Controllo del raddrizzatore del motore nella serie DC:
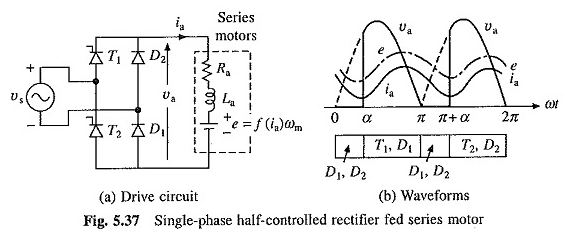
Il controllo del raddrizzatore di controllo monofase del motore della serie CC viene utilizzato in trazione. Un controllo raddrizzatore monofase controllato a metà del motore della serie DC è illustrato nella Figura 5.37 (a). È anche indicato il circuito del motore equivalente.
Poiché l’EMF posteriore diminuisce con la corrente di rinforzo, la conduzione discontinua si verifica solo in un intervallo operativo ristretto. Pertanto, verrà trascurato qui. I VA, gli Wavelem AI e la parte posteriore istantanea della parte posteriore per la conduzione continua sono rappresentati nella Figura 5.37 (b).
Sebbene, nello stato di equilibrio, le fluttuazioni della velocità siano trascurabili, e non è costante ma fluttua con l’IA. Per una determinata velocità, E è collegato all’IA dalla curva motorizzazione del motore, che non è lineare a causa della saturazione. COSÌ


Il funzionamento del motore è descritto dalle seguenti equazioni per il servizio e gli intervalli della ruota liberi, rispettivamente, rispettivamente,


A causa della presenza del termine f (ia), eq. (5.103) e (5.104) sono equazioni differenziali non lineari e possono essere risolti solo digitalmente. Un semplice metodo di analisi si ottiene quando E viene sostituito dal suo valore medio ea in modo che

O
Dal declino attraverso l’induttanza dovuta alla componente DC della corrente di rinforzo IA è zero

Per la conduzione continua, va per i regolatori a semi -controllati e completamente controllati è dato dalle equazioni. (5.93) e (5.83), rispettivamente.
La sequenza dei passaggi successivi viene utilizzata per calcolare la caratteristica della velocità del pulcino per un determinato α che prende il resoconto non lineare del circuito magnetico: viene scelto un valore per l’IA. Il valore corrispondente di KA è ottenuto dalla caratteristica motorizzazione del motore.
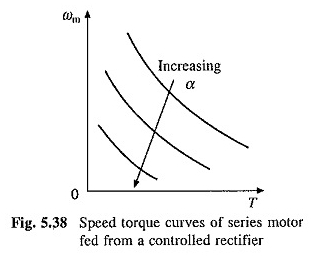
Per il valore noto di α, Calcola passa dall’equazione. (5.93) o (5.83), a seconda del circuito del raddrizzatore utilizzato. Ora, ωm e T sono ottenuti da Eq. (5.107) e (5.108), rispettivamente. La natura delle caratteristiche di velocità degli ingranaggi per il lettore nella Figura 5.37 (a) è rappresentata nella Figura 5.38.
Controllo del motore HP frazionario:

A causa del raddrizzatore a metà cost a metà cost a basso costo a basso costo rispetto alla Fig. 5.39 (a), l’uso di un singolo tiristore, viene comunemente usato per controllare i motori CC Frazionalità universali, DC e DC con magnete permanente. Questi dischi sono utilizzati negli strumenti manuali e piccoli dispositivi domestici.
La tensione del terminale del motore e della corrente di rinforzo Wavems Wavems è rappresentata nella Figura 5.39 (b). Il lettore opera è una conduzione discontinua con un grande intervallo di corrente zero e una significativa ondulazione.
Di conseguenza, l’efficacia è cattiva, la regolazione della velocità è significativa e la velocità può fluttuare attorno al suo valore medio quando l’inerzia è bassa. A volte viene aggiunto un diodo a ruota libera per ridurre la durata dell’intervallo di corrente zero.
I motori universali possono anche essere controllati da un controller di tensione di triace CA, come mostrato nella Figura 5.40 (a). Il triac è disegnato su α e (π + α). Ora, il rinforzo della macchina trasporta la corrente alternata (Fig. 5.40 (b)).
A causa della durata ridotta dell’intervallo di corrente zero, il lettore ha fluttuazioni di velocità trascurabili e una regolazione a velocità inferiore.