CC CC Chopper Control getrennt:
Automobilsteuerung: Eine Transistor -Chopper -Steuerung des CC -Motors, die separat angeregt wird, ist in Abbildung 5.41 (a) dargestellt. Der TR -Transistor wird regelmäßig mit der T -Zeit betrieben und bleibt eine Menge Dauer eingeschaltet.
Das Stromschlüpfen arbeitet mit einer Häufigkeit, die hoch genug ist, um eine kontinuierliche Leitung zu gewährleisten. Die Wellenformen der VA -Motorspannung und des IA -Verstärkungsstroms für die kontinuierliche Leitung sind in Abbildung 5.41 (b) dargestellt. Während des Zeitraums bei der Transistorzeit 0 ≤ t ≤ Tonne ist die motorische Klemmenspannung V.


Die Operation wird von beschrieben von


In diesem Intervall geht der Verstärkungsstrom von IAL nach IA2. Da der Motor während dieses Intervalls an die Quelle angeschlossen ist, wird er als Serviceintervall bezeichnet.

Bei T = Ton wird TR gestoppt. Motorstrom Die freien Räder durch die DF -Diode und die Motorklemmenspannung sind während des Intervalls ≤ t ≤ T Null. Der Betrieb des Motors während dieses Intervalls, bekannt als freies Radintervall, wird durch beschrieben durch

Der Motorstrom nimmt während dieses Intervalls von IA2 bis IA1 ab.
Die Tonne Funktionsintervallbericht am t -Chopper -Zeitraum wird als Dienstbericht oder Servicezyklus (δ) bezeichnet. Also

In Abbildung 5.41 (b)

Gleichung (5.2) und (5.7) sind auch hier anwendbar

Gleichungen. (5.7), (5.8). und (5.114)

Die Art des Merkmals des Geschwindigkeitsdrehmoments ist in Abbildung 5.43 dargestellt.
Regeneratives Bremsen:
Die Kontrolle der Hubschrauber des CC -Motors, die separat für den Betrieb der regenerativen Bremsung angeregt wurden, ist in Abbildung 5.42 (a) dargestellt. Der TR -Transistor arbeitet regelmäßig mit einer T -Periode und einer Tonne.
Die Wellenformen der VA -Motorspannung und des IA -Verstärkungsstroms für die kontinuierliche Leitung sind in Abbildung 5.42 (b) dargestellt. Normalerweise wird eine externe Induktivität hinzugefügt, um den Wert der zu erhöhen. Wenn TR beleuchtet ist, steigt die Zunahme von IA1 zu IA2.
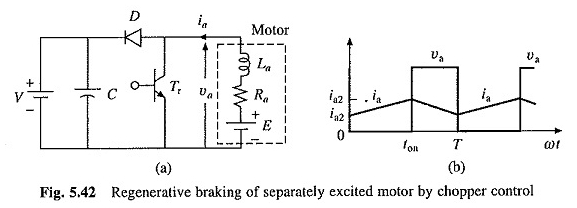
Die mechanische Energie, die durch den Motor in Strom umgewandelt wird und jetzt als Generator arbeitet, erhöht teilweise die magnetische Energie, die in der Induktivität des Verstärkungskreises gespeichert ist, und der Rest wird im Widerstand und Transistor des Rahmens abgeleitet.
Wenn TR deaktiviert ist, verläuft der Verstärkungsstrom durch die Diode D und die Quelle V und verläuft von IA2 nach IA1. Die gespeicherte elektromagnetische Energie und die von der Maschine gelieferte Energie werden mit der Quelle geliefert.
Das Intervall 0 ≤ T ≤ Tone wird jetzt als Energiespeicherintervall und TON -Intervall ≤ T ≤ T das Serviceintervall bezeichnet. Wenn δ erneut als Bericht des Serviceintervalls zum Zeitraum t definiert ist, dann dann

In Abbildung 5.42 (b)

und Abbildung 5.42 (a)

Da ist das umgekehrt
![]()
Gleichungen. (5.8), (5.118) und (5.119)

Die Art des Merkmals des Geschwindigkeitsdrehmoments ist in Abbildung 5.43 dargestellt.

Maschine und regeneratives Bremsen:
Trichterkreise. 5.41 und 5.42 können in Abbildung 5.44 kombiniert werden, um einen Hubschrauber zu erhalten. Der TRL -Transistor mit der Diode D1 bildet eine Hubschrittkreis ähnlich der von Fig.
5.41 und geben Sie daher die Kontrolle über den Betrieb der direkten Automobile. Der TR2 -Transistor mit der D2 -Diode bildet eine Hubschrittkreis, die der in Abbildung 5.42 ähnelt, und geben daher eine Kontrolle über einen Vorderbeinbetrieb.
Für den Antriebsvorgang wird der TRL -Transistor überprüft und für den Bremsvorgang wird der TR2 -Transistor kontrolliert. Die Änderung der Kontrolle von TRL zu TR2 geht vom Automobilbetrieb zum Bremsen und umgekehrt.
In den Servicegeräten, in denen der schnelle Übergang vom Auto zum Bremsen und umgekehrt erforderlich ist, werden TRL und TR2 gleichzeitig gesteuert. In einem Zeitraum t erhält TRL eine Türantrieb von 0 bis Δt und TR2 erhält eine Türantrieb von Δt nach t, wobei δ der Servicebericht für TRL ist.
Folglich wird von der 0 bis ΔT -Motor über TRL oder D2 an die Quelle angeschlossen, je nachdem, ob der IA -Motorstrom positiv oder negativ ist. Da dieser Zeitraum in diesem Zeitraum die aktuelle Änderungsrate immer positiv ist.
In ähnlicher Weise wird die motorische Verstärkung von ΔT bis T durch D1 oder TR2 kurzverkleidet, je nachdem, ob die KI positiv oder negativ ist, und während dieses Zeitraums ist die aktuelle Änderungsrate immer negativ. Die Spannung des motorischen Anschlusss und der Stromwellenwavelems ist in Abbildung 5.44 (b) dargestellt.
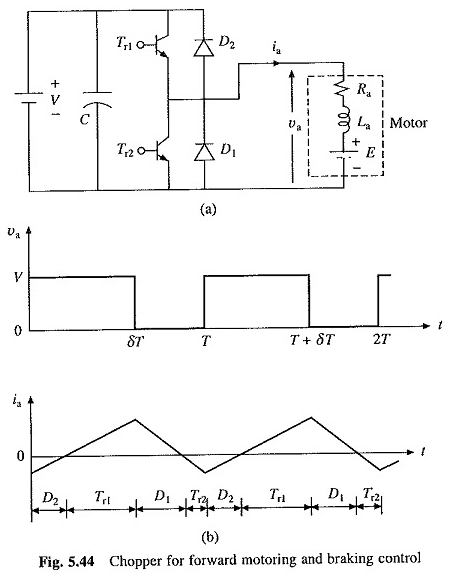
In Abbildung 5.44 (b)

Die obige Gleichung legt nahe, dass der Betrieb des Motors (+ ve ia) stattfindet, wenn Δ> (E / V) und regenerativer Bremsvorgang stattfinden, wenn δ <(e / v) und der Automobilübergang zum Bremsen übergehen und umgekehrt auftritt, wenn Δ = (E / V).
Die obigen Gleichungen ähneln denen, die für den Hubschrauber in Abb. (5.41) erhalten wurden, und berücksichtigen daher die gleichen Zahlen
Dynamisches Bremsen:
Der dynamische Bremskreis und ihre Wavelems sind in Abbildung 5.45 dargestellt. Während des Intervalls 0 ≤ t ≤ Tonne steigt die AI von IA1 bis IA2. Ein Teil der erzeugten Energie wird in Induktivität gespeichert und die Ruhe wird in RA und Tr abgelöst. Während der Intervallton ≤ t ≤ T nimmt die Abnahme von IA2 zu IA2 ab.
Die in der Induktivität erzeugten und gespeicherten Energien werden im Bremswiderstand RB, RA und Diode D abgeleitet. Der Transistor TR steuert die Amplitude der in RB abgeleiteten Energie und steuert daher ihren wirksamen Wert.

Wenn KI ein DC ohne Ripple sein soll, dann ist die in RB während eines Betriebszyklus der Hubschrauber verbrauchte Energie
![]()
Durchschnittliche Leistung von RB verbraucht

Effektiver RB -Wert

Oder

Die Gleichung (5.122) zeigt, dass der effektive Wert des Bremswiderstandes ohne Schritt von 0 auf Rb geändert werden kann, da δ von 1 auf 0 gesteuert wird. Wenn die Geschwindigkeit fällt, kann δ erhöht werden, um den Motor auf ein konstantes maximales Drehmoment zu verlangsamen, wie in Abbildung 5.8 nach der Kette zu übernehmen.