Steuerung des Motorgleichrichters in der DC -Serie:
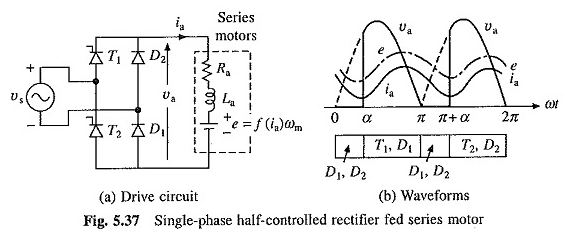
Die Steuerung des Einzelphasensteuerungsgleichrichters der DC -Serie -Motor wird in der Traktion verwendet. Eine halb kontrollierte Einrichtungssteuerung der DC -Serie ist in Abbildung 5.37 (a) dargestellt. Die äquivalente Motorschaltung ist ebenfalls angegeben.
Da die hintere EMF mit dem Verstärkungsstrom abnimmt, erfolgt die diskontinuierliche Leitung nur in einem schmalen Betriebsbereich. Daher wird es hier übersehen. Die VA, die AI -Wavelems und der sofortige Rücken der Rückseite für die kontinuierliche Leitung sind in Abbildung 5.37 (b) dargestellt.
Obwohl im Gleichgewichtszustand die Geschwindigkeitsschwankungen vernachlässigbar sind, ist E nicht konstant, aber mit der KI schwankt. Für eine bestimmte Geschwindigkeit ist E durch Motorisierungskurve des Motors mit AI verbunden, die aufgrund der Sättigung nichtlinear ist. Also


Der Betrieb des Motors wird durch die folgenden Gleichungen für den Service und die freien Radintervalle beschrieben.


Aufgrund des Vorhandenseins des Begriffs F (IA) sind Gl. (5.103) und (5.104) sind nichtlineare Differentialgleichungen und können nur digital aufgelöst werden. Eine einfache Analysemethode wird erhalten, wenn E durch ihren Durchschnittswert EA ersetzt wird

Oder
Da der Rückgang durch Induktivität aufgrund der Gleichstromkomponente des IA -Verstärkungsstroms Null ist

Für die kontinuierliche Leitung wird durch die halb kontrollierten und vollständig kontrollierten Einzelphasen -Einstellungen durch die Gleichungen angegeben. (5.93) bzw. (5.83).
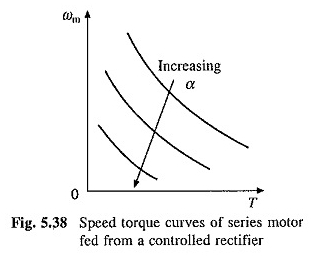
Die Sequenz der nächsten Schritte wird verwendet, um die Eigenschaft der Kükengeschwindigkeit für eine gegebene α-Berücksichtigung der Magnetschaltung zu berechnen: Für die KI wird ein Wert ausgewählt. Der entsprechende Wert von KA wird aus der Motorisierung des Motors erhalten.
Für den bekannten Wert von α geht berechnen aus der Gleichung. (5.93) oder (5.83), abhängig von der verwendeten Gleichrichterschaltung. Jetzt werden ωm und t aus Gl. (5.107) bzw. (5.108). Die Art der Getriebegeschwindigkeitseigenschaften für den Leser in Abbildung 5.37 (a) ist in Abbildung 5.38 dargestellt.
Fractionary HP Engine Control:

Aufgrund des kostengünstigen halben Cost-Halbkosten-Gleichrichters zu niedrigen Kosten aus Abb. 5.39 (a) wird die Verwendung eines einzelnen Thyristors üblicherweise zur Steuerung des CC Universal Bractal HP-, DC- und DC-Motoren mit permanentem Magnet verwendet. Diese Discs werden in Handwerkzeugen und kleinen Hausgeräten verwendet.
Die Spannung des motorischen Anschlusss und der Verstärkungsstromwellenwellenwellenlems sind in Abbildung 5.39 (b) dargestellt. Der Leser betreibt eine diskontinuierliche Leitung mit einem großen Strom -Strom -Intervall und einer signifikanten Welligkeit.
Folglich ist die Effektivität schlecht, die Geschwindigkeitsregulierung ist signifikant und die Geschwindigkeit kann um den Durchschnittswert schwanken, wenn die Trägheit niedrig ist. Manchmal wird eine Freilaufdiode hinzugefügt, um die Dauer des Nullstromintervalls zu verringern.
Universalmotoren können auch durch einen AC -Triac -Spannungsregler gesteuert werden, wie in Abbildung 5.40 (a) gezeigt. Der Triac wird auf α und (π + α) gezeichnet. Jetzt trägt die Maschinenverstärkung den Wechselstrom (Abb. 5.40 (b)).
Aufgrund der verringerten Dauer des Nullstromintervalls weist der Leser vernachlässigbare Geschwindigkeitsschwankungen und eine niedrigere Geschwindigkeitsregulierung auf.