Tipos de motores de CC:
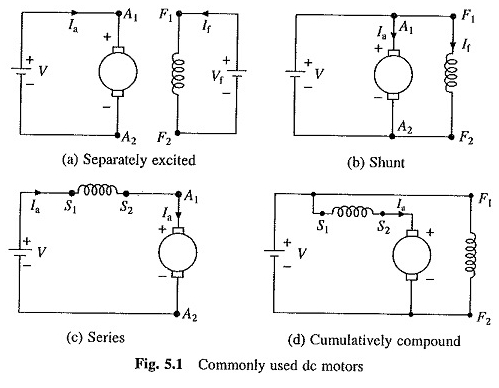
Los tipos de motor de corriente comúnmente utilizados se representan en la Figura 5.1. En un motor excitado por separado, las tensiones de campo y refuerzo se pueden controlar independientemente del otro. En un motor de derivación, el campo y el refuerzo están conectados a una fuente común.
Motores dc (modelo motor dc, motor en serie, motores en serie)
En el caso de una serie en serie, la corriente de campo es la misma que la corriente de refuerzo y, por lo tanto, el flujo de campo depende de la corriente de refuerzo.
En un motor compuesto acumulativo, la fuerza magneto-motiva del campo en serie es una función de la corriente de refuerzo y está en la misma dirección que MMF del campo de derivación.
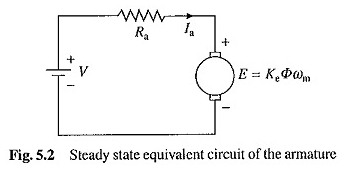
El circuito equivalente al estado de equilibrio del marco de una máquina CC se ilustra en la Figura 5.2. La resistencia a la AR es la resistencia del circuito de refuerzo.
Para los motores excitados por separado y de derivación, es igual a la resistencia del refuerzo del refuerzo y para los motores en series y compuestos, es la suma de la resistencia del devanado del marco y el campo. Las ecuaciones básicas aplicables a todos los tipos de motor CC son

O
Φ – es el flujo por polo, webers;
Ia – la corriente de refuerzo, a;
V – la tensión del r -RIP;
RA – La resistencia del circuito inusual, ohmios;
Ωm: la velocidad del refuerzo, rad / seca;
T – el par desarrollado por el motor, nm; Y
KE – El motor constante.
De la ecuación. (5.1) a (5.3) 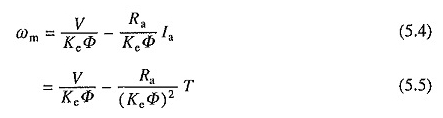
Shutors y excitado por separado:
En el caso de la derivación y los motores excitados por separado, con una corriente de campo constante, el flujo puede suponerse constante. Para irse
![]()
Luego de las ecuaciones. (5.1), (5.3) y (5.4) a (5.6)

Las características de la velocidad y las crushes de corcho de un motor excitado por separado para el voltaje terminal y el campo completo se representan en la Figura 5.3. La curva de velocidad Torca es una línea recta.
La velocidad de carga libre de carga Ωm0 está determinada por los campos de refuerzo y excitación de campo. La velocidad disminuye a medida que aumenta el par y la regulación de la velocidad depende de la resistencia del circuito de refuerzo (ecuación (5.10)). La caída habitual en la velocidad de la carga de carga completa, en caso de un motor de tamaño mediano,

es alrededor del 5%. Los motores excitados por separado se utilizan en aplicaciones que requieren buenas regulaciones de velocidad y velocidad ajustable.
Motor de la serie:
En los motores en serie, el flujo depende de la corriente de refuerzo. En la región característica de magnetización no saturada, se supone que φ es proporcional a la AI. Entonces,
![]()
Sustitución en ecuaciones. (5.3), (5.4) y (5.5) da
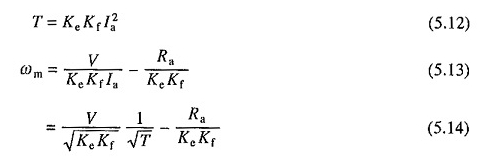
donde la resistencia al circuito del refuerzo de la RA es ahora la suma de las resistencias de devanado del refuerzo y el campo. Las características de Torca y Corque-Current de un motor en serie en el voltaje de campo nominal y completo se representan en la Figura 5.3.
Los motores de la serie son adecuados para aplicaciones que requieren un alto par de arranque y sobrecargas de torque pesado.
Dado que el par es proporcional a la corriente de refuerzo al cuadrado, para el mismo aumento en el par, el aumento en la corriente del motor es menor en comparación con el de un motor excitado por separado donde el par es proporcional al refuerzo.
Por lo tanto, durante las sobrecargas de torque pesadas y el arranque, la sobrecarga de energía en la fuente y la sobrecarga térmica del motor se mantienen limitadas a valores razonables. Según la ecuación. (5.14), Debido a que la velocidad varía inversamente como la raíz cuadrada del par, la máquina funciona a alta velocidad con carga de luz.
En general, la resistencia mecánica de un tipo de motor de corriente continua le permite funcionar hasta aproximadamente el doble de la velocidad nominal.
En consecuencia, el motor de la serie no debe usarse en los discos donde existe la posibilidad de que el par de carga se abandone en la medida en que la velocidad puede exceder el valor nominal dos veces.
Motor compuesto:
Las características de la velocidad de Torca y el cruce de corcho de un motor compuesto acumulativo también se representan en la Figura 5.3. La velocidad sin carga depende de la fuerza del campo de derivación y la pendiente de la característica sobre la fuerza del campo de la serie.
Los motores compuestos acumulativos se utilizan en aplicaciones donde se requiere una característica de caída similar a la de una serie en serie y, al mismo tiempo, la velocidad de carga debe limitarse a una apuesta segura; Los ejemplos típicos son los ascensores y los ganadores.
También se usa en aplicaciones de carga intermitentes, donde la carga varía de casi ninguna carga a cargas muy pesadas. En estas aplicaciones, se puede montar un volante en el eje del motor para la ecualización de la carga.
Además de la carga de ecualización en la fuente de alimentación, permite el uso de un motor más pequeño. La máquina de prensa es un ejemplo típico de este tipo de aplicación.
Las características de la Fig. 5.3, que se obtienen en el voltaje terminal nominal y en el campo completo, se conocen como características naturales de la velocidad de hendidura. La velocidad nominal (o carga completa) se conoce como velocidad básica.
Motor universal:
El motor Universal puede funcionar tanto en la alimentación de CC como de CA. Es esencialmente un motor de la serie DC, con algunas diferencias de construcción; que se introducen principalmente para obtener un rendimiento satisfactorio en AC. En el motor de la serie, el par depende del producto de la corriente del marco y el flujo de campo.
La inversión del voltaje terminal inverso tanto el refuerzo como el flujo de campo. Por lo tanto, la pareja se quedó en la misma dirección. Por lo tanto, cuando se alimenta de una fuente de CA, el motor de la serie produce un par unidireccional.
Aunque el torque fluctúa a una frecuencia de 100 Hz entre cero y su valor de cresta, la inercia del motor se suaviza sus fluctuaciones y el motor funciona a una velocidad uniforme.
Un motor simple de la serie DC no funciona bien en AC. La histéresis y las pérdidas de corriente de Foucault que ocurren en postes de campo y yugos reducen la eficiencia del motor y aumentan la carga térmica.
El flujo alterno produce grandes corrientes inducidas en las bobinas que son cortas por los pinceles durante la conmutación. Esto provoca una chispa excesiva al interruptor. El factor de potencia del motor es muy mediocre debido a una gran inductancia del campo y el refuerzo.
El motor Universal está especialmente construido para resolver estas limitaciones. Además del refuerzo, los postes de campo y los yugos también se enrollan para reducir las pérdidas de corriente de Foucault. La estratificación de alta permeabilidad en el acero de silicio se usa para reducir la pérdida de histéresis.
Se usa un devanado compensatorio en serie con el refuerzo para reducir la inductancia del refuerzo. La inductancia del campo se reduce con menos torres y piezas de poste poco profundas. A pesar de estos cambios, cuando está impulsado por AC, el cambio es peor que cuando se alimenta a DC.
Por lo tanto, sus clasificaciones de potencia rara vez son superiores a 1 kW. No se eleva la velocidad de carga, pero generalmente no es lo suficientemente alta como para dañar el motor.
La mayoría de los motores universales están hechos para su uso a velocidades superiores a 3000 rpm. Esta es la velocidad máxima de un motor de inducción cuando se suministra desde una fuente de alimentación de 50 Hz. Debajo de esta velocidad, el motor de inducción generalmente se prefiere.
Muchos motores universales operan a velocidades de hasta 12,000 rpm y pueden alcanzar hasta 20,000 rpm. Debido a las altas velocidades de funcionamiento, el motor universal es mucho más pequeño que para una inducción o un motor CC de baja velocidad de una notación idéntica.
Debido a los cepillos y al interruptor, requiere un mantenimiento frecuente y tiene un tiempo de funcionamiento relativamente corto.
Hasta hace poco, el motor Universal era el motor más barato capaz de funcionar a alta velocidad y tener un peso y tamaño relativamente muy bajos.
Los tipos de corriente continua sin motor o un motor de inducción de una sola fase alimentado por un inversor de frecuencia variable pueden convertirse en su competidor en el futuro cercano.
Algunas aplicaciones de motor universal son ventiladores, ejercicios eléctricos, electrodomésticos, etc.
Motores amorosos permanentes:
En los motores de corriente continua del imán permanente, la emoción en el suelo se obtiene aumentando adecuadamente los imanes permanentes en el estator. Se utilizan los imanes de ferritas o tierras raras (samario de cobalto). Las ferritas se usan comúnmente debido al menor costo, pero la máquina se vuelve voluminosa debido a la menor restricción.
Las tierras raras debido a su alta restricción permiten una gran reducción en el peso y el tamaño, pero son muy caros. Los motores amorosos permanentes se utilizan principalmente en el rango de poderes fraccionarios, pero están disponibles hasta 5 kW.
El uso de imanes permanentes para la emoción elimina la pérdida de cobre en el campo y la necesidad de licitaciones en el campo. En comparación con los motores de las heridas en el campo, son más efectivos, confiables, robustos y compactos.
El flujo de campo permanece constante para todas las cargas que dan una característica de torque de velocidad más lineal. En un motor excitado por separado, la falla de los alimentos en el suelo puede conducir a un estado de escape. Esto no sucede en motores amorosos permanentes.
Como el flujo es constante en estos motores, la velocidad no se puede controlar por encima de la velocidad básica. Estos motores tienen aplicaciones en vehículos eléctricos como ciclomotores, carritos de levantamiento, sillas de ruedas, etc.
Servo Motors de DC:
No hay una línea de intercambio clara entre el servo y la lesión convencional en el campo y los motores de DC amorosos permanentes.
Los servomotores están destinados a usarse en la velocidad de circuito cerrado y los sistemas de control de posición, donde los requisitos de rendimiento son tales que no pueden obtenerse mediante un motor de corriente continua normal. Un tipo de motor CC normal está diseñado para obtener un buen rendimiento de carga completa con un costo mínimo.
No proporciona una buena respuesta dinámica y una aclaración permanente cuando se usa en un reproductor de bucle cerrado. El servomotor, por otro lado, está diseñado para lograr un buen rendimiento dinámico y precisión del régimen permanente.
Está diseñado para obtener el mismo rendimiento en ambas direcciones de rotación, una alta relación de par / inercia, baja fricción y un par sin ondulación suave. En un tipo de motor de corriente continua, la inercia del marco es proporcional a la longitud y el diámetro en el cuadrado.
En algunos servomotores, la inercia se reduce al reducir el diámetro y aumentar la longitud para la misma nota. En características de baja potencia, donde el control de corriente no se incorpora, la corriente durante la operación transitoria puede ser incluso más alta de diez veces la corriente nominal.
El interruptor está diseñado para obtener una conmutación sin chispa incluso en corrientes tan importantes, lo que no será posible en un motor de corriente común. Debido a estos requisitos exigentes, los servomotores son mucho más caros que los motores CC actuales.
Sus notas pueden ser unos pocos vatios (en servos de instrumentos) en Megha Watts (Rollers de acero). Los servomotores pequeños son generalmente de tipo imán permanente.
Engines de bobina en movimiento:
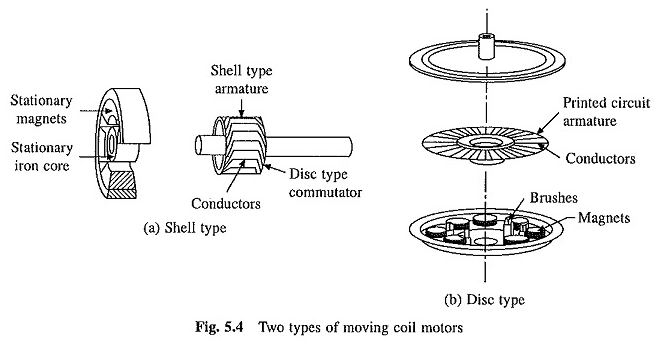
Algunas aplicaciones requieren una aceleración mucho mayor de lo que se puede hacer en un servomotor CC convencional. Los refuerzos de los motores actuales continuos de las bobinas móviles tienen construcciones especiales que permiten una reducción sustancial en la inercia de rosa e inductancia, lo que permite aceleraciones muy altas. Dos tipos de motores de bobina en movimiento son el tipo de carcasa y disco.
Tipo de carcasa:
Para maximizar la aceleración, el refuerzo de inercia debe minimizarse.
En un motor CC convencional, el refuerzo consiste en un devanado en las ranuras proporcionadas en un ciclador de material magnético, que se planea principalmente para dar una ruta de baja reticencia para el campo del estator y funciona con el devanado del refuerzo. Por lo tanto, el refuerzo tiene alta inercia.
En un motor de bobina móvil de tipo Shell (Fig. 5.4 (a)), el rotor consiste solo en un devanado de refuerzo. Por lo tanto, tiene una inercia muy baja. Una ruta de baja reticencia para el campo del estator es suministrada por un cilindro de material magnético estacionario.
El devanado de refuerzo consiste en conductores ensamblados para formar un cilindro de pared delgada. El interruptor puede tener construcción cilíndrica como en los motores CC convencionales o la construcción de tipos de disco.
Los motores pequeños (con diámetros alrededor de 1 cm), llamados micromotores, tienen un rodillo de refuerzo compuesto de cables simplemente barnizados dispuestos en forma cilíndrica y un interruptor de tipo de disco. Estos motores se usan ampliamente en cámaras, reproductores de cartas, sistemas de video, etc.
En motores más grandes, el refuerzo del refuerzo se realiza uniendo a los conductores usando resinas de polímero y fibra de vidrio para proporcionar una resistencia mecánica adecuada.
Tipo de disco o panqueques:
Los detalles de la construcción se ilustran en la Figura 5.4 (b). El refuerzo se realiza en forma de disco o panqueques, y los controladores de marco se parecen a los rayos en una rueda.
El rodillo de refuerzo se forma, ¿amortiguó los controladores de una lámina de cobre, solucionándolos y colocándolos en un disco ligero? Los segmentos del conductor se unen a un interruptor al centro del disco.
Tenga en cuenta que la dirección del flujo es axial y que la corriente de refuerzo es radial. Esto se opone a los motores de tipo Shell (o convencionales) donde la corriente es axial y el flujo es radial. El principio operativo es el mismo que el de un motor de corriente continua convencional.
Los motores de bobina móvil de disco son más robustos y están disponibles en tamaño hasta unos pocos kilovatios. Encuentran aplicaciones donde el espacio axial está en una bonificación como máquinas herramientas, discos, etc.
Los motores de bobina movidos se pueden suministrar con una gran cantidad de conductores (unos pocos cientos). Por lo tanto, la pareja permanece casi constante a medida que el rotor gira. Esto les permite producir una rotación muy fluida a baja velocidad.
La ausencia de hierro de refuerzo del motor tipo disco elimina las pérdidas de núcleo asociadas, lo que lo hace más efectivo que los motores CC convencionales. Como ya se indicó, la inercia baja e inductancia de baja refuerzo le da a los motores de la bobina en movimiento una excelente respuesta dinámica.
Motores de pareja:
Los motores CC diseñados para operar durante largos períodos en una condición en una parada o a baja velocidad se llaman motores de torque. Un tipo de motor CC normal está diseñado para optimizar el rendimiento a toda velocidad.
En pequeñas notas, la corriente bloqueada o de baja velocidad en los motores CC normales puede ser de 5 a 10 veces la corriente nominal. Si se permite que estos motores funcionen a baja velocidad (o se detengan), el devanado del marco se quemará sobrecalentando y el interruptor se dañará debido a una pesadez.
En caso de motores de par, debido al diseño especial, la corriente bloqueada y baja velocidad permanece por debajo de la apuesta segura. Algunos motores de par están diseñados para operar a baja velocidad por intermitente.
Las aplicaciones de los motores de par se pueden dividir en tres categorías:
- Donde el motor debe operar en el estado en un punto muerto. Aquí, el objetivo del motor es desarrollar un voltaje o presión requerida en un material, similar al resorte. Toolas de máquinas, el Splio es parte de esta categoría.
- En la segunda categoría, el motor de torque es necesario para moverse en solo unas pocas revoluciones o grados de revolución. La apertura de válvulas, interruptores y dispositivos de ajuste es algunos ejemplos.
- Esta categoría de aplicación implica un movimiento continuo del motor a baja velocidad, por ejemplo, el lector de bobinas.