Drum Controller per il motore della serie DC:
I motori della serie DC sono spesso utilizzati su gru, elevatori, tram e altre applicazioni, in cui il motore è sotto il controllo diretto di un operatore. In queste applicazioni, possono essere necessarie frequenti variazioni di avvio, velocità, arresto e inversione.
Drum controller for dc series motor
Viene impiegato un controller sfruttato manualmente, più robusto di un reostato iniziale, chiamato controller del tamburo.
Il controller del tamburo è sotto forma di un tamburo rotante con segmenti che entrano in contatto con i punti fissi. Il controller di velocità di questo tipo è illustrato in FIG.
1.62 in cui K è una bobina di frenatura ad arco: EM è un elettromatico di frenata; FLS è un interruttore di rotazione in una direzione e RLS è un interruttore per la rotazione nella direzione opposta. Il controller del tamburo ha sei posizioni per la parte anteriore e sei posizioni per la rotazione opposta del motore.
Le posizioni di lavoro del controller sono rappresentate da linee appuntite verticali. L’EM elettrico è collegato in parallelo con il motore e rilascia il motore all’avvio. Quando il motore è scollegato, viene frenato meccanicamente.
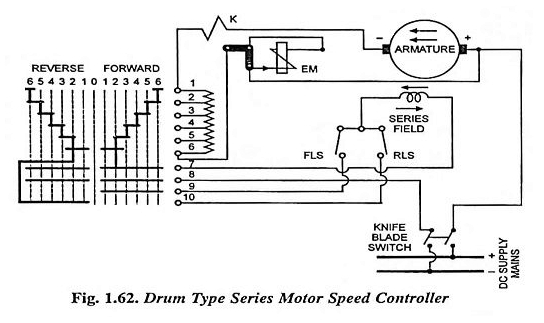
Ora, quando l’interruttore della lama del coltello è chiuso e il controller viene posizionato nella posizione anteriore 1, le connessioni sono lungo la linea verticale. In questa posizione, i segmenti stabiliscono contatti con punti fissi 6 e 7, 8 e 9.
In questa posizione, l’attuale circola dalla barra del bus + VE mediante l’avvolgimento nel rinforzo del motore, la bobina di frenatura ARC K, tutta l’avvio 1-6, i punti fissi 6 e 7 tramite segmenti di controller, l’avvolgimento di campo della serie, l’interruttore del limite anteriore, i punti fissi 9 e 8 attraverso i settori del controller e ritornano alla barra del bus negativa.
Nella seconda posizione in avanti, i segmenti del controller del tamburo entrano in contatto con i punti fissi 5 e 6, che hanno quindi messo una parte della resistenza iniziale del circuito, in modo che la velocità del motore della serie aumenti.
Nelle seguenti posizioni di trasferimento, il 3 °, 4 ° e 5 °, ulteriori passaggi nei resistori di avviamento sono usciti dal circuito e infine in 6a posizione, tutte le resistenze di partenza sono brevi e il motore raggiunge una velocità massima.
Nelle sei posizioni in avanti, la direzione della corrente in rinforzo e nell’avvolgimento del campo in serie è la stessa (da destra a sinistra), come mostrato nella Figura 1.62.
Ma nella posizione opposta, la corrente circola dalla barra del bus + venificando il rinforzo, la bobina di frenata dell’arco k, tutte le resistenze iniziali 1-6, i punti fissi 6 e 10 tramite i segmenti del controller, il rling di fronte al limite, l’avvolgimento di campo della serie, i punti fissi 7 e 8 tramite i segmenti di controller e ritorna alla barra del bus.
Di conseguenza, è ovvio che nelle posizioni di inversione, la direzione del flusso di corrente nell’avvolgimento del rinforzo rimane invariata, mentre l’opposto attraverso l’avvolgimento del campo della serie, invertendo così la rotazione del motore.