Control del rectificador del motor en la serie DC:
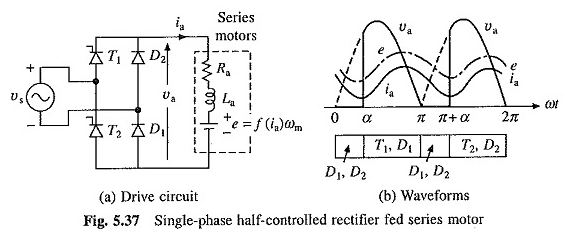
El control del rectificador de control de una sola fase del motor de la serie DC se usa en tracción. En la Figura 5.37 (a) se ilustra un control de rectificador monofásico medio controlado del motor de la serie DC. También se indica el circuito de motor equivalente.
Control de motores de cc
Dado que el EMF trasero disminuye con la corriente de refuerzo, la conducción discontinua ocurre solo en un rango de operación estrecho. Por lo tanto, se pasará por alto aquí. Los Wavelems de VA, AI y la parte posterior instantánea de la parte posterior para la conducción continua se representan en la Figura 5.37 (b).
Aunque, en el estado de equilibrio, las fluctuaciones de velocidad son insignificantes, E no es constante sino que fluctúa con la IA. Para una velocidad dada, E está vinculada a la IA por la curva de motorización del motor, que no es lineal debido a la saturación. Entonces

La operación del motor se describe mediante las siguientes ecuaciones para el servicio y los intervalos de rueda gratuitos, respectivamente, respectivamente,

Debido a la presencia del término F (IA), las ecuaciones. (5.103) y (5.104) son ecuaciones diferenciales no lineales y solo se pueden resolver digitalmente. Se obtiene un método de análisis simple cuando E se reemplaza por su valor promedio EA para que

O
Dado que la disminución a través de la inductancia, debido al componente DC de la corriente de refuerzo IA, es cero

Para la conducción continua, las ecuaciones se dan a medios ajustadores de una sola fase totalmente controlados y totalmente controlados. (5.93) y (5.83), respectivamente.
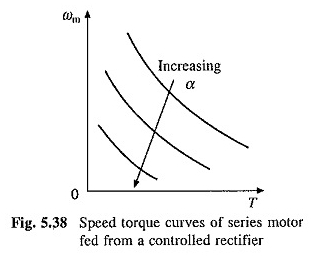
La secuencia de los siguientes pasos se usa para calcular la característica de la velocidad del pollo para un α dada que toma una explicación no lineal del circuito magnético: se elige un valor para la IA. El valor correspondiente de KA se obtiene de la característica de motorización del motor.
Para el valor conocido de α, la calculación va de la ecuación. (5.93) o (5.83), dependiendo del circuito rectificador utilizado. Ahora, ωm y T se obtienen de las ecuaciones. (5.107) y (5.108), respectivamente. La naturaleza de las características de la velocidad del engranaje para el lector en la Figura 5.37 (a) se representa en la Figura 5.38.
Control del motor FRACCIONARIO HP:

Debido al rectificador de medio costo de bajo costo de medio costo a bajo costo de la Fig. 5.39 (a), el uso de un solo tiristor, se usa comúnmente para controlar los motores CC universales fraccionales HP, CC y DC con imán permanente. Estos discos se utilizan en herramientas manuales y pequeños dispositivos domésticos.
El voltaje del terminal motor y los wavelems de onda de la corriente de refuerzo se representan en la Figura 5.39 (b). El lector opera es una conducción discontinua con un intervalo de corriente cero grande y una ondulación significativa.
En consecuencia, la efectividad es mala, la regulación de la velocidad es significativa y la velocidad puede fluctuar alrededor de su valor promedio cuando la inercia es baja. A veces se agrega un diodo de rueda libre para reducir la duración del intervalo de corriente cero.
Los motores universales también pueden ser controlados por un controlador de tensión AC Triac como se muestra en la Figura 5.40 (a). El TRIAC se dibuja en α y (π + α). Ahora, el refuerzo de la máquina lleva la corriente alterna (Fig. 5.40 (b)).
Debido a la reducción de la duración del intervalo de corriente cero, el lector tiene fluctuaciones de velocidad insignificantes y una menor regulación de velocidad.