Controlador de tambor para el motor de la serie DC:
Los motores de la serie DC a menudo se usan en grúas, ascensores, tranvías y otras aplicaciones, donde el motor está bajo el control directo de un operador. En estas aplicaciones, las variaciones frecuentes de inicio, velocidad, parada e inversión pueden ser necesarias.
Se emplea un controlador explotado manualmente, más robusto que un reostato inicial, llamado controlador de batería.
El controlador del tambor tiene la forma de un tambor giratorio que tiene segmentos que entran en contacto con los puntos fijos. El controlador de velocidad de este tipo se ilustra en la Fig.

1.62 en la que K es una bobina de frenado de arco: EM es un electrodomático de frenado; FLS es un interruptor de rotación en una dirección y RLS es un interruptor para la rotación en la dirección opuesta. El controlador del tambor tiene seis posiciones para el frente y seis posiciones para la rotación opuesta del motor.
Las posiciones de trabajo del controlador están representadas por líneas puntiagudas verticales. El EM electro-amable está conectado en paralelo con el motor y libera el motor al arranque. Cuando el motor está desconectado, se frena mecánicamente.

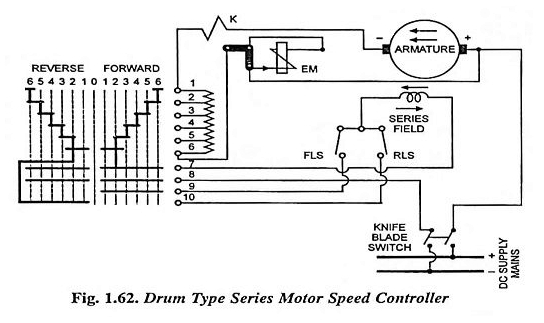

Ahora, cuando el interruptor de la cuchilla del cuchillo está cerrado y el controlador se coloca en la posición delantera 1, las conexiones están a lo largo de la línea vertical. En esta posición, los segmentos establecen contactos con puntos fijos 6 y 7, 8 y 9.
En esta posición, la corriente circula desde la barra de bus + VE mediante el bobinado en el refuerzo del motor, la bobina de frenado Arc K, todo el arranque 1-6, los puntos fijos 6 y 7 a través de segmentos del controlador, el devanado de campo de la serie, el interruptor del límite delantero, los puntos fijos 9 y 8 a través de los segmentos del controlador y regresan a la barra de bus negativa.
En la segunda posición hacia adelante, los segmentos del controlador del tambor entran en contacto con los puntos fijos 5 y 6, lo que pone una parte de la resistencia inicial del circuito, de modo que aumenta la velocidad del motor de la serie.
En las siguientes posiciones de transferencia, el tercer, 4 y 5, los pasos adicionales en las resistencias iniciales han salido del circuito y finalmente en la sexta posición, todas las resistencias iniciales son cortas y el motor alcanza una velocidad máxima.
En las seis posiciones hacia adelante, la dirección de la corriente en el refuerzo, así como en el devanado del campo en serie, es la misma (de derecha a izquierda), como se muestra en la Figura 1.62.
Pero en la posición opuesta, la corriente circula desde la barra de bus + VE al enrollar el refuerzo, la bobina de frenado del arco K, todas las resistencias iniciales 1-6, los puntos fijos 6 y 10 a través de los segmentos del controlador, el interruptor de límite opuesto RLS, el devanado de campo de la serie, los puntos fijos 7 y 8 a través de los segmentos del controlador y regresan a la barra de bus.
En consecuencia, es obvio que en las posiciones de inversión, la dirección del flujo de corriente en el devanado del refuerzo permanece sin cambios, mientras que lo opuesto a través del devanado del campo de la serie, revirtiendo así la rotación del motor.