Equazione della coppia del motore a corrente continua:
Quando la tensione CC viene applicata al telaio di un motore a corrente continua con il suo campo eccitato da DC, viene sviluppata una coppia e il rinforzo funziona.
Coppia motore corrente continua
Accelera a una velocità con cui l’EMF induce negli Égis di rinforzo bilancia la tensione applicata e la seguente equazione di coppia del motore CC è soddisfatta.
![]()
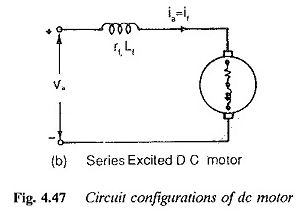
L’EB è che EMF induce nel rinforzo a causa della rotazione nel campo magnetico uniforme a velocità costante N. La natura di questo EMF è opporsi alla tensione terminale e quindi è anche chiamata EMF. Le condizioni del circuito sono rappresentate nella Figura 4.47.
La Figura 4.47 (a) rappresenta un motore eccitato separatamente dove l’eccitazione è fornita da una corrente indipendente di AI. La Figura 4.47 (b) illustra un motore in serie in cui i campi e i campi sono uguali. La tensione generata è data da

O
- Φ è un flusso per polo
- Z è un certo numero di driver Inmarg
- N è velocità nella dieta
- 2p è il numero di poli
- 2a è il numero di percorsi paralleli nel frame
Per un dato CC porta all’equazione di base della macchina di base
![]()
O 
L’equazione di coppia del motore a corrente continua sviluppata dal telaio è fornita da

KA si chiama costante di infrazione del motore.

Usando EQ 4.23 e 4.25, abbiamo

In un motore eccitato separatamente φ può essere supporre costante a una determinata corrente di campo quando la reazione del rinforzo viene trascurata o offset.
Dell’equazione. 4.27 È chiaro che la velocità di un motore a CC può essere variata modificando il valore di (va – iara).
L’equazione di coppia del motore DC viene normalmente eseguita in due modi:
- Variando il valore della tensione applicata al rinforzo, come fa nel sistema Ward Leonard (Fig. 4.48).
- Inserendo ulteriore resistenza in serie con il rinforzo (Fig. 4.49).

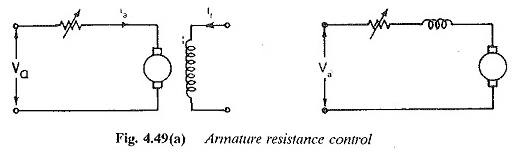

Nel primo, è richiesto un alimentatore di tensione variabile. L’operazione è senza perdita ed efficace. L’equazione di coppia del motore CC a seconda della caratteristica della velocità è illustrata nella Figura 4.50. In quest’ultimo caso, un’ulteriore resistenza inserita comporta ulteriori perdite e il motore diventa meno efficace.
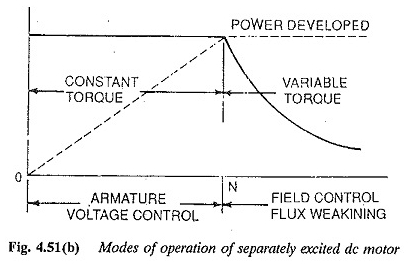
L’equazione della coppia di velocità della caratteristica del motore CC è rappresentata nella Figura 4.51. In entrambi i casi, sono possibili velocità molto piccole fino a una velocità zero. Il motore funziona a una coppia costante da zero alla velocità di base.
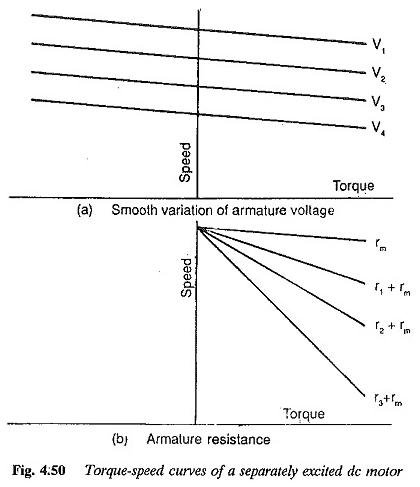

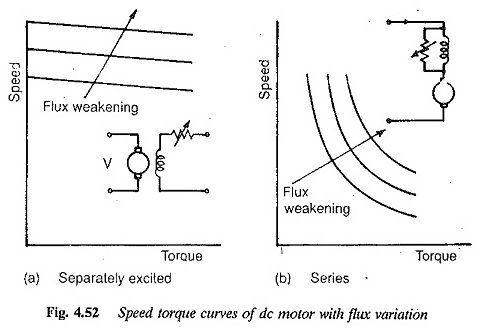
La velocità di un motore a CC è anche variata dalla variazione del flusso di campo. Le velocità al di sopra delle velocità di base sono possibili in questo metodo di controllo. Questo metodo è adatto per carichi di coppia variabili.
Il controllo della velocità mediante tensione variabile è molto efficace. Questa tensione variabile è ottenuta da un generatore. Il metodo è noto come metodo Ward Leonard. È molto versatile e ha le seguenti caratteristiche:
- Il motore può essere accelerato in una coppia costante (corrente di rinforzo costante) regolando correttamente il campo del motore.
- La frenata rigenerativa del motore è possibile e il motore può essere messo a riposo molto rapidamente.
- Quattro operativi Il quadrante del motore è semplice.
- Il costo del capitale è più elevato, perché è richiesto un set MG aggiuntivo.
- L’attrezzatura richiede spazio.
L’avvento dei tiristori e lo sviluppo di convertitori di potenza che utilizzano i tiristi hanno reso il controllo della velocità dei motori elettrici più semplice e più semplice. I rettificatori di controllo delle fasi forniscono una tensione CC variabile al telaio di un motore CC (Fig. 4.53).
Questi convertitori possono anche operare come inverter, nel qual caso è possibile la frenata rigenerativa del motore di corrente continua. Con una connessione appropriata di questi convertitori, è possibile un addestramento reversibile che consente un’automobile e una rigenerazione nelle due direzioni di rotazione.
Questi convertitori sono più flessibili, hanno una risposta più rapida e occupano meno spazio. Un sistema statico di Leonard Ward può essere reso possibile utilizzando questi convertitori.
Tuttavia, ci sono alcuni svantaggi, come un cattivo fattore di potenza sul lato CA a causa della corrente tardiva, la corrente di input non sinusoidale con un contenuto armonico ricco, ecc. La tensione di ricarica è sovrapposta da un contenuto d’onda.
La corrente di ricarica ha anche un’ondulazione con la corrente media e RMS segnala una corrente media maggiore di una. È richiesta una grande induttanza sul lato del carico per appianare la corrente. A volte la corrente di ricarica è discontinua, il che riduce le prestazioni.
Il contenuto di ondulazione influisce sul riscaldamento e la commutazione del motore. Di conseguenza, è necessario sviluppare il raddrizzatore che fornisce un alimentatore al motore che provoca pochissime variazioni delle prestazioni rispetto a un normale alimentatore a corrente continua. A volte il design del motore CC viene modificato in modo da poter essere utilizzato su qualsiasi convertitore.

Un motore CC sulla normale potenza CC richiede una resistenza di avvio per limitare la corrente di avvio. Se nutrito da un convertitore a tiristore, è possibile distribuire la resistenza di avvio e l’inizio morbido è possibile. Il motore può essere accelerato in una coppia costante.
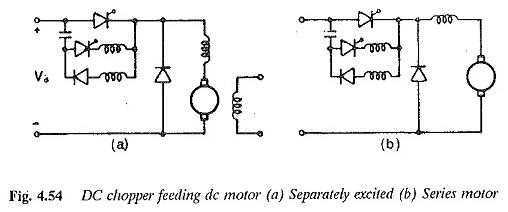
La tramoggia CC può essere interposta tra i cuscini di rotolamento a tensione fissa e il motore CC fornisce una tensione variabile al motore per controllare la velocità. In questo caso è possibile anche la rigenerazione. È possibile uno schema di Leonard Static per le operazioni di due e quattro quadranti.
La tensione di uscita Chopper è sotto forma di impulsi. Il rapporto temporale dell’elicottero può essere controllato per variare la tensione media. La corrente di uscita varia esponenzialmente durante la tonnellata e il toff dell’elicottero. La corrente di uscita varia tra due limiti.
Esiste la possibilità di una conduzione discontinua se l’ondata è più e la corrente di ricarica è piccola. La tramoggia può anche essere controllata con limiti di corrente specificati, il metodo è noto come controllo del limite corrente. Ciò corregge la frequenza degli elicotteri.
Il contenuto di ondulazione può essere limitato da una scelta appropriata di limiti. Il controllo del limite di corrente è meno soggetto a conduzione discontinua. L’aumento della frequenza degli elicotteri introduce perdite. Inizia e l’accelerazione dolci sono possibili.
Poiché la batteria fornisce cibo, i problemi di contenuto armonico e il fattore di potenza sono assenti.
Le prestazioni di un motore CC quando si operano su convertitori controllati in elicotteri di fase o CC differiscono molto dalle prestazioni quando viene azionato l’alimentazione CC normale.
Il contenuto di corrente noleggiato influisce sulle prestazioni del motore, mentre le armoniche e il cattivo fattore di potenza influenzano le prestazioni della linea. Una comprensione del comportamento aiuta a migliorare il convertitore o il design del motore, per ottenere prestazioni migliori.