DC -Motorarten:
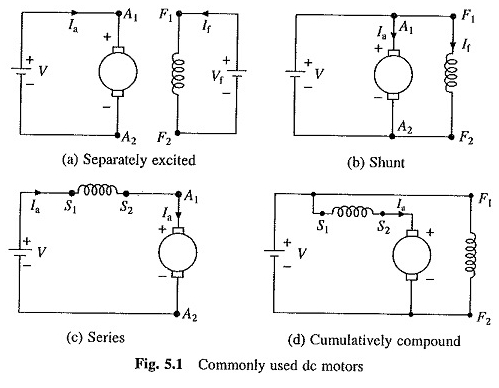
Die häufig verwendeten Strommotortypen sind in Abbildung 5.1 dargestellt. In einem angeregten Motor getrennt können Feld- und Verstärkungsspannungen unabhängig voneinander gesteuert werden. In einem Shunt -Motor sind das Feld und die Verstärkung mit einer gemeinsamen Quelle verbunden.
Gleichstrommotor – gleichstrommotor arten & dc motor types
Im Falle einer Serie in Serie entspricht der Feldstrom dem Verstärkungsstrom, und daher hängt der Feldfluss vom Verstärkungsstrom ab.
In einem kumulativen Verbindungsmotor ist die magneto-motive Kraft des Serienfeldes eine Funktion des Verstärkungsstroms und befindet sich in der gleichen Richtung wie MMF des Shunt-Feldes.
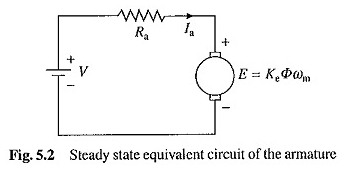
Der Schaltkreis entspricht dem Gleichgewichtszustand des Rahmens einer CC -Maschine ist in Abbildung 5.2 dargestellt. Der RA -Widerstand ist der Widerstand des Verstärkungskreises.
Für separat angeregte und Shunt -Motoren ist es gleich dem Widerstand der Verstärkung der Verstärkung und für die Motoren in Reihe und Verbindungen ist es die Summe des Wickelwiderstands des Rahmens und des Feldes. Die für alle Arten von CC -Motor anwendbaren grundlegenden Gleichungen sind

Oder
Φ – ist der Strömung durch Pole, Webers;
IA – der Verstärkungsstrom, a;
V – die Spannung des r -rip;
RA – Der Widerstand der ungewöhnlichen Schaltung, Ohm;
Ωm – die Geschwindigkeit der Verstärkung, rad / trocken;
T – das vom Motor entwickelte Drehmoment NM; Und
Ke – die Motorkonstante.
Der Gleichung. (5.1) zu (5.3) 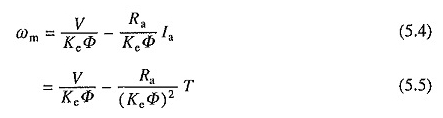
Shutors und getrennt aufgeregt:
Im Falle von Shunt- und aufgeregten Motoren getrennt kann der Strömung mit konstantem Feldstrom konstant angenommen werden. Zu gehen
![]()
Dann aus den Gleichungen. (5.1), (5.3) und (5.4) bis (5.6)

Die Eigenschaften von Geschwindigkeit und Korken eines angeregten Motors separat für die Klemmenspannung und das komplette Feld sind in Abbildung 5.3 dargestellt. Die Torca -Geschwindigkeitskurve ist eine gerade Linie.
Die lastfreie Beladungsgeschwindigkeit ωm0 wird durch die Felder der Verstärkung und der Feldanregung bestimmt. Die Geschwindigkeit nimmt mit zunehmendem Drehmoment ab und die Geschwindigkeitsregulation hängt vom Widerstand des Verstärkungsschaltungskreises (Gleichung (5.10)) ab. Der übliche Rückgang der Geschwindigkeit der Volllastlast im Falle eines mittelgroßen Motors,

ist ungefähr 5%. Die angeregten Motoren separat werden in Anwendungen verwendet, die eine gute Geschwindigkeitsvorschriften und eine einstellbare Geschwindigkeit erfordern.
Serienmotor:
In seriellen Motoren hängt der Durchfluss vom Verstärkungsstrom ab. Im ungesättigten Magnetisierungsmerkmal kann φ proportional zur AI sein. Also,
![]()
Gleichungen ersetzen. (5.3), (5.4) und (5.5) gibt an
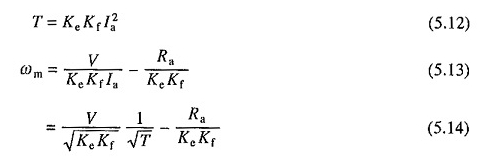
Wo der Widerstand gegen den Schaltkreis der RA -Verstärkung jetzt die Summe der Wickelwiderstände der Verstärkung und des Feldes ist. Die Eigenschaften von Torca und Korque-Strom eines Serienmotors an der nominalen und vollständigen Feldspannung sind in Abbildung 5.3 dargestellt.
Die Motoren der Serie eignen sich für Anwendungen, die ein hohes Startdrehmoment und schwere Drehmomentüberlastungen erfordern.
Angesichts der Tatsache, dass das Drehmoment proportional zum Verstärkungsstrom zum Quadrat ist, ist der Anstieg des Motorstroms bei gleichem Drehmoment im Vergleich zu einem angeregten Motor getrennt geringer, wo das Drehmoment proportional zur Verstärkung ist.
So werden bei schweren Drehmomentüberladungen und Start -up -Überladungen auf der Quelle und der thermischen Überladung des Motors auf vernünftige Werte begrenzt. Nach Gl. (5.14) Da die Geschwindigkeit umgekehrt wie die quadratische Wurzel des Drehmoments variiert, arbeitet die Maschine mit hoher Geschwindigkeit mit Lichtlast.
Im Allgemeinen ermöglicht der mechanische Widerstand einer Art kontinuierlicher Strommotor bis zu etwa doppelt so hoch wie die Nenndrehzahl.
Infolgedessen sollte der Motor der Serie nicht in den Scheiben verwendet werden, wo die Möglichkeit besteht, dass das Lastdrehmoment so weit aufgegeben wird, dass die Geschwindigkeit den Nominalwert zweimal überschreiten kann.
Zusammengesetzter Motor:
Die Eigenschaften der Torca-Geschwindigkeit und des Korkens eines kumulativen Verbindungsmotors sind ebenfalls in Abbildung 5.3 dargestellt. Die Geschwindigkeit ohne Last hängt von der Stärke des Shunt -Feldes und der Steigung des Merkmals auf der Stärke des Serienfeldes ab.
Kumulative zusammengesetzte Motoren werden in Anwendungen verwendet, bei denen ein schlafendes Merkmal der einer Serie in Serie erforderlich ist, und gleichzeitig muss die Lastgeschwindigkeit auf eine sichere Wette begrenzt sein. Typische Beispiele sind Aufzüge und Gewinner.
Es wird auch in intermittierenden Lastanwendungen verwendet, wobei die Last von nahezu ohne Last bis zu sehr schweren Lasten variiert. In diesen Anwendungen kann ein Lenkrad zur Ausgleich der Last auf die Motorwelle montiert werden.
Abgesehen von der Ausgleichslast der Stromversorgung ermöglicht die Verwendung eines kleineren Motors. Die Pressemaschine ist ein typisches Beispiel für diese Art der Anwendung.
Die Eigenschaften von Abb. 5.3, die an der nominalen Anschlussspannung und im vollständigen Feld erhalten werden, sind als natürliche Eigenschaften der Schlitzgeschwindigkeit bezeichnet. Die Nenngeschwindigkeit (oder die Volllast) wird als Grundgeschwindigkeit bezeichnet.
Universalmotor:
Der universelle Motor kann sowohl bei DC als auch bei Wechselstrom betrieben werden. Es ist im Wesentlichen ein Motor der DC -Serie mit einigen Konstruktionsunterschieden; die hauptsächlich eingeführt werden, um eine zufriedenstellende Leistung auf AC zu erzielen. In der Reihe in Serie hängt das Drehmoment vom Produkt des Rahmenstroms und des Feldflusses ab.
Die Inversion der inversen Klemmenspannung sowohl die Verstärkung als auch der Feldfluss. Daher blieb das Paar in die gleiche Richtung. Daher erzeugt der Motor der Serie, wenn er von einer CA -Quelle genährt wird, ein unidirektionales Drehmoment.
Obwohl das Drehmoment mit einer Frequenz von 100 Hz zwischen Null und seinem Kammwert schwankt, werden seine Schwankungen durch die Motorträhne geglättet und der Motor arbeitet mit gleichmäßiger Geschwindigkeit.
Ein einfacher Motor der DC -Serie funktioniert bei AC nicht gut. Hysterese- und Foucault -Stromverluste, die bei Feldpolen und -joken auftreten, verringern die Motoreffizienz und erhöhen die Wärmebelastung.
Der abwechselnde Fluss erzeugt große Ströme, die in den Spulen induziert werden, die während des Schaltens von den Bürsten kurz sind. Dies führt zu übermäßigem Funken für den Schalter. Der Motorleistungsfaktor ist aufgrund einer großen Induktivität des Feldes und der Verstärkung sehr mittelmäßig.
Der universelle Motor wurde speziell entwickelt, um diese Einschränkungen zu beheben. Zusätzlich zur Verstärkung werden auch die Feldpfosten und die Yokes gerollt, um die Stromverluste von Foucault zu verringern. Die Schicht mit hoher Permeabilität in Siliziumstahl wird verwendet, um den Hystereseverlust zu verringern.
Eine kompensatorische Wicklung wird in Reihe mit der Verstärkung eingesetzt, um die Induktivität der Verstärkung zu verringern. Die Induktivität des Feldes wird mit weniger Türmen und flachen Polstücken gesenkt. Trotz dieser Änderungen ist das Schalten bei der Förderung durch Wechselstrom schlechter als bei der Fütterung von DC.
Daher sind ihre Leistungsbewertungen selten größer als 1 kW. Es wird keine Lastgeschwindigkeit angehoben, aber im Allgemeinen nicht hoch genug, um den Motor zu beschädigen.
Die meisten universellen Motoren sind für die Verwendung bei Geschwindigkeiten von mehr als 3000 U / min hergestellt. Dies ist die maximale Geschwindigkeit eines Induktionsmotors, wenn er von einer Stromversorgung von 50 Hz geliefert wird. Unter dieser Geschwindigkeit wird der Induktionsmotor im Allgemeinen bevorzugt.
Viele Universalmotoren arbeiten mit Geschwindigkeiten von bis zu 12.000 U / min und können bis zu 20.000 U / min betreiben. Aufgrund hoher Betriebsgeschwindigkeiten ist der universelle Motor viel kleiner als bei einer Induktion oder einem CC -Motor mit niedrigem Geschwindigkeit einer identischen Notation.
Aufgrund der Bürsten und des Schalters erfordert es häufige Wartung und hat eine relativ kurze Betriebszeit.
Bis vor kurzem war der universelle Motor der billigste Motor, der mit hoher Geschwindigkeit und relativ sehr niedrigem Gewicht und Größe lief.
Kontinuierliche, motorische, motorische Typen oder eine einzelne Phaseninduktionsmotor, die von einem Wechselrichter variabler Frequenz in naher Zukunft zu seinem Konkurrenten wird.
Einige universelle Motoranwendungen sind Lüfter, elektrische Übungen, Haushaltsgeräte usw.
Permanente liebevolle Motoren:
In den kontinuierlichen Strommotoren des permanenten Magneten erfolgt die Aufregung am Boden durch ordnungsgemäß steigende permanente Magnete am Stator. Die Magnete von Ferriten oder seltenen Erden (Kobalt Samarium) werden verwendet. Ferriten werden aufgrund der geringeren Kosten üblicherweise verwendet, aber die Maschine wird aufgrund der niedrigsten Restlichkeit sperrig.
Die seltenen Erden aufgrund ihrer hohen Restlichkeit ermöglichen eine große Verringerung von Gewicht und Größe, aber sie sind sehr teuer. Permanente, liebevolle Motoren werden hauptsächlich im Bereich der Bruchmächte verwendet, sind jedoch bis zu 5 kW erhältlich.
Die Verwendung von permanenten Magneten zur Aufregung beseitigt den Kupferverlust im Feld und die Notwendigkeit von Tendern im Feld. Im Vergleich zu den Motoren der Wunden im Feld sind sie effektiver, zuverlässiger, robuster und kompakter.
Der Feldfluss bleibt für alle Lasten konstant, was ein lineareres Geschwindigkeitsdrehmomentcharakteristik ergibt. In einem aufgeregten Motor separat kann das Versagen der Lebensmittel auf dem Boden zu einem Fluchtzustand führen. Dies geschieht nicht in dauerhaften, liebevollen Motoren.
Da der Fluss in diesen Motoren konstant ist, kann die Geschwindigkeit nicht über der Grundgeschwindigkeit gesteuert werden. Diese Motoren haben Anwendungen in Elektrofahrzeugen wie Mopeds, Hebewagen, Radstühlen usw.
DC Servo Motors:
Es gibt keine klare Sharing -Linie zwischen dem Servo und der konventionellen Verletzung auf dem Feld und den dauerhaften, liebevollen DC -Motoren.
Servomotoren sollen in geschlossenen Schleifengeschwindigkeits- und Positionskontrollsystemen verwendet werden, bei denen die Leistungsanforderungen so sind, dass sie nicht durch einen normalen Gleichstrommotor erhalten werden können. Ein normaler CC -Motortyp ist entwickelt, um eine gute Volllastleistung mit minimalen Kosten zu erzielen.
Es bietet keine gute dynamische Reaktion und dauerhafte Klarstellung, wenn es in einem geschlossenen Schleifenspieler verwendet wird. Der Servomotor hingegen ist so konzipiert, dass er eine gute dynamische Leistung und eine dauerhafte Regimepräzision erzielt.
Es ist so konzipiert, dass es in beiden Rotationsrichtungen, ein hohes Drehmoment / Trägheitsverhältnis, niedrige Reibung und ein Drehmoment ohne glatte Welligkeit, dieselbe Leistung erzielt. In einer Art von kontinuierlicher Strommotor ist die Rahmenträglichkeit proportional zur Länge und zum Durchmesser im Quadrat.
In einigen Servomotoren wird die Trägheit reduziert, indem der Durchmesser verringert und die Länge für dieselbe Note erhöht wird. Bei niedrigen Leistungsmerkmalen, bei denen die Stromregelung nicht eingebaut ist, kann der Strom während des vorübergehenden Betriebs sogar höher als das Zehnfache des Nennstroms sein.
Der Schalter ist so konzipiert, dass er auch in so wichtigen Strömen einen Schalter ohne Funke erhalten kann, was in einem gemeinsamen Strommotor nicht möglich ist. Aufgrund dieser anspruchsvollen Anforderungen sind Servomotoren viel teurer als aktuelle CC -Motoren.
Ihre Notizen können einige Watt (in Instrumentenservos) bei Megha Watts (Stahlwalzen) sein. Kleine Servomotoren sind im Allgemeinen einen dauerhaften Magnettyp.
Bewegen von Spulenmotoren:
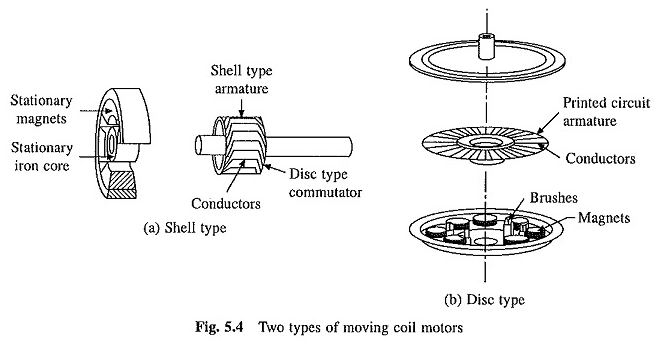
Einige Anwendungen erfordern eine viel höhere Beschleunigung als in einem herkömmlichen CC -Servomotor. Die Verstärkung der kontinuierlichen Strommotoren von mobilen Spulen weisen spezielle Konstruktionen auf, die eine erhebliche Verringerung der Rosen- und Induktivitätsträge ermöglichen und sehr hohe Beschleunigungen ermöglichen. Zwei Arten von sich bewegenden Spulenmotoren sind die Art von Hülle und Disc.
Art der Schale:
Um die Beschleunigung zu maximieren, muss die Trägheitsverstärkung minimiert werden.
In einem herkömmlichen CC -Motor besteht die Verstärkung aus einer Wicklung, die in Slots auf einem Zyklinder aus magnetischem Material untergebracht ist, das hauptsächlich geplant ist, einen geringen Abnutzungspfad für das Statorfeld zu ermöglichen und mit der Wicklung der Verstärkung zu läuft. Daher hat die Verstärkung eine hohe Trägheit.
In einem mobilen Spulenmotor vom Schalen -Typ (Abb. 5.4 (a)) besteht der Rotor nur aus einer Verstärkungswicklung. Daher hat es sehr niedrige Trägheit. Ein geringer Abnutzungsweg für das Statorfeld wird durch einen Zylinder aus stationärem magnetischem Material geliefert.
Die Verstärkungswicklung besteht aus Leitern, die zusammengebaut werden, um einen dünnen Wandzylinder zu bilden. Der Schalter kann wie bei herkömmlichen CC -Motoren oder beim Aufbau von Festplattentypen eine zylindrische Konstruktion aufweisen.
Winzige Motoren (mit Durchmessern um 1 cm), als Mikromotoren bezeichnet, haben eine Verstärkungswalze, die aus einfach lackierten Drähten besteht, die in zylindrischer Form und einem Schalter vom Typ Scheiben angeordnet sind. Diese Motoren werden in Kameras, Kartenspieler, Videosystemen usw. häufig verwendet.
In größeren Motoren erfolgt die Verstärkung der Verstärkung, indem die Leiter mit Polymer- und Glasfaserharzen zusammengefügt werden, um einen angemessenen mechanischen Widerstand bereitzustellen.
Art von Scheibe oder Pfannkuchen:
Die Details der Konstruktion sind in Abbildung 5.4 (b) dargestellt. Die Verstärkung erfolgt in Form einer Scheibe oder Pfannkuchen, und die Rahmenfahrer ähneln Strahlen auf einem Rad.
Die Verstärkungswalze wird gebildet, die Treiber von einem Kupferblatt gepuffert, sie zusammenschweißen und auf eine leichte Scheibe platziert. Die Fahrersegmente werden dann an einen Schalter in die Mitte der Scheibe angebracht.
Beachten Sie, dass die Richtung des Flusses axial ist und der Verstärkungsstrom radial ist. Dies ist nur gegen die (oder konventionellen) Schalenmotoren, bei denen der Strom axial ist und der Strömung radial ist. Das Betriebsprinzip entspricht dem eines herkömmlichen Gleichstrommotors.
Disc Mobile Coil -Motoren sind robuster und sind bis zu ein paar Kilowatt erhältlich. Sie finden Anwendungen, in denen sich der Axialraum in einem Bonus wie Werkzeugmaschinen, Discs usw. befindet.
Mit einer großen Anzahl von Fahrern können bewegte Spulenmotoren (einige hundert) geliefert werden. Daher bleibt das Paar fast konstant, wenn sich der Rotor dreht. Dies ermöglicht es ihnen, bei niedriger Geschwindigkeit eine sehr flüssige Rotation zu erzeugen.
Das Fehlen von Verstärkungseisen des Motors vom Typ Scheibenentyp eliminiert assoziierte Kernverluste, was es wirksamer macht als herkömmliche CC -Motoren. Wie bereits erwähnt, verleiht die Induktivität mit geringer Trägheit und niedriger Verstärkung bewegende Spulenmotoren eine hervorragende dynamische Reaktion.
Paarmotoren:
Die CC -Motoren, die für längere Zeiträume in einem Zustand in einem Stillstand oder bei niedriger Geschwindigkeit ausgestattet sind, werden als Drehmomentmotoren bezeichnet. Ein normaler CC -Motortyp ist entwickelt, um die Leistung bei voller Geschwindigkeit zu optimieren.
In kleinen Noten können der blockierte oder niedrige Geschwindigkeitsstrom in normalen CC -Motoren das 5- bis 10 -fache des Nennstroms betragen. Wenn diese Motoren mit niedriger Geschwindigkeit (oder gestoppt) arbeiten dürfen, wird die Wicklung des Rahmens durch Überhitzung verbrannt und der Schalter wird aufgrund einer Schwere beschädigt.
Im Falle von Drehmomentmotoren bleibt der blockierte und niedrige Geschwindigkeitsstrom unter der sicheren Wette. Einige Drehmomentmotoren sind so konzipiert, dass sie durch Intermittness mit niedriger Geschwindigkeit betrieben werden.
Die Anwendungen von Drehmomentmotoren können in drei Kategorien unterteilt werden:
- Wo der Motor im Staat im Stillstand arbeiten muss. Hier ist das Ziel des Motors, eine Spannung oder einen Druck zu entwickeln, der für ein Material ähnelt, ähnlich der Feder. Maschinen-Tools, der Splio ist Teil dieser Kategorie.
- In der zweiten Kategorie ist der Drehmomentmotor erforderlich, um sich nur in wenigen Revolutionen oder Revolutionsgraden zu bewegen. Das Öffnen von Ventilen, Schalter und Anziehungsgeräten ist einige Beispiele.
- Diese Anwendungskategorie impliziert eine kontinuierliche Bewegung des Motors bei niedriger Geschwindigkeit beispielsweise des Spulenleser.