CC CC Control de helicóptero por separado:
Control del automóvil: un control de helicóptero del transistor del motor CC, que se excita por separado se ilustra en la Figura 5.41 (a). El transistor TR se opera periódicamente con el período T y permanece encendido durante una tonelada de duración.
La eclosión actual funciona a una frecuencia lo suficientemente alta como para garantizar la conducción continua. Las formas de onda del voltaje del motor VA y la corriente de refuerzo IA para la conducción continua se representan en la Figura 5.41 (b). Durante el período en el período del transistor, 0 ≤ t ≤ tonel, el voltaje del terminal del motor es V.


La operación se describe por


En este intervalo, la corriente de refuerzo va de IA2 a IA2. Dado que el motor está conectado a la fuente durante este intervalo, se llama intervalo de servicio.

En t = tono, TR se detiene. Corriente del motor Las ruedas libres a través del diodo DF y el voltaje del terminal del motor son cero durante el intervalo ≤ t ≤ T.

La corriente del motor disminuye de IA2 a IA1 durante este intervalo.
La tonelada de informe de intervalo de función en el período t -chopper se denomina informe de servicio o ciclo de servicio (δ). Entonces

En la Figura 5.41 (b)

La ecuación (5.2) y (5.7) también son aplicables aquí

Ecuaciones. (5.7), (5.8). y (5.114)

La naturaleza de la característica del par de velocidad se representa en la Figura 5.43.
Frenado regenerativo:
En la Figura 5.42 (a) se ilustra el control de los helicópteros del motor CC excitado por separado para el funcionamiento del frenado regenerativo. El transistor TR funciona periódicamente con un período T y un período de tonelada.
Las formas de onda del voltaje del motor VA y la corriente de refuerzo IA para la conducción continua se representan en la Figura 5.42 (b). Por lo general, se agrega una inductancia externa para aumentar el valor de la. Cuando TR se enciende, los aumentos de IA1 a IA2.
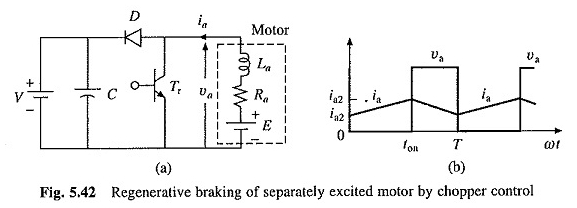
La energía mecánica convertida en electricidad por el motor, que ahora funciona como generador, aumenta en parte la energía magnética almacenada en la inductancia del circuito de refuerzo y el resto se disipa en la resistencia y el transistor del marco.
Cuando TR está discapacitado, la corriente de refuerzo pasa a través del diodo D y la fuente V, y va de IA2 a IA1. La energía electromagnética almacenada y la energía suministrada por la máquina se suministran con la fuente.
El intervalo 0 ≤ t ≤ tono ahora se llama intervalo de almacenamiento de energía y intervalo de toneladas ≤ t ≤ t el intervalo de servicio. Si δ se define nuevamente como el informe del intervalo de servicio en el período t, entonces

En la Figura 5.42 (b)

y Figura 5.42 (a)

Dado que se invierte
![]()
Ecuaciones. (5.8), (5.118) y (5.119)

La naturaleza de la característica del par de velocidad se representa en la Figura 5.43.

Máquina y frenado regenerativo:
Circuitos de tolva. 5.41 y 5.42 se pueden combinar para obtener un helicóptero dos cuadrantes en la Figura 5.44, que pueden proporcionar operaciones de frenado de manejo y regeneración en el frente. El transistor TRL con el diodo D1 forma un circuito helicoputivo similar al de la FIG.
5.41 y, por lo tanto, proporcionar control para la operación de los automóviles directos. El transistor TR2 con el diodo D2 forma un circuito helicoputivo similar al de la Figura 5.42 y, por lo tanto, proporciona un control para una operación de frenado delantero.
Por lo tanto, para la operación de conducción, se verifica el transistor TRL y para la operación de frenado, se controla el transistor TR2. El cambio en el control de TRL a TR2 va de la operación del automóvil a la frenado y viceversa.
En los dispositivos de servicio donde es necesario la transición rápida del automóvil al frenado y viceversa, TRL y TR2 se controlan simultáneamente. En un período T, TRL recibe una unidad de puerta de 0 a ΔT y TR2 recibe una unidad de puerta de ΔT a T, donde δ es el informe de servicio para TRL.
En consecuencia, desde el motor 0 a ΔT está conectado a la fuente a través de TRL o D2, dependiendo de si la corriente del motor IA es positiva o negativa. Desde este período, durante este período, la tasa de cambio actual siempre es positiva.
Del mismo modo, de ΔT a T, el refuerzo del motor está cortado por D1 o TR2 dependiendo de si la IA es positiva o negativa y durante este período, la tasa de cambio actual siempre es negativa. El voltaje del terminal del motor y los wavelems de onda de corriente se representan en la Figura 5.44 (b).
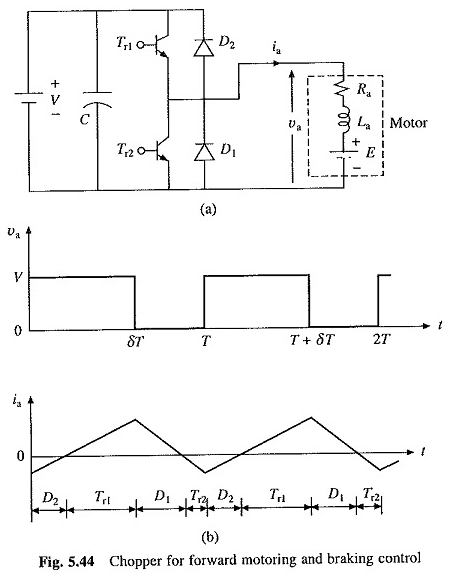
En la Figura 5.44 (b)

La ecuación anterior sugiere que la operación del motor (+ ve ia) tiene lugar cuando Δ> (e / v) y la operación de frenado regenerativo tienen lugar cuando Δ <(e / v) y la transición del automóvil al frenado y viceversa ocurre cuando δ = (e / v).
Las ecuaciones anteriores son similares a las obtenidas para el helicóptero en la figura (5.41) y, por lo tanto, teniendo en cuenta los mismos números
Frenado dinámico:
El circuito de frenado dinámico y sus wavelems están representados en la Figura 5.45. Durante el intervalo 0 ≤ t ≤ ton, el AI aumenta de IA1 a IA2. Parte de la energía generada se almacena en inductancia y el descanso se disipa en RA y TR. Durante el intervalo tonelado ≤ t ≤ t, las disminuciones de IA2 a IA2.
Las energías generadas y almacenadas en la inductancia se disipan en la resistencia al frenado RB, RA y diodo D. El transistor TR controla la amplitud de la energía disipada en RB y, por lo tanto, controla su valor efectivo.

Si se supone que AI es un DC sin ondas, entonces la energía consumida en RB durante un ciclo operativo de los helicópteros es
![]()
Energía promedio consumida por RB

Valor RB efectivo

O

La ecuación (5.122) muestra que el valor efectivo de la resistencia al frenado se puede cambiar sin paso de 0 a Rb, ya que δ se controla de 1 a 0. Cuando la velocidad cae, δ se puede aumentar sin paso para reducir el motor a un torque máximo constante como se muestra en la Figura 5.8 por línea a tomar por cadena.