Steuerung des vollständig kontrollierten Einzelphasengleichrichters des CC -Motors:
Die Steuerung des vollständig kontrollierten Einzelphasengleichrichters des CC -Motors ist in Abbildung 5.26 (a) dargestellt. Der Motor wird durch seine äquivalente Schaltung angezeigt. Feldfutter wird nicht angezeigt. Wenn die Steuerung des Feldes erforderlich ist, wird das Feld aus einem kontrollierten Gleichrichter angetrieben, wenn nicht aus einem unkontrollierten Gleichrichter. Die Eingangsspannung wird durch definiert durch

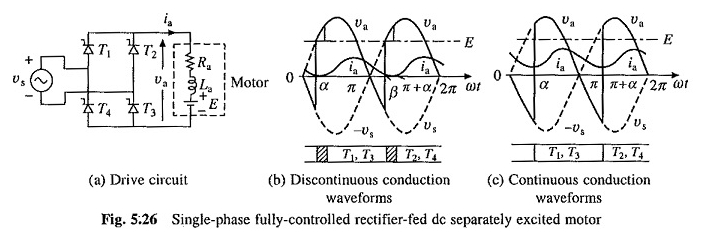

In einem Quellspannungszyklus empfangen die T1- und T3 -Thyristoren Türsignale von α bis π und die T2- und T4 -Thyristoren (π + α) Türsignale auf 2π. Wenn der Verstärkungsstrom nicht kontinuierlich fließt, arbeitet der Motor in einer diskontinuierlichen Leitung.
Wenn der Strom kontinuierlich zirkuliert, wäre die Leitung kontinuierlich. Der Leser in Betracht gezogen, arbeitet hauptsächlich in einer diskontinuierlichen Leitung. Die diskontinuierliche Leitung hat mehrere Betriebsmodi.

Die ungefähre, aber einfache Analysemethode wird erhalten, wenn nur der dominante Modus der diskontinuierlichen Leitung berücksichtigt wird.

Die Spannung des motorischen Anschlusss und der Stromwellenwellen für die Modi diskontinuierlicher Leitung und dominanter kontinuierlicher Leitung ist in den Fig. 1 und 2 dargestellt. 5.26 (b) und (c).
Im diskontinuierlichen Leitungsmodus des kontrollierten Gleichrichters vollständig kontrollierte Einzelphase des CC -Engine beginnt der Strom mit der Implementierung der T1- und T3 -Thyristoren bei ωt = α zu fließen. Der Motor ist an die Quelle angeschlossen und seine Klemmespannung ist gleich gegenüber v.
Der Strom, der nach ωt = π gegen die beiden, E und die Quellspannung fließt, fällt von Null bis β. Aufgrund des Fehlens von Deaktivierung von Strom T1 und T3. Die Spannung des motorischen Klemmens entspricht nun seiner induzierten Spannung E. Wenn die T2- und T4 -Thyristoren an (π + α) gezogen werden, beginnt der folgende Zyklus des Motorterminals.
Im kontinuierlichen Leitungsmodus der Kontrolle des vollständig kontrollierten Einzelphasengleichrichters des kontinuierlichen Stroms zirkuliert ein positiver Strom durch den Motor, und T2 und T4 leiten kurz vor α. Die Anwendung von Gitterimpulsen wird auf voreingenommenen Thyristoren vor T1 und T3 bis α aktiviert.
Die Leitung von umgekehrten Verzerrungen T1 und T3 T2 und T4 deaktiviert sie. Ein VA -Zyklus wird beendet, wenn T2 und T4 bei (π + α) aktiviert sind, was die Deaktivierung von T1 und T3 verursacht.
Da der Verstärkungsstrom kein perfekter DC ist, schwankt das Drehmoment des Motors. Da das Drehmoment bei einer Frequenz von 100 Hz schwankt, kann die Motorträgie Schwankungen filtern, was eine nahezu konstante Geschwindigkeit und einen Ripple E.
Nicht leitende Leitung:
In einer vollständig kontrollierten Einzelphasen -Gleichrichtersteuerung der Spannung des VA -Motorsteuerklemmens arbeitet der Leser in zwei Intervallen (Abb. 5.26 (b)):
- Serviceintervall (α ≤ ωt ≤ β), wenn der Motor an die Quelle angeschlossen ist und VA = Vs.
- Nullstromintervall (β ≤ ωt ≤ π + α), wenn Ia = 0 und Va = E. E.
Die Funktionsweise des Lesers wird durch die folgenden Gleichungen beschrieben: 
Gleichungslösung. (5.72) hat zwei Komponenten, eine aufgrund der Quelle Ca (VM / Z) sin (ωt – φ) und andere aufgrund der EMF ( – e / ra). Jede dieser Komponenten hat wiederum eine Übergangskomponente. Entweder diese werden dann durch einen einzelnen Aussteller k1e-t / τa dargestellt

Oder

und τa wird durch Gl. (5.25).
Die K1 -Konstante kann durch Unterschied der Gleichung bewertet werden. (5.74) im Ausgangszustand Ia (α) = 0. Ersetzen Sie den in der Gleichung erhaltenen Wert von k1. (5.74) gerendert

Da IA (β) = 0 der Gleichung. (5.77)

β kann durch iterative Lösung der Gleichung bewertet werden. (5.78).
Da der Spannungsverfall durch die Induktivität der Verstärkung aufgrund der CC -Komponente des Verstärkungsstroms Null ist
![]()
Wo sind und die DC -Komponenten der Spannung bzw. der Verstärkungsstrom sind jeweils. In Abbildung 5.26 (6)
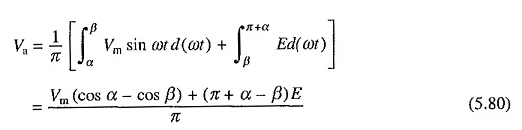
Der Verstärkungsstrom besteht aus DC IA -Komponenten und Harmonischen. Wenn der Fluss konstant ist, erzeugt nur die CC -Komponente ein regelmäßiges Drehmoment. Harmonische erzeugen alternative Drehmomentkomponenten, deren Durchschnittswert Null ist. Daher wird das Motordrehmoment immer durch die Gleichung gegeben. (5.7). Gleichungen. (5.7), (5,8), (5.79) und (5.80)

Die Grenze zwischen kontinuierlicher und diskontinuierlicher Leitung wird erreicht, wenn β = π + α. Ersetzen von β = π + α in Gl. (5.78) ergibt den kritischen Wert der Geschwindigkeit ωmc, die die kontinuierliche Leitung von der diskontinuierlichen Leitung für ein gegebenes α AS trennt

Kontinuierliche Leitung:
In Abbildung 5.26 (c)

Gleichungen. (5.7), (5.8), (5.79) und

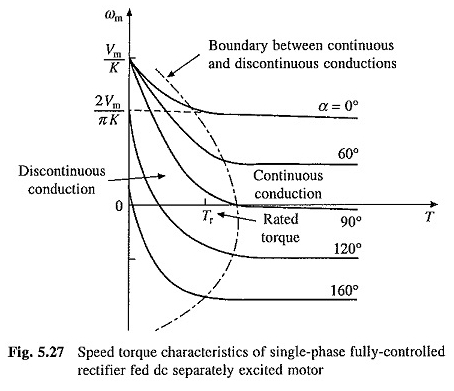
Die Geschwindigkeitsdrehmomentkurven für den Leser sind in Abbildung 5.27 dargestellt. Die ideale Operation ohne Last wird erhalten, wenn IA = 0. Wenn die beiden Thyristorpaare (T1, T3) und (T2, T4) nicht verwalten, ist IA Null. Dies geschieht, wenn e> vs während des Zeitraums, für den müde Impulse vorhanden sind, vorhanden ist.
Daher, wenn α <π / 2, E größer oder gleich dem VM sein muss und wenn α> π / 2, E größer oder gleich VM sin ωt sein sollte. Daher wird keine Lastgeschwindigkeit gegeben

Die maximale durchschnittliche Klemmenspannung (2 VM / π) wird gleich der nominalen Motorspannung ausgewählt. Ideal ohne Motorlastgeschwindigkeit, wenn sie durch eine perfekte direkte Spannung des Nominalwerts angetrieben wird (2VM / πK).
Es ist interessant festzustellen, dass die maximale Geschwindigkeit ohne Last mit der Gleichrichtersteuerung (π / 2) dieses Wertes beträgt. Die Grenze zwischen kontinuierlicher und diskontinuierlicher Leitung wird durch gepunktete Linie dargestellt (Abb. 5.27).
Für Paare, die weniger als bewertet sind, arbeitet ein niedriger Laufwerk hauptsächlich in einer diskontinuierlichen Leitung. In der kontinuierlichen Leitung sind die parallele geraden Linien parallele Linien, deren Steigung gemäß (5.84) vom Widerstand gegen den RA -Verstärkungskreis abhängt.
Die Wirkung der diskontinuierlichen Leitung besteht darin, die Regulierung der Geschwindigkeit schlecht zu machen. Dieses Verhalten kann aus den Wavelems von Abb. 5.26 (b) und (c) erklärt werden. Bei kontinuierlicher Leitung fällt bei einem gegebenen α jede Zunahme des Drehmoments ωm und e ab, so dass die KI und T zunehmen können.
Die durchschnittliche Klemmenspannung bleibt konstant. In der diskontinuierlichen Leitung führt jede Zunahme des Paares und die Erhöhung von AI zu einer Zunahme des β und einem Abfall von AV. Daher sinkt die Geschwindigkeit um eine größere Menge.
Der Leser arbeitet in den Quadranten I (Automobile vorwärts) und IV (Reverse Regenerative Brems). Diese Operationen können wie folgt erklärt werden:
Der Gleichung. (5.84) unter der kontinuierlichen Leitungshypothese variiert die CC -Ausgangsspannung des Gleichrichters mit α, wie in Abbildung 5.28 (a) gezeigt. Wenn Sie im Quadranten I arbeiten, ist ωm positiv und α ≤ 90 °; Und die Polaritäten von VA und E sind in Abbildung 5.28 (b) dargestellt.
Für eine positive KI führt dies dazu, dass der Gleichrichter Energie und den Motor verbraucht und so ein Automobil nach vorne gibt. Die Polaritäten von E, AI und für die Funktionsweise des Quadranten IV sind in Abbildung 5.28 (c) dargestellt. E hat sich aufgrund der Umkehrung von ωm umgekehrt.
Da KI immer in der gleichen Richtung ist, arbeitet die Maschine als Generator, der ein Bremsmoment erzeugt. Zusätzlich aufgrund von α> 90 ° ist VA negativ, was darauf hindeutet, dass der Gleichrichter nun die Leistung von CC -Terminals übernimmt und in den Wechselstromsektor überträgt.
Dieser Gleichrichterbetrieb wird als Umkehrung bezeichnet und der Gleichrichter würde als Wechselrichter funktionieren. Da das erzeugte Angebot an der Quelle dieses Vorgangs bereitgestellt wird, handelt es sich um eine regenerative Bremsung.

Zwei Betriebskapazitäten des Quadranten des Lesers können nur mit Revisionsgebühren oder anderen aktiven Gebühren verwendet werden, die den Motor in die entgegengesetzte Richtung treiben können.
Beim normalen Betrieb mit zwei Motorquadranten wird ein direkter Griff benötigt (Quadrant I) und ein vorderes Bremsen (Quadrant II), der vom Leser in Abbildung 5.26 (a) nicht geliefert werden kann.