronen Motor, da der Feldstrom reduziert ist, bleibt der PF mehr zurück. In einem CC -Motor ohne Bürsten (was ein synchroner Motor mit Rückkopplung in der Rotorposition ist) ist die Abnahme des Feldstroms bei einer Geschwindigkeitssteigerung gemäß der Gleichung.
(8,131) wie in einem herkömmlichen CC -Motor. Dies kann qualitativ durch die folgenden Argumentation erklärt werden. In Bezug auf Abbildung 8.86, als ob es reduziert wäre, sind EF und so Ege reduziert und RAE ist sehr niedrig, dies führt zu einem unverhältnismäßigen Anstieg von IAE = im.
Das Ergebnis ist die Beschleunigung des Rotors. Die Erhöhung der Geschwindigkeitsgeschwindigkeit des Rotorenthegens Die Reduktion des EF und der IM steigt mit zunehmender IMXD -Spannungsabfall mit zunehmender Betriebsfrequenz. Das Ergebnis ist ein regelmäßiger Betrieb mit einer neuen und höheren Geschwindigkeit, die weniger oder sogar spät dran ist.
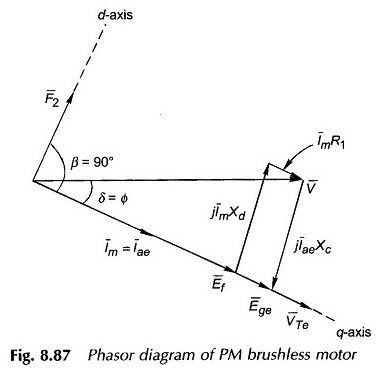
Motor DC ohne Besen PM:
Der kleine kontinuierliche Strommotor ist im Allgemeinen PM -Typen. In einem solchen Motorrotor bleibt das MMF F2 fest und auch der Winkel γ in diesen Maschinen auf Null eingestellt, was bedeutet, dass F2 und F1 (MMF der Verstärkung) durch einen 90 ° -Winkel bewegt werden (besser für das entwickelte Drehmoment).
Darüber hinaus ist die Resistenz gegen Phase -R1 -Wicklung nicht vernachlässigbar und muss daher im DC -Modell RAE hinzugefügt werden. Das Phasendiagramm für γ = 0 ist in Abbildung 8.87 gezeichnet, in der die folgenden Beobachtungen durchgeführt werden
- Xc = kapazitive Reaktanz = xD (in Amplitude).
- Der PF -Winkel bleibt hinterher zurück.
Die Beziehung von Gleichungen. (8,127) und (8,129) für Geschwindigkeit und Drehmoment gelten mit Ausnahme der Gleichung. (8.124) ändert sich nun als
![]()