Drive del motore CC senza scope (PMAC trapezoidale):
La sezione trasversale di un motore a CC con 2 2 poli con 2 poli è rappresentata nella Figura 7.15. Ha un rotore amorevole permanente con un ampio arco di palo. Lo statore ha tre avvolgimenti di fase concentrati, che vengono spostati di 120 ° e ogni avvolgimento di fase si estende su 60 ° su ciascun lato.
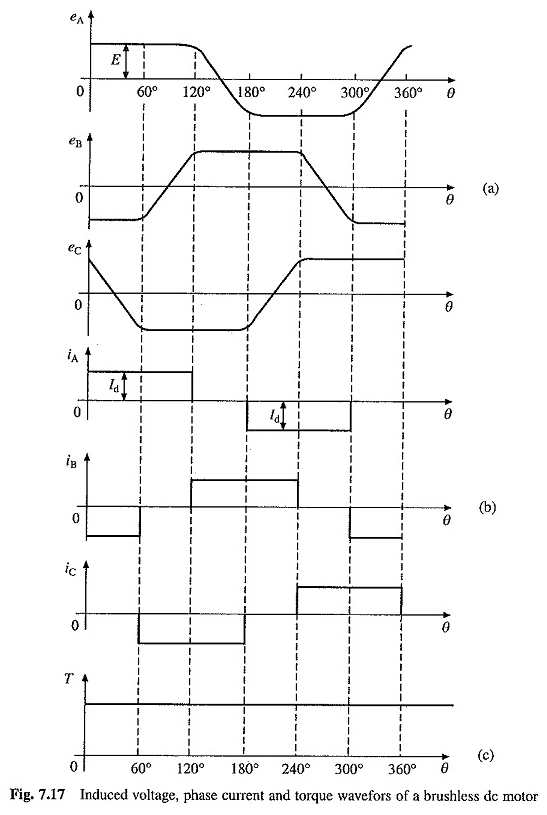
Le tensioni indotte in tre fasi sono rappresentate nella Figura 7.17 (a). Il motivo per ottenere forme d’onda trapezoidali può ora essere spiegata. Quando si gira la direzione in senso antitoraro, fino a 120 ° rotazione della posizione illustrata in Fig.
7.15, tutti i driver superiori della fase collegheranno il polo sud e tutti i driver inferiori della fase per collegare il polo nord. Di conseguenza, la tensione indotta nella fase A sarà la stessa durante la rotazione di 120 ° (Fig. 7.17 (A).

Oltre 120 °, alcuni conducenti nel polo settentrionale del collegamento superiore e altri del Polo Sud. La stessa cosa accade con i driver inferiori. Di conseguenza, la tensione indotta nella fase ha linearmente lineari nella rotazione dei seguenti 60 °. Il resto della forma d’onda della fase A e delle wavelem delle fasi B e C può essere spiegato allo stesso modo.


Un motore PMAC trapezoidale nutrito in un inverter che opera in modalità autocontrollata è chiamato motore CC senza spazzole.

Motore DC senza scope per le applicazioni di servo:
Un breve motore a CC gratuito che utilizza un inverter di sorgente di tensione (VSI) e un motore PMAC trapezoidale è illustrato nella Figura 7.16 (a).
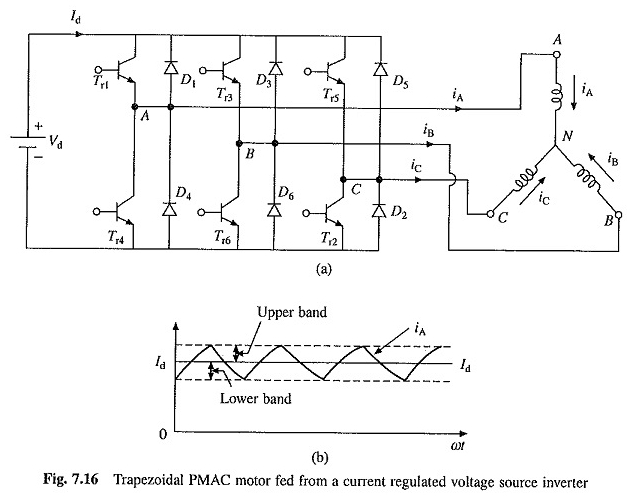
Gli avvolgimenti dello statore sono collegati alle stelle. Avrà sensori di posizione del rotore, che non sono illustrati nella figura. Le onde d’onda di tensione di fase per un motore PMAC trapezoidale sono rappresentate nella Figura 7.17 (a). Che gli avvolgimenti dello statore siano alimentati con impulsi attuali rappresentati nella Figura 7.17 (b).
Gli impulsi di corrente sono ciascuno di 120 ° e si trovano nella regione in cui la tensione indotta è costante e massima. Inoltre, la polarità degli impulsi attuali è uguale a quella della tensione indotta. Poiché il flusso di gap d’aria è costante, la tensione indotta è proporzionale alla velocità del rotore.
![]()
Durante ogni intervallo di 60 ° nella Figura 7.17, la corrente tra una fase e esce da un’altra fase, quindi l’alimentazione al motore in ciascuno di questi intervalli ![]()
Coppia sviluppata dal motore

La forma d’onda della coppia è riportata nella Figura 7.17 (c). Secondo l’Eq. (7.31) La coppia è proporzionale all’ID corrente. È possibile visualizzare che un ID corrente CC circola nel collegamento CC. L’operazione di frenatura rigenerativa è ottenuta invertendo le correnti di fase.
Ciò invertirà anche l’ID corrente di origine. Ora la potenza va dalla macchina all’inverter e all’inverter nella sorgente DC. Quando la velocità viene invertita, la polarità delle tensioni indotte viene invertita. Con la polarità attuale illustrata in FIG.
7.17, il lettore fornisce un’operazione di frenatura rigenerativa e quando viene invertita la direzione corrente, si ottiene il funzionamento dell’automobile. Le forme d’onda di corrente mostrate nella Figura 7.17 (b) sono prodotte come segue.
Durante il periodo da 0∘ a 60∘, ia = id e ib = –id. L’attuale AI tra la fase A e la condivisione attraverso la fase B. Quando sono i transistor TR1 e TR6, i terminali A e B sono correlati rispettivamente ai terminali positivi e negativi della DC della sorgente.
Una corrente circolerà attraverso il percorso composto da VD, TR1, Fase A, Fase B e TR6 e il tasso di variazione di corrente IA sarà positivo. Quando TR1 e TR6 sono disattivati, questa corrente circolerà attraverso un percorso composto da fase A, fase B, diodo D3, VD e diodo D4.
Poiché la corrente deve circolare rispetto alla tensione VD, la velocità di variazione IA sarà negativa. Pertanto, attivando e estinguendo alternativamente la fase TR1 e TR6, la corrente A può essere eseguita per seguire l’ID corrente di riferimento in una banda di isteresi, come mostrato nella Figura 7.16 (b). Riducendo abbastanza la banda, è possibile produrre quasi una corrente CC del valore desiderato.
L’operazione per altri intervalli di 60 ° può essere spiegata allo stesso modo. Per posizionare correttamente gli impulsi di potenza rispetto alle tensioni indotte o all’identificazione di questi sessanta intervalli, i segnali sono generati dai sensori di posizione del rotore.
Nelle sei posizioni angolari del rotore, dovrebbero essere rilevate dal ciclo della tensione indotta. I sensori dell’effetto Hall possono rilevare l’entità e la direzione di un campo magnetico. Pertanto, tre effetti della stanza possono rilevare le sei posizioni del rotore.
I sensori sono montati a 60 ° intervalli elettrici e allineati in modo appropriato con l’avvolgimento dello statore. Sono inoltre disponibili sensori ottici. I sensori utilizzati con il motore PMAC trapezoidale sono più economici rispetto a quelli richiesti con il motore PMAC sinusoide.
Poiché anche il motore trapezoidale è più economico, il lettore ha un costo molto più basso. Sebbene la risposta dinamica sia comparabile, le increspature di coppia siano notevolmente più elevate in questo lettore.
L’ondata di coppia è causata dalla tensione indotta secondo cui la tensione non è esattamente trapezoidale e l’incapacità degli inverter di produrre onde d’onda di corrente rettangolare.
Il giocatore PMAC trapezoidale è ampiamente utilizzato nell’allenamento dei servi, tranne nei dischi ad alte prestazioni in cui è preferito il giocatore del motore sinusoidale PMAC.
Ci sono un gran numero di somiglianze tra il motore PMAC trapezoidale alimentato con l’inverter e un motore a CC. Come motore a corrente continua, la tensione indotta è proporzionale alla velocità [Eq. (7.30)], la coppia è proporzionale alla corrente di rinforzo [Eq.
(7.31)] e i campi dello statore e del rotore rimangono fermi rispetto all’altro. Tuttavia, non ha pennelli e svantaggi associati, quindi il motore PMAC trapezoidale alimentato con l’inverter è comunemente noto come motore CC di scopa.
Questo motore è anche progettato come un motore CC a commutazione elettronicamente, perché l’inverter svolge la stessa funzione qui delle spazzole e dell’interruttore in un motore a CC, vale a dire
Per spostare le correnti tra i conducenti del framework per mantenere lo statore e i campi del rotore stazionario (e in quadratura) rispetto all’altro.
Azionamenti del motore CC senza scope a basso contenuto di gradi:
Uno dei punti importanti relativi ai lettori di motori CC senza CC è solo per integrazione del convertitore / inverter con motore, il lettore è considerevolmente semplificato, con conseguente controllo più semplice e una sostanziale riduzione del costo.
Mentre le macchine a tre fasi vengono utilizzate nelle applicazioni di maggioranza, vengono utilizzate anche macchine monofase e quattro fasi. Allo stesso modo, viene utilizzata un’ampia varietà di convertitori / inverter.
I motori sono alimentati dagli impulsi di corrente e anche da impulsi di tensione con un limite di corrente solo per garantire che la corrente non superi le dimensioni del convertitore e del motore. Due di questi lettori sono descritti di seguito.

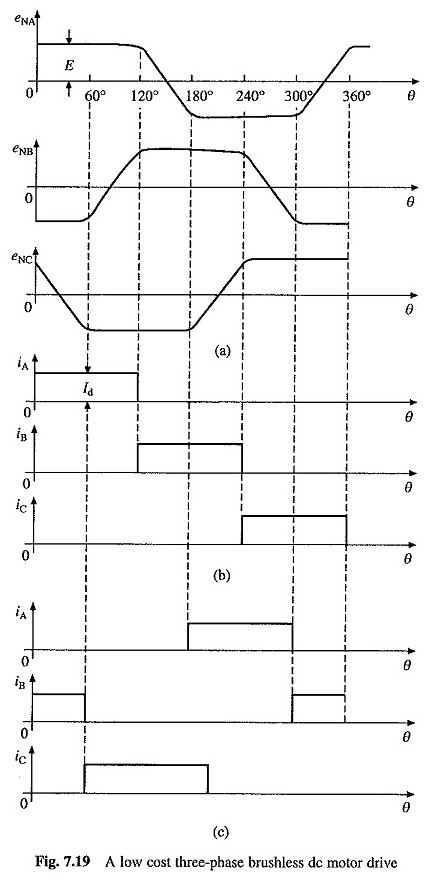
Un’azionamento a basso costo che utilizza un motore PMAC trapezoidale a tre fasi è illustrata nella Figura 7.18. Utilizza solo tre transistor e tre convertitori di diodi, che possono fornire solo correnti o tensioni positive con tre fasi motorie.
Le tensioni indotte e la corrente fornita per le operazioni di automobilizzazione e frenata sono rappresentate nella Figura 7.19. Quando gli impulsi di potenza positivi a 120 °, come indicato nella Figura 7.19 (b), vengono forniti al motore, il funzionamento della guida si ottiene nella direzione antitorarista.
Quando questi impulsi sono offset di 180 °, come mostrato nella Figura 7.19 (c), si ottiene l’operazione di frenatura. Le operazioni di automobilizzazione e frenata per la rotazione nella direzione del tempo sono ottenute sincronizzando gli impulsi come indicato nella Figura 7.19 (c) e (b), rispettivamente. Ogni fase è fornita principalmente da un elicottero.
La corrente di fase NA è controllata da TR1 e D1. Quando TR1 è sulla fonte, il VD è collegato attraverso l’avvolgimento NA e la velocità di variazione dell’IA è positiva. Quando TR1 viene disattivato, l’attuale IA ruota attraverso il diodo D1 e il tasso di variazione dell’IA sono negativi.
Pertanto, durante il periodo da 0 ° a 120 °, TR1 può essere alternativamente attivato e disattivato in modo che la corrente IA venga fatta seguire una corrente di riferimento rettangolare I * A in una striscia di isteresi.
Rispetto al lettore nella Figura 7.16, la coppia prodotta da questo lettore per un determinato valore di ID sarà la metà, dando una risposta dinamica più lenta. Il lettore ha anche un’ondulazione di coppia più alta.
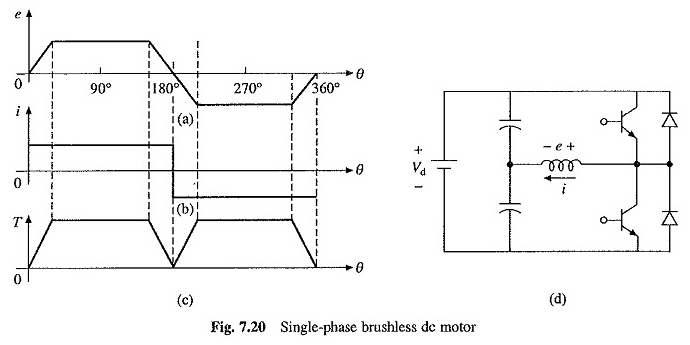
Esaminiamo anche l’allenamento motorio a corrente continua a fase monofase. Lasciare il motore ha un palo largo nella Figura 7.15 e un singolo avvolgimento di fase concentrato con una diffusione di 60 ° su ciascun lato.
Sia θ misurato dal momento in cui l’asse della fase coincide con l’asse del rotore, quindi la tensione indotta nell’avvolgimento della fase avrà la forma dell’onda come mostrato nella Figura 7.20. O il motore da fornire da un convertitore monofase di mezzo pont illustrato in FIG.
7.20 (d) con una forma di onda di corrente rettangolare mostrata nella Figura 7.20 (6). Quindi, la coppia prodotta dal motore avrà una forma d’onda illustrata nella Figura 7.20 (c).
Sebbene la coppia abbia una grande ondulazione, quando funziona ad alta velocità, le increspature della coppia saranno filtrate dall’inerzia del sistema di carico del motore, dando una velocità uniforme.
Caratteristiche e applicazioni importanti:
A causa dell’assenza di spazzole e interruttori, la formazione del motore senza potenza senza motore ha una serie di vantaggi rispetto ai motori CC convenzionali.
Non richiedono praticamente alcuna manutenzione, hanno una lunga durata, alta affidabilità, bassa inerzia e attrito e bassa interferenza e rumore della radiofrequenza.
A causa della bassa inerzia e dell’attrito, hanno un’accelerazione più rapida e possono essere eseguiti a velocità molto più elevate – fino a 100.000 giri / min e sono più comuni. Poiché gli avvolgimenti di rinforzo sono sullo statore, il raffreddamento è molto meglio, vale a dire che si possono ottenere uscite più elevate specifiche.
Questi motori hanno un’alta efficienza, superando il 75% mentre i motori di campo di basse valutazioni di potenza hanno un’efficienza molto più bassa. Gli svantaggi rispetto ai motori CC convenzionali sono un costo elevato e una coppia di partenza bassa. La dimensione di un motore CC Balais è quasi la stessa del motore CC convenzionale.
I lettori di motori CC senza CC trovano applicazioni a turno i lettori di registratori di registrazione, il lettore di band per registratori video, sputori in dischi rigidi per computer e dischi a basso contenuto di potenza e a bassa potenza in periferiche del computer, strumenti e sistemi di controllo.
Hanno anche applicazioni nei campi di aerospaziale, ad esempio motori di giroscopio e refrigeratori criogenici biomedici e pompe cardiache artificiali. Sono anche utilizzati per guidare ventole di raffreddamento per circuiti elettronici e dissipatori di calore.