Control de velocidad en el bucle de motor CC cerrado:
El control de los convertidores de circuito cerrado del motor CC (rectificadores y helicópteros) se construyen utilizando dispositivos semiconductores, que tienen una capacidad térmica muy baja. Por lo tanto, sus corrientes transitorias y estables son las mismas.
Los motores CC pueden transportar la corriente nominal de 2 a 3.5 veces durante las operaciones de transición a corto plazo, como el inicio, el frenado e inversión. La corriente es alta, el par es alto y la respuesta de transición es mayor.
Por lo tanto, cuando se requiere una respuesta rápida durante las operaciones de transición, la corriente del motor puede tener un valor máximo autorizado. La clasificación del convertidor se elige igual al valor máximo autorizado de la corriente del motor.
Debido a la notación actual significativa, el costo del convertidor ahora será más alto. Cuando no se requiere la respuesta de transición rápida, se elige la nota actual del convertidor igual a la costa de corriente del motor para mantener el costo del convertidor bajo.
Los discos de bucle abierto se proporcionan con un control de límite actual y para proteger al convertidor de las sobrecargas de corriente.
El control de la velocidad de bucle cerrado de los diagramas de motor CC se suministra con un bucle de control de corriente interna para limitar la corriente dentro de un límite de seguridad y también para acelerar y desacelerar al lector en el máximo autorizado y parear durante las operaciones de transición.

Sin embargo, debe tenerse en cuenta que la desaceleración en el par corriente o máximo será posible cuando el convertidor utilizado también tenga la capacidad de operaciones de frenado.
También se puede observar que el rectificador controlado se usará cuando el suministro sea CA y el helicóptero se usará cuando la fuente de alimentación sea DC.
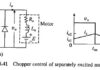
El lector explica el enfoque básico para el control de la velocidad debajo de debajo y por encima de la velocidad en la Figura 5.47. El lector usa el bucle de control de corriente interna y el bucle de velocidad al aire libre.
Dicho lector funcionará a una corriente de campo constante y un voltaje de interrupción variable por debajo de la velocidad básica, y a un voltaje de refuerzo constante y una corriente de campo variable por encima de la velocidad básica. Por lo tanto, el refuerzo y el campo son alimentados por rectificadores totalmente controlados.
Dado que el refuerzo es alimentado por un rectificador totalmente controlado, el frenado delantero no es posible; El lector se desacelerará solo al par de carga. Debido al control de la corriente interna con el limitador actual, la aceleración se llevará a cabo informada y al par máximo autorizado.
En el convertidor de semiconductores, la Fed conduce al controlador PI (proporcional e integral) a menudo se usa porque filtra el ruido que de otro modo puede convertirse en un problema. El controlador PI también da una buena precisión al estado de equilibrio.

Primero examinemos la operación a la velocidad básica. En el bucle de control de campo, el EMF E se compara con un voltaje de referencia E * que se elige entre 0.85 y 0.95 del voltaje de refuerzo nominal.
El valor más alto se utiliza para motores de resistencia al circuito de refuerzo bajo. Para velocidades por debajo de la velocidad básica, el controlador de campo de saturación debido a un gran valor de error EF. El ángulo del premio del rectificador de campo αF se mantiene en cero, aplicando voltaje nominal en el suelo.
Esto garantiza la corriente de campo nominal para la operación del motor por debajo de la velocidad básica (ΩMB). Cuando la referencia de velocidad aumenta de ω * m1 a ω * m2 (Ω * m2 <ωm1) Debido a un error de velocidad de alta velocidad, el limitador de corriente satura y define la referencia actual al valor máximo autorizado.
El lector acelera el par actual y máximo disponible. Cuando la velocidad alcanza cerca de Ω * m2, se detalla el limitador de corriente y la conducción se ajusta a la velocidad ωm2 y la corriente que da un par motor igual al par de carga.
Si la referencia de velocidad se reduce a ω * M1, la referencia de corriente se define a cero y el lector está desacelerado debido al par de carga.
Cuando ωm se vuelve ligeramente más bajo que ω * m1, la corriente del motor fluye nuevamente y finalmente conduce a reglas a la velocidad ωm1 y la corriente para la cual el par motor equilibra el par de carga. Para un error de velocidad negativa, i * a se define en cero porque el I * A negativo es sin uso.
Sin embargo, cobrará el controlador PI. Cuando la velocidad de referencia aumenta nuevamente, lo que hace que la velocidad al error positivo, el controlador PI cargado tarda más en responder, lo que hace que la respuesta de los transitorios sea más lento.
Ahora permita que la operación se examine por encima de la velocidad básica. Cerca de la velocidad básica, el controlador de campo está saturado. Ahora, si la velocidad de referencia se define para una velocidad mayor que la velocidad básica, la referencia actual se define al valor autorizado máximo.
El ángulo de tiro del rectificador de refuerzo αA se reduce para aumentar inicialmente. El motor se acelera, EF aumenta, EF disminuye, reduciendo la corriente de campo.
Por lo tanto, la velocidad del motor continúa aumentando y la corriente de campo continúa disminuyendo hasta que la velocidad del motor se vuelve igual a la velocidad de referencia. Dado que el error de velocidad ahora será pequeño, volverá a un valor cercano al valor original.
Por lo tanto, el control de velocidad por encima de la velocidad básica se obtiene mediante el control de campo con el voltaje de refuerzo mantenido cerca del valor nominal. En la región de control de campo (velocidad básica arriba), el lector reacciona muy lentamente debido al gran valor del tiempo constante.