Controllo della velocità nel ciclo del motore CC chiuso:
Il controllo del ciclo chiuso del motore CC – i convertitori (raddrizzatori ed elicotteri) sono costruiti utilizzando dispositivi a semiconduttore, che hanno una capacità termica molto bassa. Pertanto, le loro correnti transitorie e stabili sono uguali.
I motori CC possono trasportare la corrente nominale da 2 a 3,5 volte durante le operazioni di transizione a breve termine, come avvio, frenata e inversione. La corrente è alta, la coppia è alta e la risposta di transizione è più alta.
Pertanto, quando è richiesta una risposta rapida durante le operazioni di transizione, la corrente del motore può avere un valore massimo autorizzato. La valutazione del convertitore viene quindi scelta pari al valore massimo autorizzato della corrente del motore.
A causa della significativa notazione corrente, il costo del convertitore sarà ora più elevato. Quando non è richiesta la risposta di transizione rapida, viene scelta la nota corrente del convertitore per essere uguale alla costa corrente del motore al fine di mantenere il costo del convertitore basso.
I dischi ad anello aperto sono forniti con un controllo limite di corrente e al fine di proteggere il convertitore dai sovraccarichi di corrente.
Il controllo della velocità del circuito chiuso dei diagrammi del motore CC viene fornito con un ciclo di controllo della corrente interna al fine di limitare la corrente entro un limite di sicurezza e anche accelerare e rallentare il lettore nel massimo autorizzato e di coppia durante le operazioni di transizione.

Tuttavia, va notato che la decelerazione nella coppia corrente o massima sarà possibile quando il convertitore utilizzato ha anche la capacità operativa di frenatura.
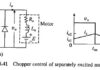
Si può anche notare che il raddrizzatore controllato verrà utilizzato quando l’alimentazione è AC e l’elicottero verrà utilizzato quando l’alimentazione è DC.
L’approccio di base al controllo della velocità chiusa sotto e sopra la velocità è spiegato dal lettore nella Figura 5.47. Il lettore utilizza il ciclo di controllo della corrente interna e il circuito di velocità esterno.
Tale lettore opererà a una corrente di campo costante e una tensione di interruzione variabile al di sotto della velocità di base e a una tensione di rinforzo costante e una corrente di campo variabile sopra la velocità di base. Il rinforzo e il campo sono quindi alimentati da rettificatori completamente controllati.
Poiché il rinforzo è alimentato da un raddrizzatore completamente controllato, la frenata anteriore non è possibile; Il lettore rallenterà solo a causa della coppia di ricarica. A causa del controllo della corrente interna con il limitatore di corrente, l’accelerazione avverrà informata e alla coppia massima autorizzata.
Nel convertitore a semiconduttore, Fed porta spesso al controller PI (proporzionale e integrale) perché filtra il rumore che può altrimenti diventare un problema. Il controller PI fornisce anche una buona precisione allo stato di equilibrio.

Esaminiamo prima l’operazione a velocità di base. Nel ciclo di controllo sul campo, l’emf E viene confrontato con una tensione di riferimento E * che viene scelta per essere compresa tra 0,85 e 0,95 della tensione di rinforzo nominale.
Il valore più alto viene utilizzato per motori a bassa resistenza al circuito di rinforzo. Per velocità al di sotto della velocità di base, il controller del campo di saturazione a causa di un grande valore di errore EF. L’angolo di premio del raddrizzatore del campo αF viene mantenuto a zero, applicando la tensione nominale sul terreno.
Ciò garantisce la corrente di campo nominale per il funzionamento del motore al di sotto della velocità di base (ωmb). Quando il riferimento di velocità viene aumentato da ω * m1 a ω * m2 (ω * m2 <ωm1) a causa di un errore di velocità ad alta velocità, il limitatore di corrente satura e definisce il riferimento corrente al valore massimo autorizzato.
Il lettore accelera la corrente e la coppia massima disponibile. Quando la velocità raggiunge vicino a ω * M2, il limitatore di corrente è dettagliato e la guida viene regolata alla velocità ωm2 e alla corrente che fornisce una coppia del motore pari alla coppia di carico.
Se il riferimento di velocità viene ridotto a ω * M1, il riferimento corrente viene definito a zero e il lettore viene ingannevole a causa della coppia di carico.
Quando ωm diventa leggermente inferiore a ω * m1, la corrente del motore scorre di nuovo e infine porta a regole alla velocità ωm1 e alla corrente per la quale la coppia del motore bilancia la coppia di carico. Per un errore di velocità negativa, i * a è definito a zero perché l’i * a negativo è senza utilizzo.
Tuttavia, addebiterà il controller PI. Quando la velocità di riferimento aumenta di nuovo, il che rende la velocità all’errore positivo, il controller PI caricato impiega più tempo per rispondere, il che rende la risposta del transitorio più lento.
Ora consentire l’operazione di essere esaminata al di sopra della velocità di base. Vicino alla velocità di base, il controller di campo è saturo. Ora, se la velocità di riferimento è definita per una velocità maggiore della velocità di base, il riferimento corrente è definito al valore massimo autorizzato.
L’angolo di tiro del raddrizzatore di rinforzo αA è inizialmente ridotto per aumentare. Il motore accelera, EF aumenta, diminuisce EF, riducendo la corrente di campo.
Pertanto, la velocità del motore continua ad aumentare e la corrente di campo continua a diminuire fino a quando la velocità del motore non diventa uguale alla velocità di riferimento. Poiché l’errore di velocità sarà ora piccolo, tornerà a un valore vicino al valore originale.
Pertanto, il controllo della velocità al di sopra della velocità di base è ottenuto dal controllo del campo con la tensione di rinforzo mantenuta vicino al valore nominale. Nella regione di controllo del campo (velocità di base sopra), il lettore reagisce molto lentamente a causa del grande valore della costante del tempo di campo.