Tipi di motore DC:
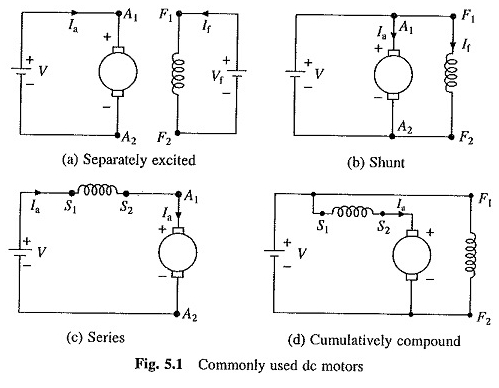
I tipi di motore di corrente comunemente usati sono rappresentati nella Figura 5.1. In un motore eccitato separatamente, le tensioni sul campo e sul rinforzo possono essere controllate indipendentemente l’una dall’altra. In un motore shunt, il campo e il rinforzo sono collegati a una fonte comune.
Motore dc – motori c.c., motori cc | motori dc & dc motori
In caso di serie in serie, la corrente di campo è la stessa della corrente di rinforzo e, pertanto, il flusso di campo dipende dalla corrente di rinforzo.
In un motore composto cumulativo, la forza magneto-motiva del campo della serie è una funzione della corrente di rinforzo ed è nella stessa direzione dell’MMF del campo di shunt.
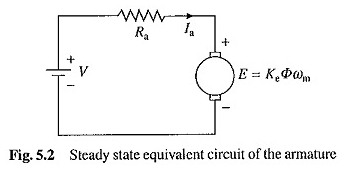
Il circuito equivalente allo stato di equilibrio del telaio di una macchina CC è illustrato nella Figura 5.2. La resistenza dell’AR è la resistenza del circuito di rinforzo.
Per i motori separatamente eccitati e shunt, è uguale alla resistenza del rinforzo del rinforzo e ai motori in serie e composti, è la somma della resistenza avvolgente del telaio e del campo. Le equazioni di base applicabili a tutti i tipi di motore CC sono

O
Φ – è il flusso per polo, webers;
Ia – la corrente di rinforzo, a;
V – la tensione del R -RIP;
Ra – la resistenza del circuito insolito, ohm;
Ωm – La velocità del rinforzo, rad / secco;
T – la coppia sviluppata dal motore, NM; E
KE – La costante del motore.
Dell’equazione. (5.1) a (5.3) 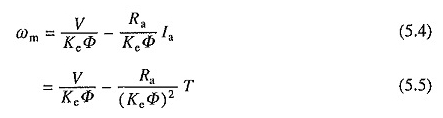
SHURS E SEXATURATTI ECCITATO:
In caso di shunt e motori eccitati separatamente, con una corrente di campo costante, il flusso può essere supporre costante. Andarsene
![]()
Quindi dalle equazioni. (5.1), (5.3) e (5.4) a (5.6)

Le caratteristiche della velocità e degli scarpo di sughero di un motore eccitato separatamente per la tensione del terminale e il campo completo sono rappresentate nella Figura 5.3. La curva di velocità Torca è una linea retta.
La velocità di carico senza carico ωm0 è determinata dai campi di rinforzo e eccitazione del campo. La velocità diminuisce all’aumentare della coppia e la regolazione della velocità dipende dalla resistenza del circuito di rinforzo (Eq. (5.10)). La solita caduta della velocità del carico completo, in caso di motore di media dimensioni,

è circa il 5%. I motori eccitati vengono utilizzati separatamente in applicazioni che richiedono buone norme di velocità e velocità regolabile.
Motore in serie:
Nei motori seriali, il flusso dipende dalla corrente di rinforzo. Nella regione caratteristica della magnetizzazione insatura, φ si può supporre che sia proporzionale all’IA. COSÌ,
![]()
Sostituendo in equazioni. (5.3), (5.4) e (5.5) danno
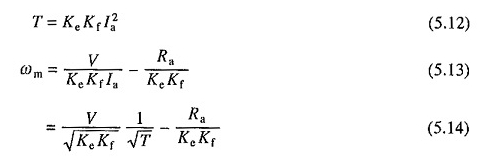
Laddove la resistenza al circuito del rinforzo RA è ora la somma dei resistori di avvolgimento del rinforzo e del campo. Le caratteristiche di Torca e Corque-Current di un motore in serie nella tensione di campo nominale e completa sono rappresentate nella Figura 5.3.
I motori della serie sono adatti per applicazioni che richiedono una coppia di partenza elevate e sovraccarichi di coppia pesanti.
Dato che la coppia è proporzionale alla corrente di rinforzo al quadrato, per lo stesso aumento della coppia, l’aumento della corrente del motore è inferiore rispetto a quello di un motore eccitato separatamente in cui la coppia è proporzionale al rinforzo.
Pertanto, durante i sovraccarichi di coppia pesante e l’avvio -UP, il sovraccarico di alimentazione sulla sorgente e il sovraccarico termico del motore sono limitati a valori ragionevoli. Secondo l’Eq. (5.14), poiché la velocità varia inversamente come la radice quadrata della coppia, la macchina funziona ad alta velocità con carico leggero.
In generale, la resistenza meccanica di un tipo di motore a corrente continua consente di funzionare fino a circa il doppio della velocità nominale.
Di conseguenza, il motore della serie non dovrebbe essere utilizzato nei dischi in cui esiste la possibilità che la coppia di carico sia abbandonata nella misura in cui la velocità può superare il valore nominale due volte.
Motore composto:
Le caratteristiche della velocità Torca e della croce di sughero di un motore composto cumulativo sono anche rappresentate nella Figura 5.3. La velocità senza carico dipende dalla forza del campo di shunt e dalla pendenza della caratteristica dalla forza del campo della serie.
I motori composti cumulativi sono utilizzati in applicazioni in cui è richiesta una caratteristica cadente simile a quella di una serie in serie e allo stesso tempo, la velocità di carico deve essere limitata a una scommessa sicura; Esempi tipici sono ascensori e vincitori.
Viene anche utilizzato nelle applicazioni di carico intermittente, in cui il carico varia da quasi nessun carico a carichi molto pesanti. In queste applicazioni, un volante può essere montato sull’albero del motore per l’equalizzazione del carico.
A parte il carico di equalizzazione sull’alimentazione, consente l’uso di un motore più piccolo. La macchina da pressa è un tipico esempio di questo tipo di applicazione.
Le caratteristiche di Fig. 5.3, che sono ottenute alla tensione terminale nominale e in campo completo, sono note come caratteristiche naturali della velocità della fessura. La velocità nominale (o pieno carico) è nota come velocità di base.
Motore universale:
Il motore universale può funzionare sia su DC che in potenza CA. È essenzialmente un motore della serie DC, con alcune differenze di costruzione; che vengono introdotti principalmente per ottenere prestazioni soddisfacenti su AC. Nel motore in serie, la coppia dipende dal prodotto della corrente del framework e dal flusso di campo.
L’inversione della tensione del terminale inverso sia il rinforzo che il flusso di campo. Pertanto, la coppia è rimasta nella stessa direzione. Pertanto, quando nutrito da una fonte CA, il motore della serie produce coppia unidirezionale.
Sebbene la coppia fluttua a una frequenza di 100 Hz tra zero e il suo valore di cresta, le sue fluttuazioni sono levigate dall’inerzia del motore e il motore funziona a una velocità uniforme.
Un semplice motore della serie DC non funziona bene su AC. Le perdite di corrente di isteresi e foucault che si verificano nei poli del campo e i yoki riducono l’efficienza del motore e aumentano il carico termico.
Il flusso alternato produce grandi correnti indotte nelle bobine che sono corti dalle spazzole durante la commutazione. Questo provoca un’eccessiva scintilla all’interruttore. Il fattore di potenza del motore è molto mediocre a causa di una grande induttanza del campo e del rinforzo.
Il motore universale è appositamente costruito per risolvere questi limiti. Oltre al rinforzo, i posti di campo e i yokes vengono anche arrotolati per ridurre le perdite di corrente di Foucault. La stratificazione ad alta permeabilità in acciaio al silicio viene utilizzata per ridurre la perdita di isteresi.
Un avvolgimento compensativo viene utilizzato in serie con il rinforzo per ridurre l’induttanza del rinforzo. L’induttanza del campo viene abbassata usando meno torri e pezzi polari poco profondi. Nonostante questi cambiamenti, se alimentati da AC, la commutazione è peggiore di quando viene alimentata la DC.
Pertanto, le loro valutazioni di potenza sono raramente maggiori di 1 kW. Non viene aumentata la velocità di carico, ma generalmente non abbastanza elevata da danneggiare il motore.
La maggior parte dei motori universali sono fatti per l’uso a velocità superiori a 3000 giri / min. Questa è la velocità massima di un motore a induzione quando fornito da un alimentatore da 50 Hz. Al di sotto di questa velocità, il motore a induzione è generalmente preferito.
Molti motori universali operano a velocità fino a 12.000 giri / min e possono salire fino a 20.000 giri / min. A causa delle alte velocità operative, il motore universale è molto più piccolo rispetto a un’induzione o un motore CC a bassa velocità di una notazione identica.
A causa dei pennelli e dell’interruttore, richiede una manutenzione frequente e ha un tempo di funzionamento relativamente breve.
Fino a poco tempo fa, il motore universale era il motore più economico in grado di funzionare ad alta velocità e avere un peso e dimensioni relativamente basso.
Tipi di motori a corrente continua o un motore a induzione a fase singola alimentata da un inverter a frequenza variabile possono diventare il suo concorrente nel prossimo futuro.
Alcune applicazioni universali del motore sono ventole, esercizi elettrici, elettrodomestici, ecc.
Motori amorevoli permanenti:
Nei motori a corrente continua del magnete permanente, l’eccitazione sul terreno è ottenuta aumentando correttamente i magneti permanenti sullo statore. Vengono utilizzati i magneti di ferriti o terre rare (cobalto samarium). Le ferriti sono comunemente usate a causa del costo inferiore, ma la macchina diventa ingombrante a causa della massima responsabilità.
Le terre rare a causa della loro elevata ridimensionamento consentono un’ottima riduzione del peso e delle dimensioni, ma sono molto costose. I motori amorevoli permanenti sono utilizzati principalmente nella gamma di poteri frazionari, ma sono disponibili fino a 5 kW.
L’uso di magneti permanenti per l’eccitazione elimina la perdita di rame nel campo e la necessità di offerte sul campo. Rispetto ai motori delle ferite nel campo, sono più efficaci, affidabili, robusti e compatti.
Il flusso di campo rimane costante per tutti i carichi che danno una caratteristica di coppia di velocità più lineare. In un motore eccitato separatamente, l’incapacità del cibo a terra può portare a uno stato di fuga. Ciò non accade nei motori amorevoli permanenti.
Poiché il flusso è costante in questi motori, la velocità non può essere controllata al di sopra della velocità di base. Questi motori hanno applicazioni in veicoli elettrici come ciclomobili, carrelli di sollevamento, sedie a rotelle, ecc.
DC Servo Motors:
Non esiste una chiara linea di condivisione tra il servo e la lesione convenzionale sul campo e i motori DC amorevoli permanenti.
I servomotori devono essere utilizzati nei sistemi di controllo della velocità e della posizione a circuito chiuso in cui i requisiti di prestazioni sono tali da non poter essere ottenuti da un normale motore a corrente continua. Un normale tipo di motore CC è progettato per ottenere buone prestazioni a pieno carico con un costo minimo.
Non fornisce una buona risposta dinamica e chiarimenti permanenti se utilizzato in un giocatore a circuito chiuso. Il servomotore, d’altra parte, è progettato per ottenere buone prestazioni dinamiche e precisione del regime permanente.
È progettato per ottenere le stesse prestazioni in entrambe le direzioni di rotazione, un elevato rapporto di coppia / inerzia, bassa attrito e coppia senza ondulazione liscia. In un tipo di motore a corrente continua, l’inerzia del telaio è proporzionale alla lunghezza e al diametro nel quadrato.
In alcuni servomotori, l’inerzia viene ridotta riducendo il diametro e aumentando la lunghezza per la stessa nota. Nelle caratteristiche a bassa potenza, in cui il controllo di corrente non è incorporato, la corrente durante il funzionamento transitorio può essere persino superiore a dieci volte la corrente nominale.
L’interruttore è progettato per ottenere una commutazione senza scintilla anche in correnti così importanti, che non sarà possibile in un motore di corrente comune. A causa di questi requisiti impegnativi, i servomotori sono molto più costosi degli attuali motori CC.
I loro appunti possono essere alcuni watt (nei servos dello strumento) a Megha Watts (Rollers d’acciaio). I piccoli servomotori sono generalmente di tipo magnete permanente.
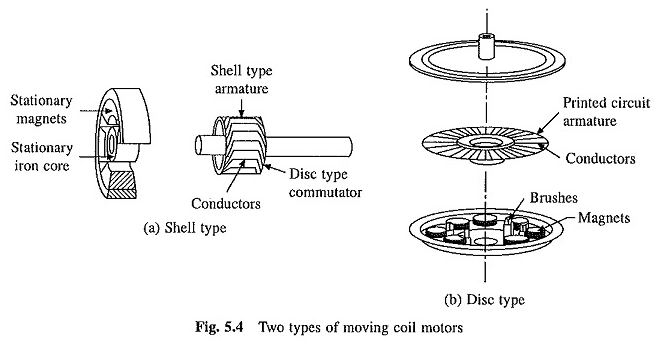
Motori a bobina in movimento:
Alcune applicazioni richiedono un’accelerazione molto più elevata di quanto si possa fare in un servomotore CC convenzionale. I rinforzi dei motori a corrente continua delle bobine mobili hanno costruzioni speciali che consentono una sostanziale riduzione dell’inerzia di rosa e induttanza, consentendo accelerazioni molto elevate. Due tipi di motori a bobina in movimento sono il tipo di shell e disco.
Tipo di guscio:
Al fine di massimizzare l’accelerazione, il rinforzo inerzia deve essere ridotto al minimo.
In un motore CC convenzionale, il rinforzo è costituito da un avvolgimento ospitato nelle slot fornite su un ciclinder di materiale magnetico, che si prevede principalmente di dare un percorso a bassa riluttanza per il campo dello statore e corre con l’avvolgimento del rinforzo. Pertanto, il rinforzo ha un’elevata inerzia.
In un motore a bobina mobile di tipo conchiglia (Fig. 5.4 (a)), il rotore è costituito solo da un avvolgimento di rinforzo. Pertanto, ha inerzia molto bassa. Un percorso a bassa riluttanza per il campo dello statore è fornito da un cilindro di materiale magnetico stazionario.
L’avvolgimento di rinforzo è costituito da conduttori assemblati per formare un cilindro a parete sottile. L’interruttore può avere una costruzione cilindrica come nei motori CC convenzionali o nella costruzione di tipi di disco.
I minuscoli motori (con diametri di circa 1 cm), chiamati micromotori, hanno un rullo di rinforzo composto da fili semplicemente varnari disposti in forma cilindrica e un interruttore di tipo disco. Questi motori sono ampiamente utilizzati in telecamere, giocatori di carte, sistemi video, ecc.
Nei motori più grandi, il rinforzo del rinforzo viene effettuato legando insieme i conduttori usando resine polimeriche e in fibra di vetro per fornire un’adeguata resistenza meccanica.
Tipo di disco o pancake:
I dettagli della costruzione sono illustrati nella Figura 5.4 (b). Il rinforzo è effettuato sotto forma di un disco o dei pancake e i conducenti del telaio assomigliano ai raggi su una ruota.
Si forma il rullo di rinforzo, ha fatto tamponare i driver da un foglio di rame, saldandoli insieme e mettendoli su un disco leggero. I segmenti del conducente vengono quindi collegati a un interruttore al centro del disco.
Si noti che la direzione del flusso è assiale e che la corrente di rinforzo è radiale. Questo è appena contrario ai motori di tipo shell (o convenzionali) in cui la corrente è assiale e il flusso è radiale. Il principio operativo è uguale a quello di un motore convenzionale a corrente continua.
I motori a bobina mobile a disco sono più robusti e disponibili in dimensioni fino a pochi chilowatt. Trovano applicazioni in cui lo spazio assiale è in un bonus come macchine utensili, dischi, ecc.
I motori a bobina spostati possono essere forniti con un gran numero di conducenti (poche centinaia). Pertanto, la coppia rimane quasi costante mentre il rotore gira. Ciò consente loro di produrre una rotazione molto fluida a bassa velocità.
L’assenza di ferro di rinforzo del motore di tipo disco elimina le perdite di nuclei associate, il che lo rende più efficace dei motori CC convenzionali. Come già indicato, la bassa inerzia e l’induttanza a bassa prestazione danno ai motori della bobina in movimento un’eccellente risposta dinamica.
Motori di coppia:
I motori CC progettati per funzionare per lunghi periodi in una condizione in un arresto o a bassa velocità sono chiamati motori a coppia. Un normale tipo di motore CC è progettato per ottimizzare le prestazioni a tutta velocità.
In piccole note, la corrente bloccata o a bassa velocità nei normali motori CC può essere da 5 a 10 volte la corrente nominale. Se questi motori possono funzionare a bassa velocità (o fermati), l’avvolgimento del telaio verrà bruciato dal surriscaldamento e l’interruttore verrà danneggiato a causa di una pesantezza.
In caso di motori di coppia, a causa del design speciale, la corrente bloccata e a bassa velocità rimane al di sotto della scommessa sicura. Alcuni motori di coppia sono progettati per funzionare a bassa velocità per intermittenza.
Le applicazioni dei motori di coppia possono essere divise in tre categorie:
- Laddove il motore deve funzionare nello stato in un fermo. Qui, l’obiettivo del motore è sviluppare una tensione o una pressione richiesta su un materiale, simile alla molla. TOOL MACCHIO, SPLIO fa parte di questa categoria.
- Nella seconda categoria, il motore di coppia è necessario per muoversi solo in poche rivoluzioni o gradi di rivoluzione. L’apertura di valvole, interruttori e dispositivi di serraggio è alcuni esempi.
- Questa categoria dell’applicazione implica un movimento continuo del motore a bassa velocità, ad esempio il lettore della bobina.