Motor CC sin cepillos:
El término motor CC sin escobas se aplica a numerosas configuraciones de motores sincrónicos de CA en los que se utiliza el control de semiconductores para controlar las corrientes del estator, como el par máximo, se obtiene a una velocidad dada.
En un motor convencional, el contactor mecánico, el interruptor, mantiene el desplazamiento de grados a 90 ° de grados entre los campos magnéticos del rotor y el estator para proporcionar el par requerido.
Teóricamente, las funciones del estator y el rotor de una máquina se pueden invertir, lo que coloca el sistema de campo en el rotor.

No hay ventaja que se gane si se usa una conmutación convencional, porque los cortes de interruptores son fijos y el engranaje del pincel debe girar a la velocidad del campo del rotor.
Cambiar a semiconductores por transistores o tiristores, desencadenados por sensores de posición, puede reemplazar el engranaje de pinceles con un conmutación completamente electrónico, dominando las máquinas pequeñas por una preciosa planta de control.

En este método, cada fase del devanado del estator es secuencialmente energético por un transistor de potencia (o tiristor) mediante una señal del sensor de posición colocado en el rotor.

Debido a la luz de fondo de la posición del rotor de tiristores / transistor, el campo del estator y el rotor todavía está en sincronismo porque la frecuencia de activación se ajusta automáticamente a la velocidad del motor. La longitud de los tiempos de los transistores determina la amplitud del par del motor.
Por lo tanto, mediante circuitos electrónicos, la escoba sin motores de escoba se puede verificar para obtener una operación de par constante y variable.
Los motores CC sin escoba, mientras que generalmente son más caros para la misma nota de KW, que las fallas y los motores cepillados tienen ciertas ventajas en comparación con los motores convencionales.
Ventajas del CC sin motor de escoba:
- Requieren poco o ningún mantenimiento.
- Tienen una vida operativa mucho más larga.
- No existe riesgo de explosión o posibilidad de radiación de RF debido al arco.
- No producen cepillo ni partículas ni cambian de gas como subproductos operativos.
- Son capaces de operar sometidos en fluidos, gases combustibles e incluso pueden sellarse bien.
- Generalmente son más efectivos que los sirvientes de CC o motores de CC convencionales.
- Proporcionan una respuesta más rápida y un par de salida bastante lineal en comparación con la característica de la corriente de entrada, que se presta a las aplicaciones de servomotor.
Principio de diagrama y motor CC operativo sin escobas:
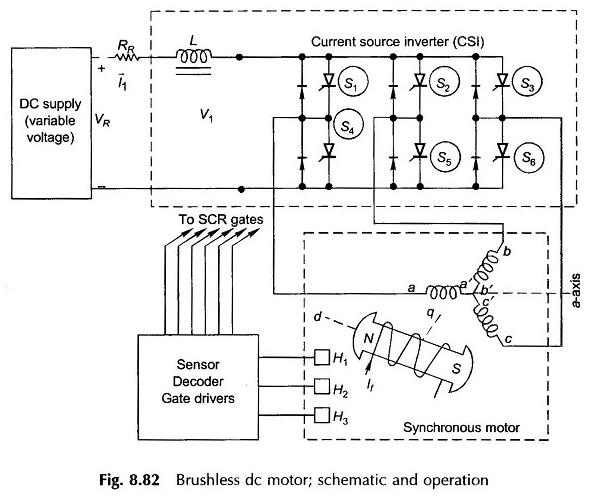
El diagrama esquemático de un motor CC de escoba se ilustra en la Figura 8.82. También muestra las tres fases del estator (refuerzo) y el rotor con ejes D y Q indicados.
El estator está conectado a una fuente de corriente de voltaje variable a través de una inductancia y un inversor que incluye seis SCR (S1 a S6). En lugar de los SCR, el transistor de potencia o el FET podrían usarse de acuerdo con la potencia del motor.
Los diodos están conectados a través de los SCR para protegerlos de la tensión L (DI / DT) inducida en la bobina de refuerzo que experimenta conmutación.
Los sensores de posición colocados en el rotor proporcionan una señal a los decodificadores de sensores y los controladores de la cuadrícula que causan una secuencia de secuencia en secuencia para estar en sincronismo con la posición mecánica del rotor.
Los campos del estator y el rotor así se bloquean y permanecen en sincronismo a cualquier velocidad del rotor.
Las corrientes de fase ideales son los impulsos de ± I duraron a 120 °, seleccionan cada mitad y se movieron entre sí a 120 ° Electo fase a fase como se indica en la Figura 8.83. Las formas de corriente real difieren de las ondas de corriente rectangulares ideales por aumento y caída gradual.
Tal inversor donde la corriente fluye en forma de impulsos de corriente constantes se conoce como el seritor de corriente (CSI).

La secuencia de disparo del inversor como se muestra en la Figura 8.83 se deriva inmediatamente de las formas de corriente de fase. Para esta secuencia de disparo SCR de 120 ° o 60 °, se generan códigos de sensor espaciados seleccionados utilizando sensores de luz sensibles o efecto de pasillo.
La Figura 8.84 ilustra el caso de un espacio de 120 ° en el que estos sensores sensibles a la luz se representan a 120 ° fijos, obteniendo luz de una fuente de luz fija.
El rotor transporta un disco de interruptor con un corte de 180 ° de modo que cuando se ejecuta con el rotor, los sensores de luz reciben una luz de 180 ° y están oscuros durante 180 °. Los sensores producen la lógica «1» mientras reciben una luz y una lógica «0» durante la oscuridad.
Es fácil ver que los tres sensores (fijos) y el disco de comunicación (rotativo con el rotor) producen una secuencia de código del sensor como se indica en la Figura 8.83 de la cual los circuitos electrónicos generan impulsos de gatillo para extraer SCR en la secuencia como se indica en la figura.
La posición relativa del disco de comunicación se puede ajustar a los postes del rotor (eje Ieewrt D y Q). Para la posición instantánea del rotor (con los discos fijos como se indica), observamos que el código del sensor simplemente irá de 101 a 100.
La fase «A» está en el medio de su impulso actual cuando la corriente va de la fase B a C. En este momento, el campo del estator resultante F̅1 está orientado a lo largo del Eje A como se muestra en la Fig.
8.83 (la dirección positiva de la corriente automotriz se opone a la dirección positiva del FMF inducido); Verifique la fase «A» aplicando la regla de la mano derecha de Fleming. El polo norte del estator se orienta a lo largo del eje A.

Este Polo Norte empuja el rotor norte para crear un par de automóviles (el ángulo entre el rotor y el estator N-APLES es β). Se puede hacer un marcador de índice en el disco del interruptor que siempre apunta al estator del norte, mientras que el campo del estator se ejecuta en sincronismo con el rotor.
Este índice hace un ángulo γ con el eje Q del rotor (eje d finales de 90 °). Obviamente (β + γ) = 90∘. El ángulo se puede ajustar moviendo el disco de comunicación en el eje unido a los postes del rotor.

En la Figura 8.85 se ilustra un motor de corriente continuo del imán permanente que usa sensores de efecto de habitación con espacio electoral de 60 °. Los sensores generan lógica 1 ‘cuando se exponen a N polo y «0» de lo contrario. La secuencia del código del sensor para esta disposición se ve fácilmente y se da en la Figura 8.83.
Con H3 ubicado a lo largo del eje A, el código del sensor a la posición del rotor indicada va de 000 a 001, lo que significa que la corriente está en el medio de la conducción para la fase «A» y va de B a C. Por lo tanto, F1 se dirige a lo largo del eje A o el estator N Pole está a lo largo del eje G IE
γ = 0 (ver Fig. 8.84). Los motores magnéticos permanentes generalmente se ajustan para este valor de γ (esto corresponde a β = 90 °, mejor para la producción de par).
Diagrama de circuito del motor CC sin cepillos:
El modelo de circuito de Novotny-Abbas de un CSI alimentado con motores CC sin escobas se dibuja en la Figura 8.86. Las corrientes (equilibradas) que fluyen hacia la máquina sincrónica de la máquina CC sin cepillos configurados en la Figura 8.82 son pulsos rectangulares ACC como se indica en los wavelems de la Figura 8.83.
Las corrientes reales son impulsos algo redondeados. Nuestro análisis se basará en las corrientes de corriente de CA fundamental y las corrientes armónicas se ignorarán. Estos producen campos de airpips armónicas espaciales que, como campo no estacionarios, el campo del rotor produce un par neto cero.
Para irse
I1 = corriente alimentada por el inversor por la fuente de DC
ENTONCES
Im (fase actual rms = corriente fundamental
= (√6 / π) i1; puede mostrarse por la serie de Fourier
En la Figura 8.86 (a), el modelo de máquina sincrónica es el habitual caracterizado por la reactancia del eje rectual síncrono XD y la excitación EMF EF donde XD y EF varían directamente con la velocidad que gobierna la frecuencia de funcionamiento.
La amplitud EF está, por supuesto, vinculada a la corriente del campo del rotor por la característica de la magnetización. El diagrama de fase correspondiente se dibuja en la Figura 8.86 (b) donde IM, la corriente de fase, se dibuja en V (Voltaje de salida de Ca / voltaje terminal de la máquina sincrónica) por ángulo φ. La operación principal actual se lleva a cabo porque contribuye a la extinción de la corriente en la conmutación SCR.

Ahora crearemos el modelo de CA de CSI con las condiciones:
- Iae = im
- El parámetro del circuito modelo es la resistencia RAE.
- EGE e IAE están en fase.
Estas condiciones asegurarán que esta parte del modelo realmente represente la máquina CC equivalente.
También vemos en la Figura 8.84 que el ángulo de fase entre i̅m = ̅ae y EF es de hecho el ángulo γ. Ahora asimilando la potencia convertida por fase de la máquina síncrona a la de la máquina DC equivalente que tenemos

Traducir este resultado en el diagrama de fase (Fig. 8.86 (b)), queda claro que V y EGE están vinculados por una reactancia ficticia Xe como se indica en el circuito de la Figura 8.86 (a). Ahora obtendremos la relación para el TEV y RAE. Descuidar las pérdidas de los inversores

Imagina un cortocircuito en EGE, es decir, EGE = 0, tenemos
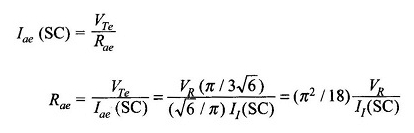
Pero
Vr / i1 (sc) = rr; Resistencia del rectificador interno que suministra al inversor
ENTONCES
![]()
Características del motor CC sin pinceles:
En referencia a la Figura 8.84 (c)
![]()
Como ya se muestra en la ecuación. (8,121)
![]()
Pero EF se puede escribir como
![]()
O
- ΦF = flujo / polo causado por actuar solo.
Sustituyendo valores en la ecuación. (8.124)
![]()
O

Con la excepción del efecto de COS γ, esta ecuación es la misma que en la máquina DC convencional.
La pareja desarrollada está dada por
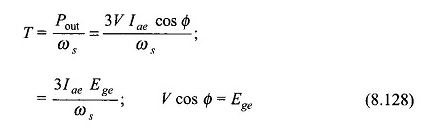
Usando la ecuación. (8,126), obtenemos
![]()
Si la característica de la magnetización es supuestamente lineal
![]()
Las ecuaciones de velocidad y par son entonces
En un motor sincrónico, debido a que la corriente de campo se reduce, su PF se vuelve más retrasado. Pero en un motor CC sin cepillos (que es un motor sincrónico con retroalimentación en la posición del rotor), la disminución de la corriente de campo si provoca un aumento en la velocidad de acuerdo con la ecuación.
(8,131) como en un motor CC convencional. Esto puede explicarse cualitativamente por el siguiente razonamiento. En referencia a la Figura 8.86 como si se redujera, EF y, por lo tanto, se reducen y que RAE es muy bajo, esto causa un aumento desproporcionado en IAE = IM.
El resultado es la aceleración del rotor. El aumento en la velocidad del rotor contrarresta la reducción del EF y que IM aumenta a medida que la caída de voltaje IMXD aumenta con el aumento de la frecuencia de funcionamiento. El resultado es una operación regular a una velocidad nueva y más alta a menos en mente o incluso tarde.
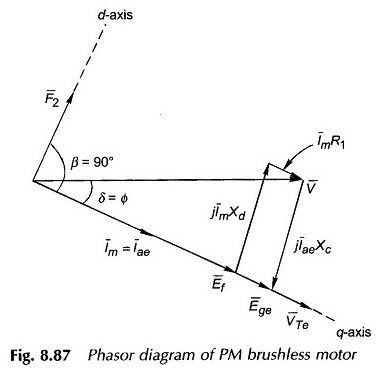
Motor DC sin escobas PM:
El PM Small Continuow Current Motor es generalmente tipos de PM. En dicho rotor del motor, el MMF F2 permanece fijo y también el ángulo γ en estas máquinas se establece en cero, lo que significa que F2 y F1 (MMF de refuerzo) se mueven por un ángulo de 90 ° (mejor para el par desarrollado).
Además, la resistencia al devanado de la fase R1 no es insignificante y, por lo tanto, debe agregarse a RAE en el modelo DC. El diagrama de fase para γ = 0 se dibuja en la Figura 8.87 en la que se realizan las siguientes observaciones
- Xc = reactancia capacitiva = xd (en amplitud).
- El ángulo de PF está retrasado.
La relación de las ecuaciones. (8,127) y (8.129) para la velocidad y el par se aplican con la excepción de la ecuación. (8.124) Ahora cambia como
![]()