Geschwindigkeitsregelung in geschlossener CC -Motorschleife:
Die Steuerung des CC -Motors geschlossene Schleife – Wandler (Gleichrichter und Hubschrauber) werden unter Verwendung von Halbleitergeräten erstellt, die eine sehr niedrige thermische Kapazität haben. Daher sind ihre vorübergehenden und stabilen Strömungen gleich.
CC -Motoren können den nominalen Strom 2- bis 3,5 -mal während kurzfristiger Übergangsoperationen wie Start, Bremsen und Inversion transportieren. Der Strom ist hoch, das Drehmoment ist hoch und die Übergangsantwort höher.
Wenn eine schnelle Reaktion während des Übergangsbetriebs erforderlich ist, kann der Motorstrom einen autorisierten Höchstwert haben. Die Konverter -Bewertung wird dann gleich dem maximal autorisierten Wert des Motorstroms ausgewählt.
Aufgrund der erheblichen Stromnotation werden die Kosten des Konverters nun höher sein. Wenn die schnelle Übergangsantwort nicht erforderlich ist, wird die Stromnotiz des Konverters so ausgewählt, dass sie der Küste der Motorströmung entspricht, um die Kosten des niedrigen Konverters aufrechtzuerhalten.
Die offenen Schleifen -Discs sind mit einer aktuellen Grenzgrenzsteuerung und zum Schutz des Konverters vor aktuellen Überladungen versehen.
Die Steuerung der geschlossenen Schleifengeschwindigkeit der CC -Motordiagramme wird mit einer internen Stromsteuerschleife geliefert, um den Strom innerhalb einer Sicherheitsgrenze zu begrenzen und den Leser auch in maximal autorisiertem Maximum zu beschleunigen und während des Übergangsbetriebs zu drehen.

Es ist jedoch zu beachten, dass die Verzögerung des Strom- oder maximalen Drehmoments möglich ist, wenn der verwendete Konverter auch die Kapazität des Bremsbetriebs aufweist.
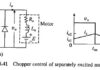
Es kann auch beachtet werden, dass der kontrollierte Gleichrichter verwendet wird, wenn die Versorgung Wechselstrom und der Hubschrauber verwendet wird, wenn die Stromversorgung DC ist.
Der grundlegende Ansatz zur Kontrolle der Geschwindigkeit, die unter und über die Geschwindigkeit geschlossen wurde, wird vom Leser in Abbildung 5.47 erklärt. Der Leser verwendet die interne Stromsteuerschleife und die Geschwindigkeitsschleife im Freien.
Ein solcher Leser arbeitet mit einem konstanten Feldstrom und einer variablen Unterbrechungsspannung unterhalb der Grundgeschwindigkeit und bei einer konstanten Verstärkungsspannung und einem variablen Feldstrom über der Grundgeschwindigkeit. Die Verstärkung und das Feld werden daher durch vollständig kontrollierte Gleichrichter gespeist.
Da die Verstärkung durch einen vollständig kontrollierten Gleichrichter gespeist wird, ist die vordere Bremsung nicht möglich. Der Leser wird nur wegen des Ladedrehmoments verlangsamt. Aufgrund der Kontrolle des internen Stroms mit dem aktuellen Begrenzer findet die Beschleunigung informiert und das maximale Drehmoment autorisiert.
Im Halbleiterwandler führt Fed häufig zum PI -Controller (proportional und integral), da sie Rauschen filtert, was ansonsten zu einem Problem werden kann. Der PI -Controller verleiht dem Gleichgewichtszustand auch eine gute Präzision.

Lassen Sie uns zunächst die Operation unter Grundgeschwindigkeit untersuchen. In der Feldsteuerschleife wird die EMF E mit einer Referenzspannung E * verglichen, die zwischen 0,85 und 0,95 der nominalen Verstärkungsspannung ausgewählt wird.
Der höchste Wert wird für Widerstandsmotoren mit niedrigem Verstärkungsschaltungsschaltungsmotoren verwendet. Für Geschwindigkeiten unterhalb der Grundgeschwindigkeit der Sättigungsfeldregler aufgrund eines großen EF -Fehlerwerts. Der Preiswinkel des αF -Feldgleichrichters wird bei Null gehalten, wobei die Nennspannung auf den Boden angewendet wird.
Dies garantiert den Nennfeldstrom für den Betrieb des Motors unterhalb der Grundgeschwindigkeit (ωmb). Wenn die Geschwindigkeitsreferenz von ω * m1 auf ω * m2 (ω * m2 <ωm1) aufgrund eines hohen Geschwindigkeitsfehlers erhöht wird, sättigt der Strombegrenzer die aktuelle Referenz auf den maximalen autorisierten Wert.
Der Leser beschleunigt das aktuelle und maximale Drehmoment. Wenn die Geschwindigkeit in der Nähe von ω * m2 reicht, wird der Strombegrenzer detailliert und das Fahren mit der Geschwindigkeit ωm2 und dem Strom eingestellt, das ein motorisches Drehmoment entspricht, das dem Lastdrehmoment entspricht.
Wenn die Geschwindigkeitsreferenz auf ω * m1 reduziert wird, wird die Stromreferenz auf Null definiert und der Leser aufgrund des Lastdrehmoments abgebrochen.
Wenn ωm etwas niedriger wird als ω * m1, fließt der Motorstrom wieder und führt schließlich zu Regeln bei der Geschwindigkeit ωm1 und dem Strom, für den das Motordrehmoment das Ladebrick ausbalanciert. Für einen negativen Geschwindigkeitsfehler ist i * a bei Null definiert, da das negative i * a ohne Verwendung ist.
Er wird jedoch den PI -Controller aufladen. Wenn die Referenzgeschwindigkeit wieder ansteigt, was die Geschwindigkeit des positiven Fehlers macht, dauert der geladene PI -Controller länger, was die Reaktion des vorübergehenden vorübergehenden.
Lassen Sie nun den Vorgang über der Grundgeschwindigkeit untersuchen. In der Nähe der Grundgeschwindigkeit ist der Feldsteuerer gesättigt. Wenn nun die Referenzgeschwindigkeit für eine Geschwindigkeit definiert ist, die größer als die Grundgeschwindigkeit ist, wird die aktuelle Referenz mit dem maximal autorisierten Wert definiert.
Der Schießwinkel des αA -Verstärkungsgleichrichters wird reduziert, um zunächst zuzunehmen. Der Motor beschleunigt, EF nimmt zu, EF nimmt ab und verringert den Feldstrom.
Somit steigt die Motordrehzahl weiter und der Feldstrom nimmt weiter ab, bis die Motordrehzahl der Referenzgeschwindigkeit entspricht. Da der Geschwindigkeitsfehler jetzt gering ist, kehrt er zu einem Wert in der Nähe des ursprünglichen Wertes zurück.
Somit wird die Geschwindigkeitsregelung über der Grundgeschwindigkeit durch Feldsteuerung mit der Verstärkungsspannung in der Nähe des Nennwerts erhalten. In der Feldsteuerungsregion (Grundgeschwindigkeit oben) reagiert der Leser aufgrund des großen Werts der Feldzeitkonstante sehr langsam.