CC Engine gesloten lusbesturing:
Gesloten lusregeling van de CC -motor – Het dynamische gedrag van een systeem wordt beschreven door een reeks differentiaalvergelijkingen. Bij verschillende gelegenheden vereist de oplossing van deze vergelijkingen de evaluatie van de integralen van convolutie die een moeilijke taak kunnen zijn.
In dergelijke gevallen wordt een eenvoudiger analyse mogelijk gemaakt door transferfuncties te gebruiken met behulp van LAPLACE -transformaties.
Een overdrachtsfunctie wordt gedefinieerd voor lineaire invariante systemen zoals de verhouding van de Laplace -transformatie van de uitgangsvariabele in transformatie van de invoervariabele, ervan uitgaande dat alle beginvoorwaarden nul zijn.
Niet-lineaire systemen met een of meer parameters variërende tijd kunnen geen overdrachtsfuncties hebben omdat de Laplace-transformatie niet voor hen bestaat. Trainingssystemen met niet-lies kunnen echter worden gelineariseerd en de lineaire feedbacktheorie kan worden toegepast.
Deze systemen kunnen worden weergegeven door blokdiagrammen of signaalstroomgrafieken. In de benadering van het blokdiagram vertegenwoordigt een blok de functie van een component met zijn invoer en de uitvoer. De componentoverdrachtsfunctie is in het blok geschreven. De overdrachtsfunctie is dus van de vorm



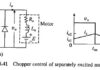
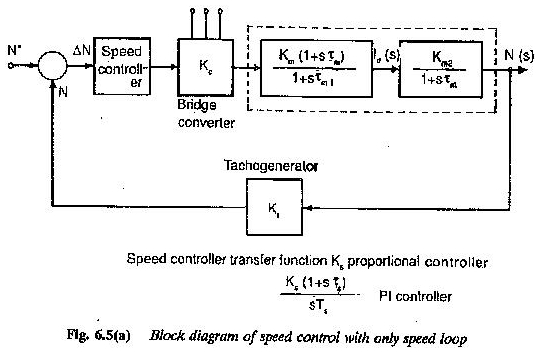
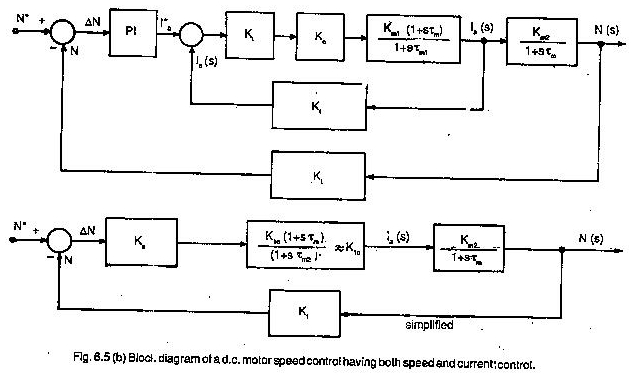
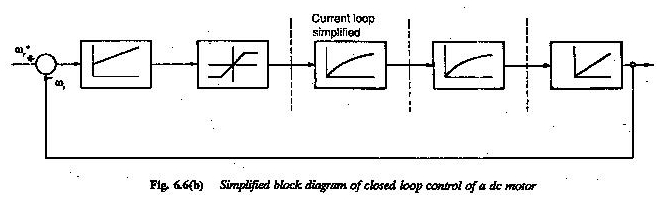
Tijdens het definiëren van de overdrachtsfunctie is de transformatie van laplace gebruikt omdat het alle differentiaalvergelijkingen omzet in eenvoudige algebraïsche vergelijkingen. Figuur 6.5 geeft een blokdiagram weer van een DC -motor in een aandrijfsysteem.
De motor heeft een versterkingspanning als een ingangsvariabele en snelheid als uitvoervariabele. De overdrachtsfunctie is in het blok geschreven.
De overdrachtsfunctie is afgeleid van alle differentiaalvergelijkingen die het gedrag van het systeem beschrijven. Het betreft echter niet de interne fysieke structuur van het systeem.
Verschillende fysieke systemen kunnen vergelijkbare overdrachtsfuncties hebben en ook vergelijkbaar dynamisch gedrag. De overdrachtsfunctie is in termen van systeemparameters en is een systeemeigenschap. Het hangt niet af van de omvang of de aard van de ingang. De hoogste kracht van S in de noemer vertegenwoordigt de volgorde van het systeem.
Een eenvoudig voorbeeld wordt gegeven in wat volgt om de eenvoud te tonen die door de overdrachtsfuncties wordt aangeboden.
Voorbeeld:
Twee RC -circuits zijn verbonden in Cascade, zoals weergegeven in figuur 6.6.
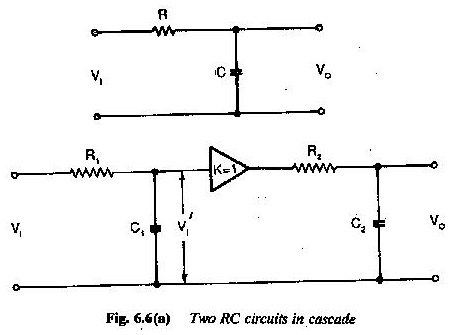
Invoer is een stappen
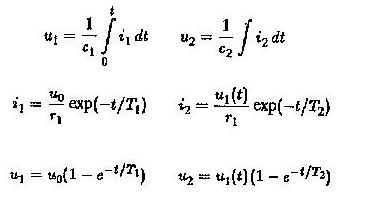
 De versterker wordt gebruikt om te werken als een CC -koppeling daartussen. Bepaal de tijdelijke variatie van U2. We weten het
De versterker wordt gebruikt om te werken als een CC -koppeling daartussen. Bepaal de tijdelijke variatie van U2. We weten het
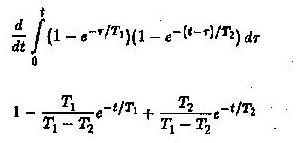
De U2 / UO -verhouding wordt verkregen door de integrale van de convolutie te beoordelen
Als nog een RC -circuit wordt toegevoegd in Cascade aan het gegeven circuit – is de evaluatie van U2 / U0 erg moeilijk.
Aan de andere kant, als de benadering van de overdrachtsfunctie wordt gebruikt, hebben we
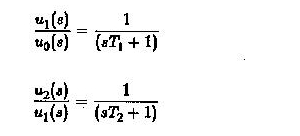
Door deze vergelijkingen te gebruiken, hebben we dat

kan heel gemakkelijk worden geëvalueerd

als gebruik van een gedeeltelijke fractie -uitbreiding.