Motore CC senza spazzole:
Il termine motore CC senza scopa viene applicato a numerose configurazioni di motori sincroni AC in cui viene utilizzato il controllo dei semiconduttori per controllare le correnti dello statore come la coppia massima a una determinata velocità.
In un motore convenzionale, il contattore meccanico, l’interruttore, mantiene lo spostamento dei gradi a 90 ° gradi tra i campi magnetici del rotore e lo statore per fornire la coppia richiesta.
Teoricamente, le funzioni di statore e rotore di una macchina possono essere invertite, il che mette il sistema di campo sul rotore.

Non c’è alcun vantaggio da vincere se viene utilizzata una commutazione convenzionale, poiché i tagli degli interruttori sono fissi e l’ingranaggio della spazzola deve girare alla velocità del campo del rotore.
Il passaggio ai semiconduttori per transistor o tiristi, innescati dai sensori di posizione, può tuttavia sostituire l’ingranaggio delle spazzole con una commutazione completamente elettronica, dominando le piccole macchine da un prezioso impianto di controllo.

In questo metodo, ogni fase dell’avvolgimento dello statore è sequenzialmente energetica da un transistor di potenza (o tiristore) mediante un segnale del sensore di posizione posizionato sul rotore.

A causa della retroilluminazione della posizione del rotore a tiristore / transistor, lo statore e il campo del rotore sono ancora in sincronismo perché la frequenza del trigger si regola automaticamente alla velocità del motore. La lunghezza dei tempi dei transistor determina l’ampiezza della coppia del motore.
Pertanto, mediante circuiti elettronici, la scopa senza motori di scopa può essere verificata per un’operazione di coppia costante e variabile.
I motori CC senza scopa pur essendo generalmente più costosi per la stessa nota KW, che perde e i motori spazzolati hanno alcuni vantaggi rispetto ai motori convenzionali.
Vantaggi del CC senza ginnastica:
- Richiedono poca o nessuna manutenzione.
- Hanno una vita operativa molto più lunga.
- Non vi è alcun rischio di esplosione o possibilità di radiazioni RF dovuta all’arco.
- Non producono pennelli o particelle o cambi di gas come sottoprodotti operativi.
- Sono in grado di funzionare sottoposti a fluidi, gas combustibili e possono persino essere strettamente sigillati.
- Sono generalmente più efficaci dei servitori DC a spazzole o dei motori DC convenzionali.
- Forniscono una risposta più rapida e una coppia di output abbastanza lineare rispetto alla caratteristica della corrente di input, che si presta alle applicazioni di servo.
Principio di diagramma e motore CC operativo senza scope:
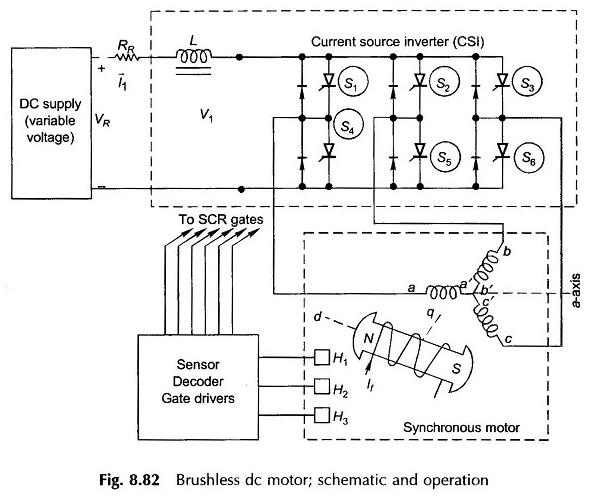
Il diagramma schematico di un motore CC di scopa è illustrato nella Figura 8.82. Mostra anche le tre fasi dello statore (rinforzo) e del rotore con assi D e Q indicati.
Lo statore è collegato a una sorgente di corrente di tensione variabile tramite un’induttanza e un inverter che include sei SCR (da S1 a S6). Invece degli SCR, il transistor di potenza o il FET potrebbe essere usato in base alla potenza del motore.
I diodi sono collegati tramite SCR per proteggerli dalla tensione L (di / dt) indotta nella bobina di rinforzo sottoposta a commutazione.
I sensori di posizione posizionati sul rotore forniscono un segnale ai decodificatori del sensore e ai driver della griglia che causano una sequenza di sequenza in sequenza per essere in sincronismo con la posizione meccanica del rotore.
Lo statore e i campi del rotore si bloccano così e rimangono in sincronismo a qualsiasi velocità del rotore.
Le correnti di fase ideali sono impulsi di ± I sono durati a 120 °, selezionare ciascuna metà e spostate l’una dall’altra a 120 ° Elect fase in fase come indicato nella Figura 8.83. Le forme di corrente reale differiscono dalle onde di corrente rettangolare ideali per aumento e caduta graduale.
Tale inverter in cui la corrente scorre sotto forma di impulsi di corrente costante è noto come serivoter di corrente (CSI).

La sequenza di tiro inverter, come mostrato nella Figura 8.83, deriva immediatamente dalle forme di corrente di fase. Per questa sequenza di tiro SCR a 120 ° o 60 °, vengono generati codici sensori distanziati selezionati utilizzando sensori di luce sensibili o effetto Hall.
La Figura 8.84 illustra il caso di spaziatura a 120 ° in cui questi sensori sensibili alla luce sono rappresentati a 120 ° fissi, ottenendo la luce da una sorgente di luce fissa.
Il rotore trasporta un disco di interruttore con un taglio di 180 ° in modo che quando funziona con il rotore, i sensori di luce ricevono una luce di 180 ° e sono buio per 180 °. I sensori producono la logica “1” mentre ricevono una luce e una logica “0” durante il buio.
È facile vedere che i tre sensori (fissi) e il disco di comunicazione (rotante con il rotore) producono una sequenza di codice del sensore come indicato nella Figura 8.83 da cui i circuiti elettronici generano impulsi di trigger per tirare SCRS nella sequenza come indicato nella figura.
La posizione relativa del disco di comunicazione può essere regolata WRT I poli del rotore (asse iewrt d e q). Per la posizione istantanea del rotore (con dischi fissati come indicato), notiamo che il codice del sensore andrà semplicemente da 101 a 100.
La fase “A” è nel mezzo del suo impulso di corrente quando la corrente passa dalla fase B a c. In questo momento, il campo dello statore risultante F̅1 è orientato lungo l’asse A come mostrato in Fig.
8.83 (la direzione positiva della corrente automobilistica si oppone alla direzione positiva dell’FMF indotto); Controlla la fase “A” applicando la regola della mano destra di Fleming. Il polo settentrionale dello statore è così orientato lungo l’asse A.

Questo Polo Nord spinge il rotore settentrionale per creare una coppia automobilistica (l’angolo tra il rotore e le n-statori di statore è β). Un indice di indice può essere realizzato sul disco switch che punta sempre allo statore settentrionale mentre il campo dello statore funziona in sincronismo con il rotore.
Questo indice fa un angolo γ con l’asse Q del rotore (asse D in ritardo di 90 °). Ovviamente (β + γ) = 90∘. L’angolo può essere regolato spostando il disco di comunicazione sull’albero collegato ai poli del rotore.

Un motore a corrente continua del magnete permanente usando sensori di effetto ambiente con spaziatura elettorale di 60 ° è illustrato nella Figura 8.85. I sensori generano logica 1 ‘se esposti a n-pole e “0” altrimenti. La sequenza del codice del sensore per questa disposizione è facilmente visualizzata ed è riportata nella Figura 8.83.
Con H3 situato lungo l’asse A, il codice del sensore alla posizione del rotore indicato va da 000 a 001, il che significa che la corrente è al centro della conduzione per la fase “A” e va da B a c. Pertanto, F1 è diretto lungo l’asse A o il polo N statore è lungo l’asse g ie
γ = 0 (vedi Fig. 8.84). I motori a magneti permanenti sono generalmente regolati per questo valore di γ (questo corrisponde a β = 90 °, meglio per la produzione di coppia).
Diagramma del circuito del motore CC senza spazzole:
Il modello di circuito Novotny-Abbas di un CSI nutrito con motori CC senza scopa è disegnato nella Figura 8.86. Le correnti (bilanciate) che fluiscono nella macchina sincrona della macchina CC senza spazzole configurate nella Figura 8.82 sono impulsi rettangolari ACC, come indicato nei wavelem della Figura 8.83.
Le correnti reali sono impulsi in qualche modo arrotondati. La nostra analisi si baserà sulla corrente di AC fondamentale e le correnti armoniche verranno ignorate. Questi producono campi di air.
Andarsene
I1 = corrente alimentata dall’inverter dalla sorgente DC
COSÌ
IM (fase corrente RMS = corrente fondamentale
= (√6 / π) i1; può essere mostrato dalla serie di Fourier
Nella Figura 8.86 (a), il modello di macchina sincrona è il solito caratterizzato dalla reattanza dell’asse rettuale sincrono XD e l’eccitazione EF EMF in cui XD ed EF variano direttamente con la velocità che governa la frequenza operativa.
L’ampiezza EF è ovviamente legata alla corrente del campo del rotore dalla caratteristica della magnetizzazione. Il diagramma di fase corrispondente è disegnato nella Figura 8.86 (b) in cui IM, la corrente di fase, viene disegnato in V (tensione di uscita / Tensione terminale della macchina sincrona) per angolo φ. L’attuale operazione leader viene eseguita perché contribuisce all’estinzione della corrente nella commutazione SCR.

Creeremo ora il modello CA di CSI con le condizioni:
- Iae = im
- Il parametro del circuito modello è la resistenza RAE.
- Ege e IAE sono in fase.
Queste condizioni garantiranno che questa parte del modello rappresenti effettivamente la macchina CC equivalente.
Vediamo anche nella Figura 8.84 che l’angolo di fase tra I̅m = ̅AE ed EF è effettivamente l’angolo γ. Ora assimilando la potenza convertita dalla fase della macchina sincrona a quella della macchina DC equivalente che abbiamo

Traduci questo risultato nel diagramma di fase (Fig. 8.86 (b)), diventa chiaro che V ed Ege sono collegati da una reattanza fittizia XE come indicato nel circuito della Figura 8.86 (a). Avremo ora la relazione per TEV e Rae. Trascurare le perdite dell’inverter

Immagina un cortocircuito a Ege, vale a dire Ege = 0, abbiamo
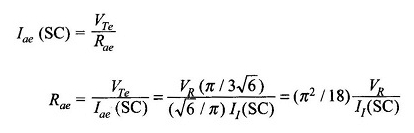
Ma
VR / I1 (SC) = RR; Resistenza al raddrizzatore interno che fornisce l’inverter
COSÌ
![]()
Caratteristiche del motore CC senza spazzole:
In riferimento alla Figura 8.84 (c)
![]()
Come già mostrato nell’equazione. (8.121)
![]()
Ma EF può essere scritto come
![]()
O
- Φf = flusso / polo causato solo dall’atto.
Sostituire i valori nell’equazione. (8.124)
![]()
O

Con l’eccezione dell’effetto di COS γ, questa equazione è la stessa della macchina DC convenzionale.
La coppia sviluppata è data da
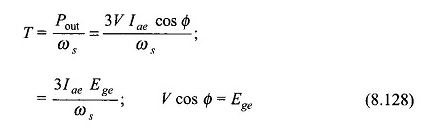
Usando l’equazione. (8.126), otteniamo
![]()
Se la caratteristica della magnetizzazione è presumibilmente lineare
![]()
Le equazioni della velocità e della coppia sono quindi
In un motore sincrono, poiché la corrente di campo è ridotta, il suo PF diventa più in ritardo. Ma in un motore CC senza spazzole (che è un motore sincrono con feedback in posizione del rotore), la diminuzione della corrente di campo se provoca un aumento della velocità in base all’equazione.
(8.131) come in un motore CC convenzionale. Questo può essere spiegato qualitativamente dal seguente ragionamento. In riferimento alla Figura 8.86 come se fosse ridotto, EF e quindi EGE sono ridotti e che RAE è molto basso, ciò provoca un aumento sproporzionato di IAE = IM.
Il risultato è l’accelerazione del rotore. L’aumento della velocità del rotore contatore della riduzione dell’EF e che IM aumenta quando la caduta di tensione IMXD aumenta con l’aumento della frequenza operativa. Il risultato è un’operazione regolare a una velocità nuova e più elevata a un numero inferiore di o persino in ritardo.
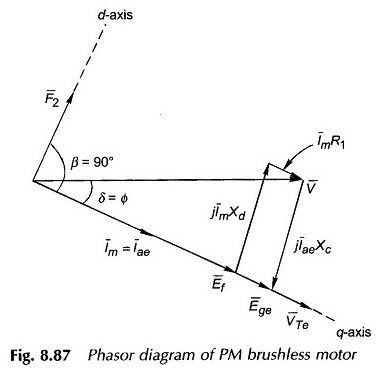
Motore DC senza scope PM:
Il piccolo motore a corrente continua PM è generalmente tipi di PM. In tale rotore del motore, MMF F2 rimane fisso e anche l’angolo γ in queste macchine è impostato su zero, il che significa che F2 e F1 (MMF di rinforzo) sono spostati con un angolo di 90 ° (meglio per la coppia sviluppata).
Inoltre, la resistenza all’avvolgimento di fase R1 non è trascurabile e quindi deve essere aggiunta a RAE nel modello DC. Il diagramma di fase per γ = 0 è disegnato nella Figura 8.87 in cui vengono fatte le seguenti osservazioni
- XC = reattanza capacitiva = xD (in ampiezza).
- L’angolo di PF è in ritardo.
La relazione delle equazioni. (8.127) e (8.129) per velocità e coppia si applicano ad eccezione dell’equazione. (8.124) ora cambia come
![]()