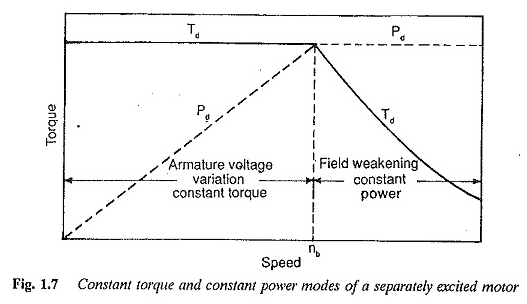
Shunt Motor DC con coppia di velocità:
La discussione precedente mostra che la variazione della tensione del rinforzo fornisce velocità striscianti. Il semplice metodo reostatico fornisce un motore shunt DC caratteristico della coppia di velocità con poca durezza e poca stabilità.
Motore shunt
Il controllo di Ward Leonard (variazione regolare della tensione), d’altra parte, produce una caratteristica piatta con ragionevole durezza e stabilità, ma un costo iniziale elevato. Un metodo semplice con un costo iniziale basso, per ottenere velocità striscianti con sufficiente durezza, è rappresentato nella Figura 1.8.
Il controllo reostatico convenzionale con resistenza in serie con il rinforzo viene modificato sparando al rinforzo con bassa resistenza. Variando i valori della serie e dei resistori di shunt, le caratteristiche del corridore di velocità possono essere progettate per avere la forma desiderata.
Nel semplice controllo reostatico che utilizza solo una resistenza in serie, la tensione attraverso il rifugio è di V. Viofino è decisa da V, qualunque sia il valore di Rs. Se il rinforzo è shunted da RSH, la tensione attraverso il telaio diventa inferiore a V anche senza carico.
La velocità vuota diminuisce al valore desiderato con valori appropriati di RS e RSH. Più piccolo è il valore di RSH, più la tensione è la tensione attraverso la cornice senza caricare. Infine, la velocità di non carico diminuisce. Il valore RSH è anche efficace nel rendere caratteristico il piatto.

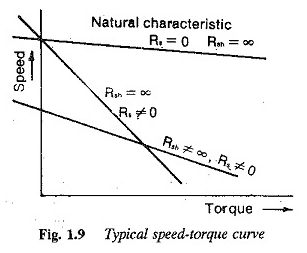
Le caratteristiche tipiche della velocità del pulcino sono rappresentate nella Figura 1.9 in cui sono le caratteristiche naturali del motore Shunt DC e la caratteristica con un semplice controllo reostatico. Questa modifica può essere utilizzata se è richiesta un’operazione stabile a bassa velocità. Può essere usato per la fermata precisa del lettore. Modificando il valore di RSH, la velocità può essere ridotta a un valore molto basso e la frenata meccanica appropriata può essere applicata per avere un arresto specifico. 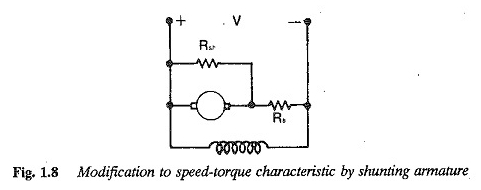
Facendo riferimento alla Figura 1.8, abbiamo 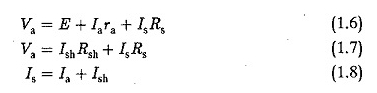
Usando queste equazioni, abbiamo

Anche dalle equazioni (1.8) e (1.7)

Usando queste relazioni nell’equazione. (1.6) Abbiamo

Sostituire / a in termini di TD, abbiamo

La caratteristica della speed-toe è rappresentata nella Figura 1.9. I seguenti punti sono chiari dalla figura:
1. La velocità di carico (TD = 0) diminuisce a 
come valore di 
Il valore RSH è inferiore, questo valore è più piccolo. La pendenza diminuisce anche se RSH è piccolo. La durezza è quindi migliorata e il funzionamento stabile è garantito in relazione al semplice controllo reostatico.
2. Il controllo a velocità regolare dipende da come sono vari RSH e RS. Il controllo della velocità è stupito perché i resistori possono variare in un marinaio sparso.
3. Cavage al di sotto della velocità di base è possibile. La velocità vuota stessa cambia dopo le variazioni di RSH. Un calo chiaro della velocità vuota può essere osservato quando l’RSH è diminuito. Il controllo della velocità si ottiene variando il valore di Rs.
Il metodo è equivalente a rendere più forte il campo e fornisce risultati simili a quelli ottenuti aumentando la corrente di campo a una determinata corrente di rinforzo.
4. Il metodo è adatto per carichi di coppia costanti, in modo che la corrente di rinforzo sia al suo valore nominale.
5. Il metodo è adatto se la fermata precisa è
6. Non è economico per il funzionamento continuo. Le perdite di RSH e RS rendono il sistema inefficace. Il metodo può essere utilizzato se sono necessarie velocità di rampa stabili per brevi periodi.