Controllo del raddrizzatore a fase monofase completamente controllato del motore CC:
Il controllo del raddrizzatore a fase monofase completamente controllato del motore CC è illustrato nella Figura 5.26 (a). Il motore è indicato dal suo circuito equivalente. Il cibo da campo non viene visualizzato. Quando è necessario il controllo del campo, il campo viene alimentato da un raddrizzatore controllato, se non da un raddrizzatore incontrollato. La tensione di ingresso è definita da

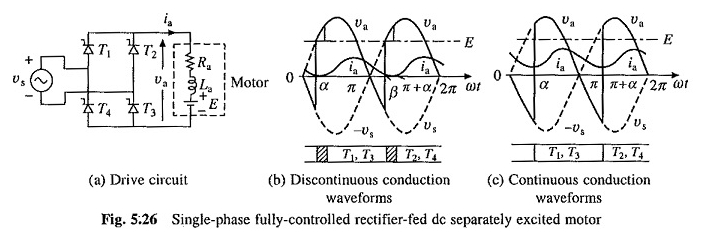

In un ciclo di tensione della sorgente, i tiristi T1 e T3 ricevono segnali della porta da α a π e i tiristori T2 e T4 ricevono i segnali della porta (π + α) a 2π. Quando la corrente di rinforzo non scorre continuamente, il motore funziona in una conduzione discontinua.
Quando la corrente circola continuamente, la conduzione sarebbe continua. Il lettore ha considerato, funziona principalmente in una conduzione discontinua. La conduzione discontinua ha diverse modalità operative.

Il metodo di analisi approssimativo, ma semplice, si ottiene quando viene presa in considerazione solo la modalità dominante di conduzione discontinua.

La tensione del terminale motore e delle onde d’onda di corrente per le modalità di conduzione discontinua e conduzione continua dominante sono rappresentate nelle Figg. 5.26 (b) e (c).
Nella modalità di conduzione discontinua del raddrizzatore controllato a forma di singola completa del motore CC, la corrente inizia a fluire con l’implementazione dei tiristori T1 e T3 a ωt = α. Il motore è collegato alla sorgente e la sua tensione del terminale è uguale a vs.
La corrente, che scorre contro i due, E e la tensione di origine dopo ωt = π, scende da zero a β. A causa dell’assenza di disattivazione dell’attuale T1 e T3. La tensione del terminale del motore è ora uguale alla sua tensione indotta E. Quando i tiristi T2 e T4 vengono tirati a (π + α), inizierà il seguente ciclo del terminale del motore.
Nella modalità di conduzione continua di controllo del raddrizzatore a fase singola completamente controllato del motore a corrente continua, una corrente positiva circola attraverso il motore e T2 e T4 sono in conduzione appena prima di α. L’applicazione degli impulsi della griglia è attivata su tiristi distorti davanti a T1 e T3 a α.
La conduzione dei pregiudizi inversi T1 e T3 T2 e T4 li disattiva. Un ciclo VA è finito quando T2 e T4 vengono attivati a (π + α) causando la disattivazione di T1 e T3.
Poiché la corrente di rinforzo non è perfetta DC, la coppia del motore fluttua. Poiché la coppia fluttua a una frequenza di 100 Hz, l’inerzia del motore è in grado di filtrare le fluttuazioni, il che dà una velocità quasi costante e un’ondulazione E.
Conduzione interrotta:
In un controllo raddrizzatore a fase monofase completamente controllato della tensione del terminale di controllo del motore VA, il lettore funziona a due intervalli (Fig. 5.26 (b)):
- Intervallo di servizio (α ≤ ωt ≤ β) quando il motore è collegato alla sorgente e va = vs.
- Intervallo di corrente zero (β ≤ ωt ≤ π + α) quando ia = 0 e va = E.
Il funzionamento del lettore è descritto dalle seguenti equazioni: 
Soluzione di equazione. (5.72) ha due componenti, uno a causa della sorgente Ca (VM / Z) sin (ωt – φ) e altri a causa dell’EMF ( – E / RA). Ognuno di questi componenti a sua volta ha un componente di transizione. O questi rappresentati da un singolo esibitore K1E-T / τA, quindi

O

e τa è dato dall’Eq. (5.25).
La costante K1 può essere valutata sottoponendo l’equazione. (5.74) nello stato iniziale IA (α) = 0. Sostituire il valore di K1 così ottenuto nell’equazione. (5.74) reso

Poiché ia (β) = 0, dell’equazione. (5.77)

β può essere valutato mediante soluzione iterativa dell’equazione. (5.78).
Dalla caduta di tensione attraverso l’induttanza del rinforzo dovuto al componente CC della corrente di rinforzo è zero
![]()
Dove sono e i componenti DC della tensione e della corrente di rinforzo sono rispettivamente rispettivamente. Nella Figura 5.26 (6)
La corrente di rinforzo è costituita dalla componente DC IA e dalle armoniche. Quando il flusso è costante, solo il componente CC produce una coppia regolare. Le armoniche producono componenti di coppia alternativi, il cui valore medio è zero. Pertanto, la coppia del motore è sempre data dall’equazione. (5.7). Equazioni. (5.7), (5.8), (5.79) e (5.80)

Il confine tra conduzione continua e discontinua viene raggiunto quando β = π + α. Sostituendo β = π + α in Eq. (5.78) fornisce il valore critico della velocità ωmc che separa la conduzione continua dalla conduzione discontinua per un dato α come

Conduzione continua:
Nella Figura 5.26 (c)

Equazioni. (5.7), (5.8), (5.79) e

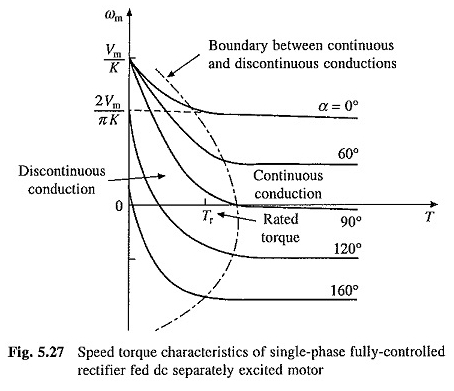
Le curve di coppia di velocità per il lettore sono rappresentate nella Figura 5.27. L’operazione ideale senza carico si ottiene quando ia = 0. Quando le due coppie di tiristore (T1, T3) e (T2, T4) non gestiscono, IA sarà zero. Ciò accadrà quando e> vs durante il periodo per il quale sono presenti impulsi stanchi.
Pertanto, quando α <π / 2, e deve essere maggiore o uguale alla VM e quando α> π / 2, e deve essere maggiore o uguale a VM sin ωt. Pertanto, nessuna velocità di carico è data da

La tensione terminale media massima (2VM / π) è scelta pari alla tensione del motore nominale. Ideale non sarà quindi alimentato la velocità di carico del motore quando è alimentato da una perfetta tensione diretta del valore nominale (2VM / πk).
È interessante notare che la velocità massima senza carico con il controllo del raddrizzatore è (π / 2) volte questo valore. Il bordo tra conduzione continua e discontinua è rappresentato dalla linea tratteggiata (Fig. 5.27).
Per le coppie inferiori a quelle classificate, un’unità bassa funziona principalmente in una conduzione discontinua. Nella conduzione continua, le linee rette parallele sono linee parallele, la cui pendenza, secondo (5.84), dipende dalla resistenza al circuito di rinforzo dell’AR.
L’effetto della conduzione discontinua è quello di rendere scarsa la regolazione della velocità. Questo comportamento può essere spiegato dai wavems di Fig. 5.26 (b) e (c). Nella conduzione continua, per un dato α, qualsiasi aumento della coppia sta eliminando ωm ed E in modo che l’IA e T possano aumentare.
La tensione terminale media rimarrà costante. Nella conduzione discontinua, qualsiasi aumento della coppia e l’aumento accompagnato dall’intelligenza artificiale portano ad un aumento di β e un calo in AV. Pertanto, la velocità scende di una quantità maggiore.
Il lettore opera nei quadranti I (Automobile Forward) e IV (frenata rigenerativa inversa). Queste operazioni possono essere spiegate come segue:
Dell’equazione. (5.84), sotto l’ipotesi di conduzione continua, la tensione di uscita CC del rettificatore varia con α, come mostrato nella Figura 5.28 (a). Quando lavori nel quadrante I, ωm è positivo e α ≤ 90 °; E le polarità di VA ed E sono rappresentate nella Figura 5.28 (b).
Per un’intelligenza artificiale positiva, ciò porta il raddrizzatore a fornire energia e il motore che lo consuma, dando così un’automobile in avanti. Le polarità di E, AI e va per il funzionamento del quadrante IV sono rappresentate nella Figura 5.28 (c). E si è invertito a causa dell’inversione di ωm.
Poiché l’IA è sempre nella stessa direzione, la macchina funziona come generatore che produce una coppia di frenata. Inoltre a causa di α> 90 °, VA è negativo, il che suggerisce che il raddrizzatore ora prende la potenza dei terminali CC e lo trasferisce al settore AC.
Questa operazione del raddrizzatore si chiama reinversione e il raddrizzatore funzionerebbe come inverter. Poiché la fornitura generata è fornita nella fonte di questa operazione, è una frenata rigenerativa.

Due capacità operative del quadrante del lettore possono essere utilizzate solo con addebiti di revisione o altre spese attive che possono guidare il motore nella direzione opposta.
Nell’operazione normale con due quadranti di un motore, è necessaria una maniglia diretta (quadrante I) e una frenata anteriore (quadrante II) che non può essere fornita dal lettore nella Figura 5.26 (a).