Kontinuierliche Strommotor -Drehmomentgleichung:
Wenn die CC -Spannung auf den Rahmen eines kontinuierlichen Strommotors mit ihrem angeregten Feld durch DC angewendet wird, wird ein Drehmoment entwickelt und die Verstärkung läuft.
Es beschleunigt sich mit einer Geschwindigkeit, mit der die EMF in den égis der Verstärkung die angelegte Spannung ausgleichen und die folgende Drehmomentgleichung des DC -Motors erfüllt ist.
![]()

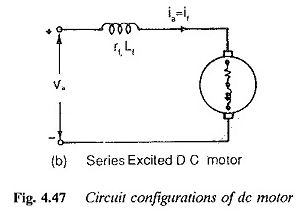
EB ist die EMF in der Verstärkung aufgrund der Rotation im gleichmäßigen Magnetfeld bei konstanter Geschwindigkeit N. Die Art dieser EMF besteht darin, sich der terminalen Spannung zu widersetzen und daher auch EMF bezeichnet. Die Schaltungsbedingungen sind in Abbildung 4.47 dargestellt.
Abbildung 4.47 (a) repräsentiert einen angeregten Motor getrennt, bei dem die Anregung durch einen unabhängigen Strom von AI bereitgestellt wird. Abbildung 4.47 (b) zeigt einen Serienmotor, in dem die Felder und Felder gleich sind. Die erzeugte Spannung ist gegeben durch


Oder
- Φ ist ein Fluss durch Pole
- Z ist eine Reihe von Inmarg -Treibern
- N ist Geschwindigkeit in der Ernährung
- 2p ist die Anzahl der Pole
- 2a ist die Anzahl der parallelen Pfade im Rahmen
Für einen gegebenen CC führt die Grundgleichung der Grundmaschine
![]()
Oder 
Die Drehmomentgleichung des durch den Rahmen entwickelten kontinuierlichen Strommotors ist gegeben durch

Ka wird als Motorinsmaturkonstante bezeichnet.

Mit Gleichungen 4.23 und 4.25 haben wir

In einem angeregten Motor kann φ separat angenommen werden, wenn die Reaktion der Verstärkung vernachlässigt oder versetzt wird.
Der Gleichung. 4.27 Es ist klar, dass die Geschwindigkeit eines DC -Motors durch Modifizierung des Werts von (va – iara) variiert werden kann.
Die Drehmomentgleichung des DC -Motors wird normalerweise auf zwei Arten durchgeführt:
- Durch Variieren des Werts der auf die Verstärkung angewendeten Spannung, wie im Ward Leonard -System (Abb. 4.48).
- Durch Einfügen zusätzlicher Widerstand in Reihe mit der Verstärkung (Abb. 4.49).

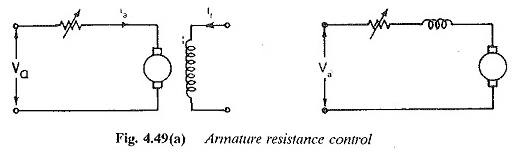

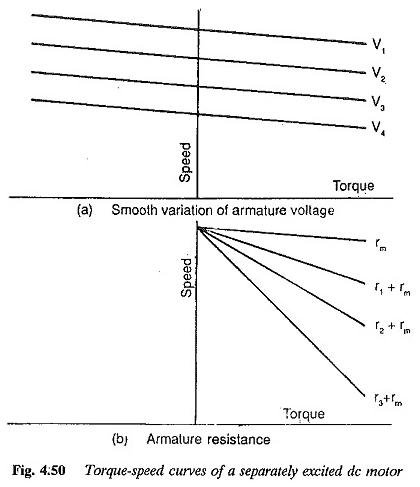
Im ersten Fall ist eine variable Spannungsstromversorgung erforderlich. Die Operation ist verlustlos und effektiv. Die Drehmomentgleichung des DC -Motors in Abhängigkeit von der Geschwindigkeitsmerkmale ist in Abbildung 4.50 dargestellt. In letzterem beinhaltet ein zusätzlicher Widerstand zusätzliche Verluste und der Motor wird weniger effektiv.
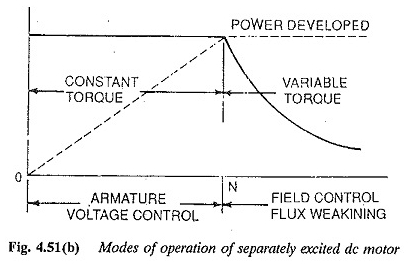
Die Geschwindigkeitsdrehmomentgleichung des Merkmals des DC -Motors ist in Abbildung 4.51 dargestellt. In beiden Fällen ist eine Geschwindigkeit von bis zu Null möglich. Der Motor arbeitet mit einem konstanten Drehmoment von Null bis zur Grundgeschwindigkeit.

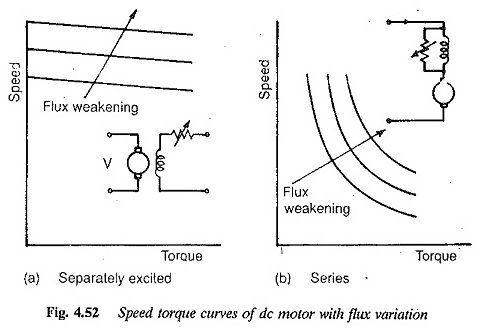
Die Geschwindigkeit eines DC -Motors wird auch durch die Variation des Feldflusses variiert. Geschwindigkeiten über den Grundgeschwindigkeiten sind in dieser Steuermethode möglich. Diese Methode ist für variable Drehmomentlasten geeignet.
Die Geschwindigkeitsregelung mit variabler Spannung ist sehr effektiv. Diese variable Spannung wird von einem Generator erhalten. Die Methode ist als Ward Leonard -Methode bekannt. Es ist sehr vielseitig und hat die folgenden Funktionen:
- Der Motor kann durch ordnungsgemäßes Einstellen des Motorfeldes auf ein konstantes Drehmoment (konstanter Bewehrungsstrom) beschleunigt werden.
- Die regenerative Motorbremsung ist möglich und der Motor kann sehr schnell ruhen.
- Vier betreiben, der Motorquadrant ist einfach.
- Die Kapitalkosten sind höher, da ein zusätzliches MG -Set erforderlich ist.
- Ausrüstung benötigt Platz.
Das Aufkommen der Thyristoren und die Entwicklung von Kraftwerken unter Verwendung von Thyristoren erleichterten die Geschwindigkeit der Elektromotoren einfacher und einfacher. Die Phasenkontrollgleichrichter liefern eine variable CC -Spannung am Rahmen eines Gleichstrommotors (Abb. 4.53).
Diese Konverter können auch als Wechselrichter arbeiten. In diesem Fall ist die regenerative Bremsung des kontinuierlichen Strommotors möglich. Durch eine angemessene Verbindung dieser Konverter ist ein reversibles Training möglich, das ein Automobil und eine Regeneration in den beiden Rotationsrichtungen ermöglicht.
Diese Konverter sind flexibler, haben eine schnellere Reaktion und belegen weniger Platz. Ein statisches System von Leonard Ward kann mit diesen Konvertern ermöglicht werden.
Es gibt jedoch bestimmte Nachteile, wie z. B. einen schlechten Leistungsfaktor auf der CA -Seite aufgrund des späten Stroms, der nicht -sinusoide Eingangsstrom mit einem reichhaltigen harmonischen Gehalt usw. Die Ladespannung wird durch einen Wellengehalt überlagert.
Der Ladestrom hat auch eine Welligkeit mit mittlerem Strom und RMS -Berichten auf einen durchschnittlichen Strom von mehr als einer. Eine große Induktivität ist an der Seite der Last erforderlich, um den Strom zu glätten. Manchmal ist der Ladestrom diskontinuierlich, was die Leistung verringert.
Der wellige Gehalt beeinflusst das Heizen und Schalten des Motors. Infolgedessen ist es notwendig, den Gleichrichter zu entwickeln, der eine Stromversorgung für den Motor bietet, der nur sehr wenige Leistungsschwankungen im Vergleich zu einer normalen Gleichstromversorgung verursacht. Manchmal wird das Design des DC -Motors so modifiziert, dass er für jeden Konverter verwendet werden kann.

Ein CC -Motor bei der normalen CC -Leistung erfordert einen Startwiderstand, um den Start -up -Strom zu begrenzen. Wenn Sie von einem Thyristor -Wandler genährt werden, kann der Startwiderstand verteilt werden und es ist ein weicher Start möglich. Der Motor kann auf ein konstantes Drehmoment beschleunigt werden.
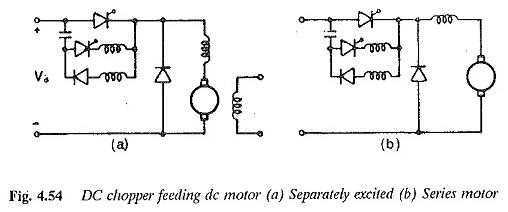
Der Hopper -CC kann zwischen den festen Spannungsrollkissen und dem CC -Motor eine variable Spannung für den Motor zur Verfügung gestellt werden, um die Geschwindigkeit zu steuern. Die Regeneration ist in diesem Fall auch möglich. Ein Programm von Leonard Static ist für den Betrieb von zwei und vier Quadranten möglich.
Die Chopper -Ausgangsspannung erfolgt in Form von Impulsen. Das Zeitverhältnis des Hubschraubers kann kontrolliert werden, um die durchschnittliche Spannung zu variieren. Der Ausgangsstrom variiert exponentiell während der Tonne und dem Toff des Hubschraubers. Der Ausgangsstrom variiert zwischen zwei Grenzen.
Es besteht die Möglichkeit einer diskontinuierlichen Leitung, wenn die Welle mehr und der Ladestrom klein ist. Der Hopper kann auch mit angegebenen Stromgrenzen überprüft werden, wobei die Methode als aktuelle Grenzkontrolle bezeichnet wird. Dies korrigiert die Häufigkeit von Hubschraubern.
Der wellige Inhalt kann durch eine angemessene Auswahl der Grenzen begrenzt werden. Die Strombegrenzungsregelung unterliegt weniger diskontinuierliche Leitung. Die Zunahme der Häufigkeit von Hubschrauber führt zu Verlusten. Süßer Start und Beschleunigung sind möglich.
Da die Batterie Lebensmittel bietet, fehlen harmonische Inhaltsprobleme und der Leistungsfaktor.
Die Leistung eines DC -Motors beim Betrieb auf Konvertern, die in Phasen- oder DC -Hubschrauber kontrolliert werden, unterscheiden sich stark von der Leistung, wenn die normale CC -Stromversorgung betrieben wird.
Der gecharterte aktuelle Inhalt beeinflusst die Motorleistung, während Harmonische und der schlechte Leistungsfaktor die Linienleistung beeinflussen. Ein Verständnis des Verhaltens hilft, den Konverter oder das Motordesign zu verbessern und eine bessere Leistung zu erzielen.