CC Motor Drives sin escobas (Trapezoidal PMAC):
La sección transversal de un motor de CC con 2 2 polos con 2 polos está representada en la Figura 7.15. Tiene un rotor amoroso permanente con un arco de poste ancho. El estator tiene tres devanados de fase concentrados, que se mueven en 120 ° y cada devanado de fase se extiende más de 60 ° en cada lado.
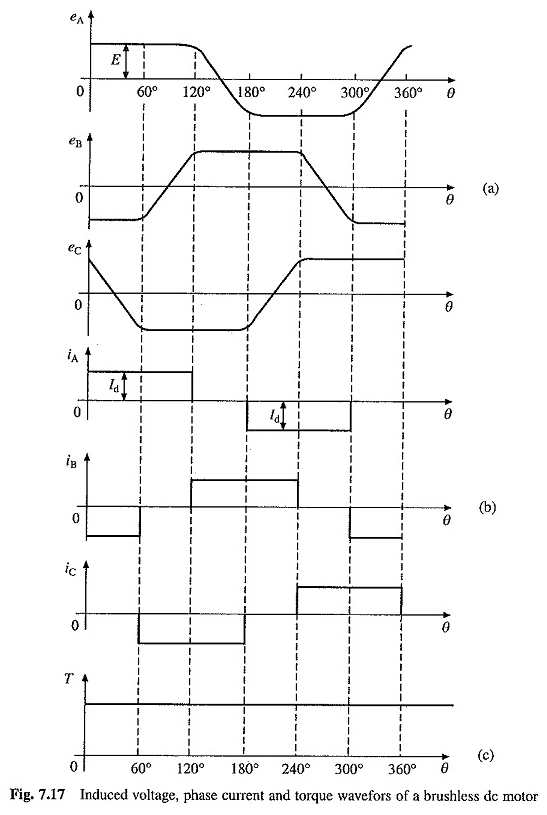
Las tensiones inducidas en tres fases se representan en la Figura 7.17 (a). La razón para obtener formas de onda trapezoidal ahora puede explicarse. Cuando gira en la dirección en el sentido antihorarus, hasta 120 ° de rotación de la posición ilustrada en la Fig.
7.15, todos los controladores superiores de la fase unirán el Polo Sur y todos los controladores inferiores de la fase para vincular el Polo Norte. En consecuencia, la tensión inducida en la fase A será la misma durante la rotación de 120 ° (Fig. 7.17 (a).

Más allá de 120 °, algunos conductores en el polo norte del enlace superior y otros en el Polo Sur. Lo mismo sucede con los controladores inferiores. En consecuencia, la tensión inducida en la fase tiene lineal lineal en la rotación de los siguientes 60 °. El resto de la forma de onda de la fase A y los wavelems de las fases B y C pueden explicarse de la misma manera.


Un motor PMAC trapezoidal alimentado en un inversor que funciona en modo autocontrolado se llama motor CC sin cepillos.

Motor DC sin escobas para aplicaciones de servo:
En la Figura 7.16 (a) se ilustra un motor de CC breve libre que usa un inversor de fuente de voltaje (VSI) y un motor PMAC trapezoidal.
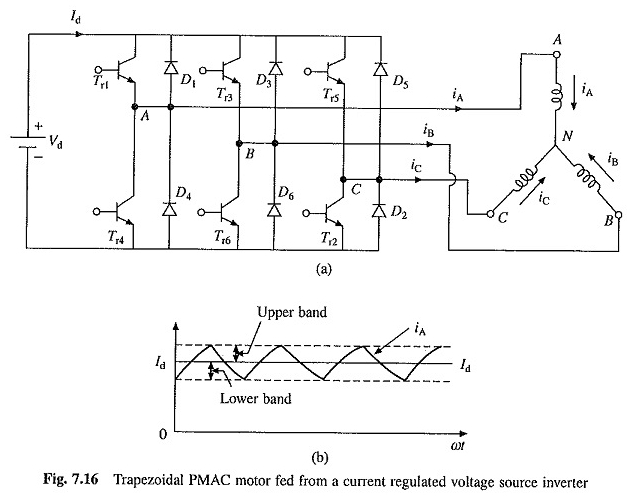
Los bobinados del estator están conectados a las estrellas. Tendrá sensores de posición del rotor, que no se ilustran en la figura. Las ondas de onda de voltaje de fase para un motor PMAC trapezoidal se representan en la Figura 7.17 (a). Que los devanados del estator se alimentan con impulsos de corriente representados en la Figura 7.17 (b).
Los impulsos de corriente son cada uno de 120 ° y se encuentran en la región donde el voltaje inducido es constante y máximo. Además, la polaridad de los pulsos de corriente es la misma que la de la tensión inducida. Dado que el flujo de brecha de aire es constante, el voltaje inducido es proporcional a la velocidad del rotor.
![]()
Durante cada intervalo de 60 ° en la Figura 7.17, la corriente entre una fase y sale de otra fase, por lo tanto, la fuente de alimentación al motor en cada uno de estos intervalos ![]()
Par desarrollado por el motor

La forma de onda de la pareja se da en la Figura 7.17 (c). Según la ecuación. (7.31) La pareja es proporcional a la identificación actual. Puede mostrar que una ID actual CC circula en el enlace CC. La operación de frenado regenerativo se obtiene revertiendo las corrientes de fase.
Esto también revertirá la ID de corriente de origen. Ahora la potencia va de la máquina al inversor y el inversor en la fuente de DC. Cuando la velocidad se invierte, la polaridad de las tensiones inducidas se invierte. Con la polaridad actual ilustrada en la Fig.
7.17, el lector ofrece una operación de frenado regenerativo y cuando se invierte la dirección actual, se obtiene la operación del automóvil. Las formas de onda de corriente que se muestran en la Figura 7.17 (b) se producen de la siguiente manera.
Durante el período 0∘ a 60∘, ia = id e ib = –id. La IA actual entre la fase A y la participación a través de la fase B. Cuando los transistores TR1 y TR6 son, los terminales A y B están relacionados con los terminales positivos y negativos de la fuente DC respectivamente.
Una corriente circulará a través de la ruta compuesta por VD, TR1, Fase A, Fase B y TR6 y la tasa de cambio de corriente IA será positiva. Cuando TR1 y TR6 se desactivan, esta corriente circulará a través de una ruta compuesta de fase A, fase B, diodo D3, VD y diodo D4.
Dado que la corriente debe circular contra el voltaje VD, la tasa de variación de IA será negativa. Por lo tanto, al activar y extinguir la fase TR1 y TR6 alternativamente, la corriente A se puede hacer para seguir la ID de corriente de referencia en una banda de histéresis como se muestra en la Figura 7.16 (b). Al reducir la banda lo suficiente, se puede producir casi una corriente CC del valor deseado.
La operación para otros intervalos de 60 ° puede explicarse de la misma manera. Para colocar adecuadamente los pulsos de potencia en comparación con los voltajes inducidos o la identificación de estos sesenta intervalos, las señales se generan mediante sensores de posición del rotor.
En las seis posiciones angulares del rotor, deben detectarse por ciclo de la tensión inducida. Los sensores de efectos de la sala pueden detectar la magnitud y la dirección de un campo magnético. Por lo tanto, tres efectos de la habitación pueden detectar las seis posiciones del rotor.
Los sensores están montados en intervalo eléctrico de 60 ° y se alinean apropiadamente con el devanado del estator. Los sensores ópticos también están disponibles. Los sensores utilizados con el motor PMAC trapezoidal son más baratos en comparación con los requeridos con el motor PMAC sinusoide.
Dado que el motor trapezoidal también es más barato, el lector tiene un costo mucho menor. Aunque la respuesta dinámica es comparable, las ondas de torque son considerablemente más altas en este lector.
La ondulación del par se debe a la tensión inducida de que la tensión no es exactamente trapezoidal y la incapacidad de los inversores para producir ondas de onda de corriente rectangular.
El jugador de PMAC trapezoidal se usa ampliamente en el entrenamiento de servo, excepto en discos de alto rendimiento donde se prefiere el jugador de motor sinusoidal PMAC.
Hay una gran cantidad de similitudes entre el motor PMAC trapezoidal alimentado con el inversor y un motor de CC. Como motor de corriente continua, el voltaje inducido es proporcional a la velocidad [Eq. (7.30)], el par es proporcional a la corriente de refuerzo [Eq.
(7.31)], y los campos de estator y rotor permanecen estacionarios en comparación entre sí. Sin embargo, no tiene cepillos y inconvenientes asociados, por lo que el motor PMAC trapezoidal alimentado con el inversor se conoce comúnmente como motor CC Broom.
Este motor también está diseñado como un motor DC conmutado electrónicamente, porque el inversor cumple la misma función aquí que los cepillos y el interruptor en un motor de CC, es decir.
Para mover las corrientes entre los controladores del marco para mantener el estator y los campos del rotor estacionario (y en cuadratura) en comparación entre sí.
Unidades de motor CC sin escobas de bajo costo:
Uno de los puntos importantes sobre los lectores de motores CC sin CC es solo mediante la integración del convertidor / inversor con el motor, el lector se simplifica considerablemente, lo que resulta en un control más simple y una reducción sustancial en el costo.
Mientras que las máquinas de tres fases se utilizan en aplicaciones mayoritarias, también se utilizan máquinas monofásicas y cuatro fases. Del mismo modo, se utilizan una amplia variedad de convertidores / inversores.
Los motores funcionan con pulsos de corriente y también por pulsos de voltaje con un límite de corriente solo para garantizar que la corriente no exceda las dimensiones del convertidor y el motor. Dos de estos lectores se describen a continuación.

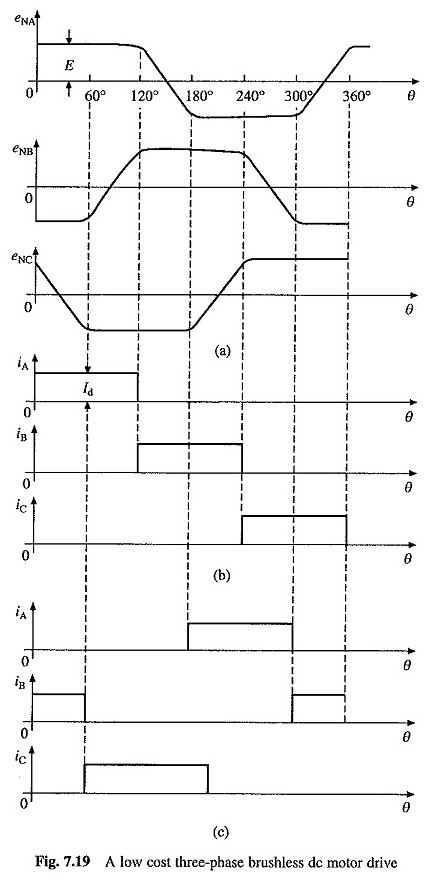
En la Figura 7.18 se ilustra una unidad de bajo costo con un motor PMAC trapezoidal de tres fases. Solo usa tres transistores y tres convertidores de diodos, que solo pueden proporcionar corrientes o tensiones positivas con tres fases motoras.
Los voltajes inducidos y la corriente proporcionados para las operaciones de automobilización y frenado están representados en la Figura 7.19. Cuando se proporcionan pulsos de potencia positivos a 120 ° como se indica en la Figura 7.19 (b) al motor, la operación de la conducción se obtiene en la dirección antihorlarus.
Cuando estos impulsos se compensan en 180 °, como se muestra en la Figura 7.19 (c), se obtiene la operación de frenado. Las operaciones de automobilización y frenado para la rotación en la dirección de tiempo se obtienen sincronizando los impulsos como se indica en la Figura 7.19 (c) y (b), respectivamente. Cada fase es suministrada principalmente por un helicóptero.
La corriente de la fase NA está controlada por TR1 y D1. Cuando TR1 está en la fuente, el VD está conectado a través del devanado de NA y la tasa de variación de IA es positiva. Cuando TR1 se desactiva, las ruedas IA actuales a través del diodo D1 y la tasa de variación de AI son negativas.
Por lo tanto, durante el período de 0 ° a 120 °, TR1 se puede activar y desactivar alternativamente para que la corriente IA siga una corriente de referencia rectangular I * A en una tira de histéresis.
En comparación con el lector en la Figura 7.16, el par producido por este lector para un valor dado de ID será la mitad, dando una respuesta dinámica más lenta. El lector también tiene una ondulación de torque más alta.
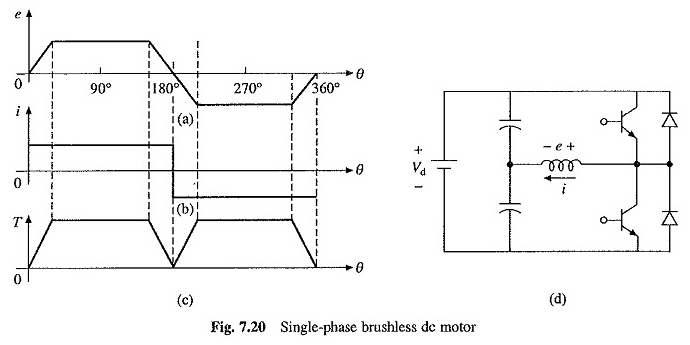
Examinemos también el entrenamiento motor de corriente continua de una sola fase. Dejar el motor tiene un polo ancho se indica en la Figura 7.15 y un solo devanado de fase concentrada con una propagación de 60 ° en cada lado.
Deje que θ se mida desde el momento en que el eje de la fase coincide con el eje del poste del rotor, entonces la tensión inducida en el devanado de fase tendrá la forma de la onda como se muestra en la Figura 7.20. O el motor que se proporcionará desde un convertidor monofásico de medio intento ilustrado en la Fig.
7.20 (d) con una forma de onda de corriente rectangular que se muestra en la Figura 7.20 (6). Luego, el par producido por el motor tendrá una forma de onda ilustrada en la Figura 7.20 (c).
Aunque el par tiene una gran ondulación, cuando funciona a alta velocidad, las ondas de par serán filtradas por la inercia del sistema de carga del motor, dando una velocidad uniforme.
Características y aplicaciones importantes:
Debido a la ausencia de cepillos e interruptores, el entrenamiento del motor libre de alimentación sin motor tiene una serie de ventajas en comparación con los motores CC convencionales.
No requieren prácticamente mantenimiento, tienen una larga vida útil, alta confiabilidad, baja inercia y fricción y baja interferencia y ruido de radiofrecuencia.
Debido a la baja inercia y la fricción, tienen una aceleración más rápida y pueden ejecutarse a velocidades mucho más altas, hasta 100,000 rpm y son más comunes. Debido a que los devanados de refuerzo están en el estator, el enfriamiento es mucho mejor, es decir que se pueden obtener salidas más altas específicas.
Estos motores tienen una alta eficiencia, superando el 75%, mientras que los motores de campo de bajas calificaciones de energía tienen una eficiencia mucho menor. Los inconvenientes en comparación con los motores CC convencionales son un alto costo y un par de arranque bajo. El tamaño de un motor Balais CC es casi el mismo que el motor CC convencional.
Los lectores de motores CC CC -CC encuentran aplicaciones en los lectores de la tabla de turnos en los lectores de grabación, el lector de la banda para grabadoras de video, chupas en discos duros para computadoras y discos de bajo costo y baja potencia en periféricos de computadora, instrumentos y sistemas de control.
También tienen aplicaciones en los campos de los aeroespaciales, por ejemplo, motores de giroscopio y enfriadores criogénicos biomédicos y bombas cardíacas artificiales. También se utilizan para conducir ventiladores de enfriamiento para circuitos electrónicos y disipadores de calor.