Contattare il controllo del motore tramite convertitori:
Il controllo del motore CC è ottenuto comodamente ed efficiente dai convertitori in fase di controllo in cui la tensione di ingresso CA viene convertita in un’uscita CC controllata.
Il processo di commutazione, il trasferimento della corrente da un tiristore all’altro, in questi convertitori è una commutazione naturale o lineare economica. Come, viene attivato un tiristore in arrivo, rende il contrario del tiristore in uscita, estinguendolo.
Non è quindi necessario alcun circuito di commutazione aggiuntivo. L’efficienza di conversione della potenza in questi convertitori è maggiore del 95% a causa di perdite relativamente basse nei tiristori.
Questi convertitori sono utilizzati nel controllo della velocità dei motori CC Fractionary-KW e nei motori di grandi dimensioni utilizzati nei dischi inversi a velocità variabile per i rulli con dimensioni del motore tanto importanti come diversi MW.
In alcuni tipi di convertitori (semi-convertitori), un diodo noto come diodo della ruota libera è collegato sui terminali del motore per consentire la dissipazione dell’energia immagazzinata nell’induttanza del motore e per fornire una continuità del motore quando i tiristi sono bloccati. Offre inoltre protezione contro le sovratensioni di transizione.

Convertitore a mezza onda singola:
La Figura 11.14 mostra un convertitore a mezza onda in fase monofase per controllare un motore CC eccitato separatamente. Richiede un singolo tiristore e un diodo della ruota libera. In questo circuito, la corrente del motore è sempre discontinua, con conseguenti scarse prestazioni del motore.

Questo tipo di convertitore viene utilizzato solo per motori inferiori a 400 W. Non sarà descritto in dettaglio qui; Questi derivano facilmente dalla descrizione delle forme d’onda (tensione e corrente) per il semi-convertitore.

Semi-Converter che fornisce un motore CC eccitato separatamente:
È un convertitore di un quadrante (Fig. 11.15a) che fornisce una tensione e una corrente di polarità sui terminali CC. Pertanto, non prevede la frenata rigenerativa, vale a dire il flusso di potenza del controllo del motore CC alla potenza CA. Quando non è richiesta la rigenerazione, questo convertitore viene utilizzato per motivi dell’economia.

La Figura 11.15 (b) fornisce i circuiti di un semi-convertitore che fornisce un controllo del motore CC eccitato separatamente. La resistenza al rinforzo RA e l’induttanza sono rappresentate in serie con un EMF EMF induce dal telaio mentre la tensione terminale di Inhessy è.
Ha due tiristori, due diodi e un diodo a ruote libero (collegato attraverso i terminali del motore). Si presume che nel funzionamento permanente, la corrente di rinforzo sia continua sull’intero intervallo operativo.
Le tipiche onde per onde di potenza permanenti sono rappresentate nella Figura 11.16. Il tiristore Th1 è disegnato nell’angolo α e Th2 all’angolo π + α rispetto alla tensione di alimentazione ν e il processo viene ripetuto continuamente.

In condizioni regolari, quando viene disegnato Th1 (ωt = α), il tubo Th1 e D2 e il motore sono collegati all’alimentazione, vale a dire νa = ν. A ωt = π, νa tende a diventare negativo man mano che la polarità della tensione di ingresso cambia.
Ciò significa che DFW, il diodo a ruota libera, diventa distorto in avanti e il flusso di rinforzo che scorre attraverso TH1D2 viene trasferito a DFW, il che significa che l’interruttore Th1 (naturalmente).
I terminali del motore sono cortocircuiti tramite DFW per il periodo della ruota libera π <ωt <π + α che fornisce continuità della corrente di rinforzo durante questo periodo in cui il motore rimane scollegato dall'alimentazione.
A ωt = π + α, th2 viene disegnato e la guida Th2d1, il che significa che DFW diventa invertito e quindi in circuito aperto. Il motore è nuovamente collegato alla fornitura del seguente periodo di π + α <ωt <2π. Questo processo si ripete continuamente.
Varie forme di tensione e onda d’onda di corrente di un controllo del motore CC eccitato nutrito separatamente da un semi-convertitore sono rappresentate nella Figura 11.16. Sebbene la tensione tra i terminali del motore (Fig.
11.16 (c)) contiene armoniche oltre un valore CC stabile, si suppone giustamente qui che il motore non risponde a queste armoniche e quindi funziona a velocità costante (N) e una FEM indotta costante (EA). Mentre Th1 disegna ωt = α, la corrente del motore è data da

Fino al punto P illustrato nella Figura 11.16 (a); ν> ea in modo che la corrente del motore aumenti. Lo stesso vale per il motore EMF EA. Durante questo periodo, a parte l’energia erogata al carico, l’energia viene anche immagazzinata nell’induttanza del motore (il).
Oltre il punto p, ν
Durante il periodo della ruota libera (π <ωt <π + α), il diodo continua ad essere distorto dall'inversione della tensione induttiva. Durante questo periodo, parte dell'energia immagazzinata nell'induttanza del motore viene consumata per alimentare il carico meccanico.
La corrente del motore, la velocità e la fem si riducono pertanto. Questo processo viene quindi ripetuto durante il periodo seguente (π + α <ωt <2π + α) tramite Th2d1 e successivamente tramite DFW. La corrente disegnata dalla potenza illustrata in Fig.
11.16 (d) è questa parte della corrente di rinforzo che circola nel corso dei periodi (α, π), (π + α, 2π), … quando il motore è collegato all’alimentazione. Non è necessario utilizzare il diodo in una ruota libera.
In sua assenza a ωt = π, D1 diventa distorto in un certo senso prima che la ruota libera avvenga attraverso Th1d1 fino a quando il th2 non viene disegnato. A ωt = 2π ruota libera avviene attraverso Th2d2 e così via.
È necessario osservare dalla Figura 11.16 (d) che il fondamentale dell’attuale tratto dal settore è in ritardo sulla tensione di un angolo φ1 (<α).
Corrente di rinforzo interrotta:
La corrente di rinforzo diventa discontinua per i grandi valori dell’angolo di ripresa, i valori di coppia elevata e bassa. Le prestazioni del motore si deteriorano con una corrente di rinforzo discontinua. Il rapporto di picco rispetto alla media e l’RMS ad una corrente di rinforzo media aumenta.
È quindi desiderabile utilizzare il motore in modalità corrente continua. Per raggiungere questo obiettivo, è possibile utilizzare uno strangolamento del circuito di rinforzo esterno, che diminuisce la velocità di diminuzione della corrente durante il funzionamento della ruota libera.
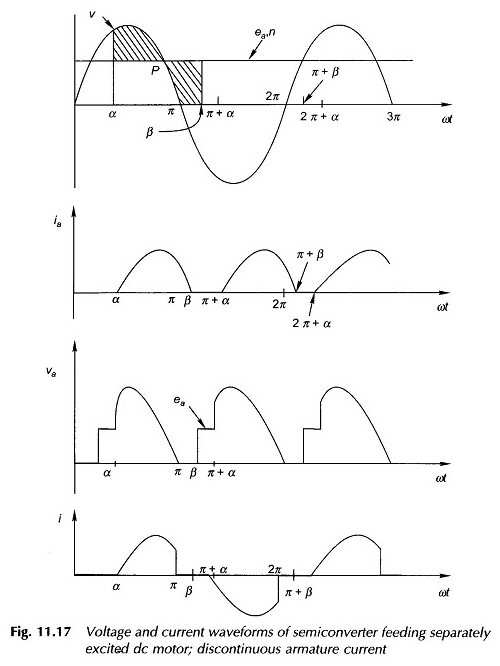
La tensione e le onde d’onda di alimentazione per semi-converter con corrente discontinua sono rappresentati nella Figura 11.17. Il motore è collegato all’alimentazione tramite Th1d2 per il periodo α <ωt <π. Oltre π, il motore viene corto attraverso il diodo del diodo in una ruota libera.
La corrente di rinforzo si disintegra a zero nell’angolo β (angolo di estinzione) π + α, vale a dire prima che venga disegnato il tiristore Th2, rendendo così la corrente di rinforzo discontinuo. Durante α a π, il periodo di conduzione tramite Th1D2, la tensione del terminale del motore è uguale alla tensione di ingresso.
Durante π a β, la tensione del terminale del motore è zero perché i terminali del motore sono cortocircuiti dal diodo della ruota libera. Da β a π + α, il motore costa e quindi la sua tensione terminale è la stessa della sua EMF induce.
Convertitore completo che fornisce un motore CC eccitato separatamente:

Un convertitore completo è un convertitore a due quadranti (vedi Fig. 11.18 (a)) in cui la polarità di tensione dell’uscita può essere invertita, ma la corrente rimane unidirezionale a causa dei tiristanti unidirezionali.
Un convertitore completo impiega quattro tiristori, ma non è richiesto alcun diodo per ruote libero. Un convertitore completo che fornisce un controllo del motore CC eccitato è illustrato separatamente nella Figura 11.18. La tensione e le onde d’onda di corrente sono rappresentate in FIG.
11.19 con l’ipotesi che la corrente di rinforzo IA sia quasi costante. I tiristati Th1 th3 conducono per l’intervallo α <ωt <π + α e collegano il motore all'alimentazione. A π + α, vengono attivati i tiristori Th2th4.
Immediatamente, la tensione di alimentazione appare sul pregiudizio opposto attraverso Th1 Th3 e li estingue. È una commutazione naturale o online. La corrente del motore viene trasferita da Th1 Th3 a Th2th4.
Poiché non c’è periodo in cui il motore è scollegato dall’alimentazione, non è necessaria alcuna ruota libera. Durante α a π, l’energia scorre dall’alimentazione al motore (ν e io siamo positivi, proprio come andare e IA).
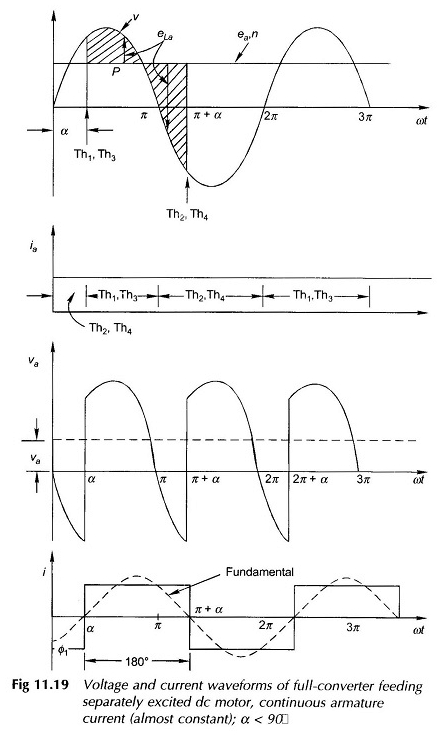
Tuttavia, durante π a π + α, parte del motore del motore viene restituita all’alimentazione (V e io abbiamo una polarità opposta, proprio come Va et ia, che significa l’inversione del flusso di potenza). Osservare che la fondamentale della corrente presa dal settore è in ritardo rispetto alla tensione per angolo φ1 = α.
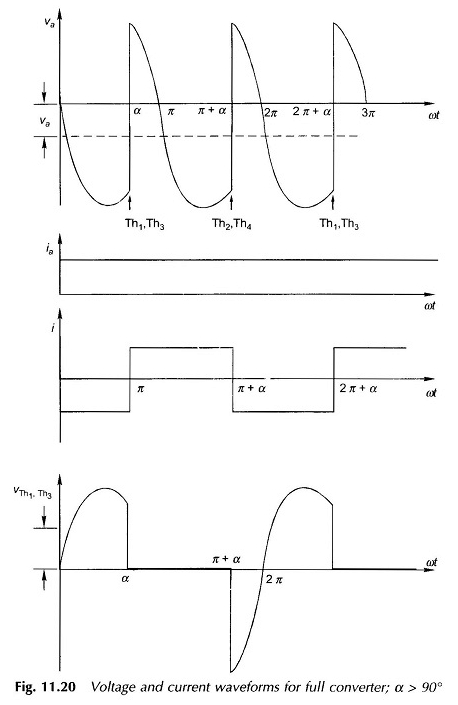
La tensione e le onde d’onda di corrente per α> 90 ° sono rappresentate nella Figura 11.20. La tensione media del terminale del motore è ora negativa. Se i terminali del motore sono invertiti, fungerà da alimentatore del generatore in potenza CA.
Questo è il funzionamento di inversione del convertitore e viene utilizzato nella frenata rigenerativa del motore. Un punto deve essere notato qui.
Durante il periodo di conduzione Th1th3 o Th2th4 Man mano che la tensione di alimentazione diventa negativa, la corrente di rinforzo inizia a ridurre, causando l’opposto della polarità dell’induttanza in modo che i tiristori conduttivi continuino ad essere distorti in avanti.
La tensione e l’onda di corrente Wavelems per il caso della corrente di rinforzo discontinua sono disponibili come nel caso del semi-convertitore. (Vedi Fig. 11.20).
Caratteristiche della velocità di coppia:
Supponiamo qui che la corrente di rinforzo sia continua. Per un semi-convertitore con un’azione a diodo a ruota libera, le insolite equazioni del circuito sono
Per un convertitore separato

Sia ν = √2 V sin ωt. Le tensioni medi del terminale del motore sono: con un semi-convertitore,

Con un convertitore completo,

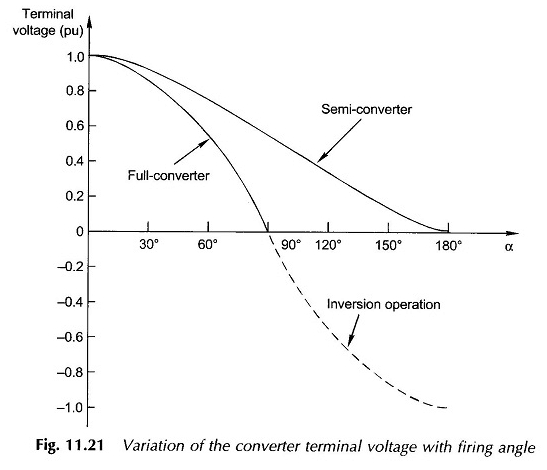
La Figura 11.21 fornisce la variazione della tensione del terminale del motore in funzione dell’angolo di tiro per il semi-convertitore e il convertitore completo. Nel caso della completa operazione di inversione del convertitore si verifica per 90 ° <α <180 °.
Le equazioni motorie per i valori medi sono

E

Sostituzione dell’equazione. (11.8) e VA di equazioni (11.5) o (11.6) nell’equazione. (11.9), i cambi di marcia sono dati come segue:
Con un semi-convertitore,

Con un convertitore completo

Il primo termine di equazioni. (11.10) e (11.11) rappresentano la velocità teorica di non carico mentre il secondo termine rappresenta la caduta di velocità causata dalla resistenza del rinforzo. La velocità teorica senza carico può essere variata dall’angolo di scatto α.
Nel caso di una corrente discontinua, la tensione media ai terminali del motore dipende dall’angolo β (angolo di estinzione) che a sua volta dipende dalla velocità del motore medio N, dalla corrente del motore media IA e dall’angolo di scatto α. Il trattamento analitico di questo caso va oltre la struttura di questo libro.
Doppio convertitore:
Il doppio convertitore può funzionare nei quattro quadranti, come mostrato nella Figura 11.22 (a). Il suo circuito è rappresentato nella Figura 11.22 (b). Questi sono due convertitori a piena figura che si convertono in DC in entrambe le direzioni. Il doppio convertitore fornisce un’inversione praticamente istantanea della tensione sui terminali DC.

Controllo del motore della serie DC:
Semi-convertitori e convertitori completi sono anche utilizzati per il controllo di un motore della serie DC. L’induttanza totale del circuito è elevata a causa del campo della serie, di conseguenza la cui corrente di rinforzo è principalmente continua.
Le equazioni motorie di governo differiscono perché il flusso / polo è ora proporzionale alla corrente di rinforzo. Il trattamento è altrimenti simile a quello di un controllo del motore con eccitazione corrente continua e non sarà continuato qui per mancanza di spazio.