Control del rectificador monofásico totalmente controlado del motor CC:
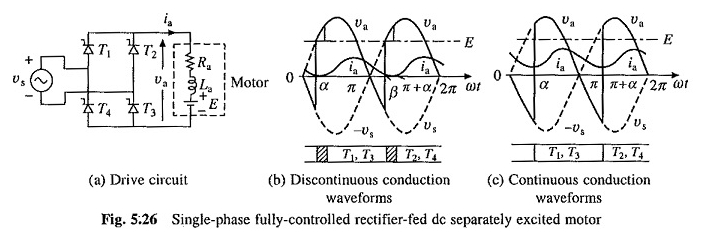
El control del rectificador monofásico totalmente controlado del motor CC se ilustra en la Figura 5.26 (a). El motor está indicado por su circuito equivalente. La comida de campo no se muestra. Cuando se requiere el control del campo, el campo se alimenta desde un rectificador controlado, si no desde un rectificador no controlado. El voltaje de entrada se define por
Rectificador monofasico controlado

En un ciclo de voltaje de fuente, los tiristores T1 y T3 reciben señales de puerta de α a π, y los tiristores T2 y T4 reciben señales de puerta (π + α) a 2π. Cuando la corriente de refuerzo no fluye continuamente, el motor funciona en una conducción discontinua.
Cuando la corriente circula continuamente, la conducción sería continua. El lector consideró, trabaja principalmente en una conducción discontinua. La conducción discontinua tiene varios modos de operación.
El método de análisis aproximado pero simple se obtiene cuando solo se tiene en cuenta el modo dominante de conducción discontinua.
El voltaje del terminal motor y las ondas de onda de corriente para los modos de conducción discontinua y conducción continua dominante se representan en las Figs. 5.26 (b) y (c).
En el modo de conducción discontinua de la fase monofásica totalmente controlada del motor CC, la corriente comienza a fluir con la implementación de los tiristores T1 y T3 en ωt = α. El motor está conectado a la fuente y su voltaje terminal es igual a vs.
La corriente, que fluye contra los dos, E y el voltaje de la fuente después de ωt = π, cae de cero a β. Debido a la ausencia de desactivación de las actuales T1 y T3. El voltaje del terminal del motor ahora es igual a su voltaje inducido E. Cuando los tiristores T2 y T4 se tiran a (π + α), comenzará el siguiente ciclo del terminal del motor.
En el modo de control de conducción continua del rectificador monofásico totalmente controlado del motor de corriente continua, una corriente positiva circula a través del motor, y T2 y T4 están en conducción justo antes de α. La aplicación de pulsos de la cuadrícula se activa en tiristores sesgados en el frente T1 y T3 a α.
La conducción de los sesgos inversos T1 y T3 T2 y T4 los desactivan. Un ciclo VA se termina cuando T2 y T4 se activan en (π + α) causando la desactivación de T1 y T3.
Dado que la corriente de refuerzo no es perfecta DC, el par del motor fluctúa. Dado que el par fluctúa a una frecuencia de 100 Hz, la inercia del motor es capaz de filtrar fluctuaciones, lo que proporciona una velocidad casi constante y una ondulación E.
Conducción discontinada:
En un control de rectificador monofásico totalmente controlado del voltaje del terminal de control del motor VA, el lector funciona a dos intervalos (Fig. 5.26 (b)):
- Intervalo de servicio (α ≤ ωt ≤ β) cuando el motor está conectado a la fuente y VA = vs.
- Intervalo de corriente cero (β ≤ ωt ≤ π + α) cuando ia = 0 y VA = E.
El funcionamiento del lector se describe mediante las siguientes ecuaciones: 
Solución de ecuación. (5.72) tiene dos componentes, uno debido a la fuente Ca (VM / Z) sin (ωt – φ), y otros debido a la EMF ( – E / RA). Cada uno de estos componentes tiene un componente de transición. O estos representados por un solo expositor k1e-t / τa, luego

O

y τa viene dada por la ecuación. (5.25).
La constante K1 puede evaluarse sometiendo la ecuación. (5.74) En el estado inicial IA (α) = 0. Reemplace el valor de K1 así obtenido en la ecuación. (5.74) Renderizado

Desde Ia (β) = 0, de la ecuación. (5.77)

β puede evaluarse por solución iterativa de la ecuación. (5.78).
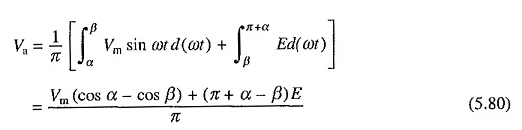
Dado que la caída en la tensión a través de la inductancia del refuerzo debido al componente CC de la corriente de refuerzo es cero
![]()
Donde están y los componentes de CC del voltaje y la corriente de refuerzo son respectivamente respectivamente. En la Figura 5.26 (6)
La corriente de refuerzo consiste en componente DA y armónicos. Cuando el flujo es constante, solo el componente CC produce un par regular. Los armónicos producen componentes de torque alternativos, cuyo valor promedio es cero. Por lo tanto, el par del motor siempre es dado por la ecuación. (5.7). Ecuaciones. (5.7), (5.8), (5.79) y (5.80)

El borde entre la conducción continua y discontinua se alcanza cuando β = π + α. Sustituyendo β = π + α en la ecuación. (5.78) proporciona el valor crítico de la velocidad ωmc que separa la conducción continua de la conducción discontinua para un α dado como

Conducción continua:
En la Figura 5.26 (c)

Ecuaciones. (5.7), (5.8), (5.79) y

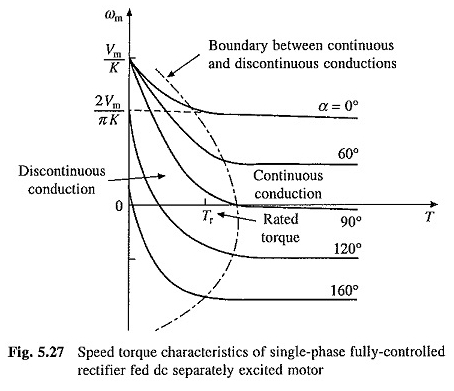
Las curvas de par de velocidad para el lector están representadas en la Figura 5.27. La operación ideal sin carga se obtiene cuando ia = 0. Cuando los dos pares de tiristor (T1, T3) y (T2, T4) no se administran, IA será cero. Esto sucederá cuando E> vs durante todo el período para el que están presentes impulsos cansados.
Por lo tanto, cuando α <π / 2, E debe ser mayor o igual a la VM y cuando α> π / 2, E debe ser mayor o igual a VM sin ωt. Por lo tanto, no se da velocidad de carga por

El voltaje terminal promedio máximo (2 VM / π) se elige igual al voltaje nominal del motor. Ideal no la velocidad de carga del motor cuando se alimenta por un voltaje directo perfecto del valor nominal será (2 VM / πk).
Es interesante observar que la velocidad máxima sin carga con el control del rectificador es (π / 2) veces este valor. El borde entre la conducción continua y discontinua está representada por una línea punteada (Fig. 5.27).
Para parejas menos que calificadas, una unidad baja funciona principalmente en una conducción discontinua. En la conducción continua, las líneas rectas paralelas son líneas paralelas, cuya pendiente, según (5.84), depende de la resistencia al circuito de refuerzo de RA.
El efecto de la conducción discontinua es hacer que la regulación de la velocidad sea pobre. Este comportamiento puede explicarse a partir de los wavelems de la figura 5.26 (b) y (c). En la conducción continua, para un α dado, cualquier aumento en el torque está bajando Ωm y E para que la AI y la T puedan aumentar.
El voltaje terminal promedio permanecerá constante. En la conducción discontinua, cualquier aumento en la pareja y el aumento acompañado de IA conduce a un aumento en β y una caída en AV. Por lo tanto, la velocidad cae por una mayor cantidad.
El lector opera en los cuadrantes I (delantero del automóvil) y IV (frenado regenerativo inverso). Estas operaciones pueden explicarse de la siguiente manera:
De la ecuación. (5.84), bajo la hipótesis de conducción continua, la tensión de salida de CC del rectificador varía con α como se muestra en la Figura 5.28 (a). Cuando trabaja en el cuadrante I, Ωm es positivo y α ≤ 90 °; Y las polaridades de VA y E se representan en la Figura 5.28 (b).
Para una IA positiva, esto lleva al rectificador a proporcionar energía y el motor que la consume, lo que le da a un automóvil hacia adelante. Las polaridades de E, Ai y Goes para el funcionamiento del cuadrante IV se representan en la Figura 5.28 (c). E se ha revertido debido a la inversión de Ωm.
Como la IA siempre está en la misma dirección, la máquina funciona como generador que produce un par de frenado. Además, debido a α> 90 °, VA es negativo, lo que sugiere que el rectificador ahora toma el poder de los terminales CC y lo transfiere al sector de CA.
Esta operación del rectificador se llama reversión y el rectificador funcionaría como inversor. Dado que el suministro generado se proporciona en la fuente de esta operación, es un frenado regenerativo.

Dos capacidad de operación del cuadrante del lector solo se pueden usar con cargas de revisión u otras cargas activas que pueden conducir el motor en la dirección opuesta.
En el funcionamiento normal con dos cuadrantes de un motor, se necesita un mango directo (cuadrante I) y un frenado delantero (cuadrante II) que el lector no puede suministrar en la Figura 5.26 (a).