Continue Current Motor koppelvergelijking:
Wanneer de CC -spanning wordt aangebracht op het frame van een continue stroommotor met zijn opgewonden veld door DC, wordt een koppel ontwikkeld en wordt de versterking uitgevoerd.
Het versnelt met een snelheid waarmee de EMF zich in de Égis van versterking afweegt, evenwicht tussen de toegepaste spanning en de volgende koppelvergelijking van de DC -motor is voldaan.
![]()

EB is de EMF induceert in de versterking vanwege de rotatie in het uniforme magnetische veld met constante snelheid N. De aard van deze EMF is om zich te verzetten tegen de terminale spanning en daarom wordt deze ook EMF genoemd. De circuitomstandigheden worden weergegeven in figuur 4.47.
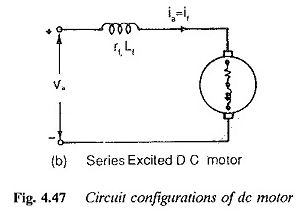
Figuur 4.47 (a) vertegenwoordigt afzonderlijk een geëxciteerde motor waar excitatie wordt geleverd door een onafhankelijke stroom van AI. Figuur 4.47 (b) illustreert een serie -engine waarin de velden en velden hetzelfde zijn. De gegenereerde spanning wordt gegeven door


Of
- Φ is een stroom door pool
- Z is een aantal Inmarg -stuurprogramma’s
- N is snelheid in het dieet
- 2p is het aantal palen
- 2a is het aantal parallelle paden in het frame
Want een bepaalde CC leidt tot de basisvergelijking van de basismachine
![]()
Of 
De koppelvergelijking van de door het frame ontwikkelde continue stroommotor wordt gegeven door

KA wordt motorbeginingsconstante genoemd.

Met behulp van Eqs 4.23 en 4.25 hebben we

In een opgewonden motor afzonderlijk kan φ constant worden verondersteld tot een gegeven veldstroom wanneer de reactie van de versterking wordt verwaarloosd of gecompenseerd.
Van de vergelijking. 4.27 Het is duidelijk dat de snelheid van een DC -motor kan worden gevarieerd door de waarde van (va – iara) te wijzigen.
De koppelvergelijking van de DC -motor wordt normaal op twee manieren uitgevoerd:
- Door de waarde van de spanning te variëren die op de versterking wordt toegepast, zoals wordt gedaan in het Ward Leonard -systeem (Fig. 4.48).
- Door extra weerstand in serie in te voegen met de versterking (Fig. 4.49).

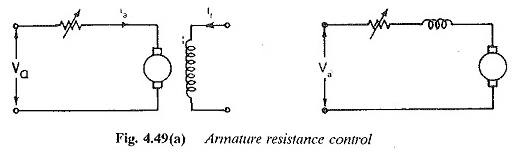

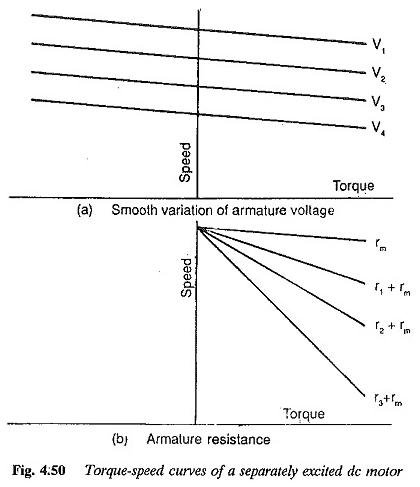
In het eerste is een variabele spanningsvoeding vereist. De operatie is verliesloos en effectief. De koppelvergelijking van de DC -motor, afhankelijk van de snelheidskenmerken wordt geïllustreerd in figuur 4.50. In het laatste is een extra ingevoegde weerstand extra verliezen en wordt de motor minder effectief.
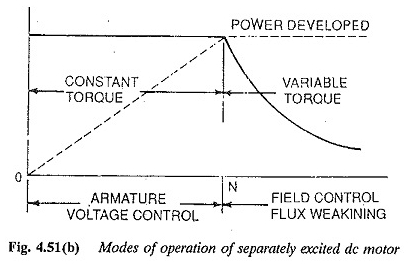
De snelheidskoppelvergelijking van het kenmerk van de DC -motor wordt weergegeven in figuur 4.51. In beide gevallen is zeer kleine snelheden tot nul snelheid mogelijk. De motor werkt bij een constant koppel van nul tot basissnelheid.

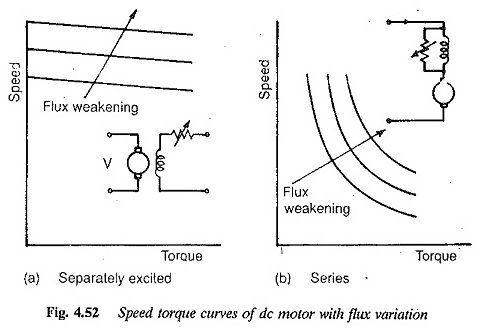
De snelheid van een DC -motor wordt ook gevarieerd door de variatie in de veldstroom. Snelheden boven basissnelheden zijn mogelijk in deze besturingsmethode. Deze methode is geschikt voor variabele koppelbelastingen.
Snelheidsregeling met behulp van variabele spanning is zeer effectief. Deze variabele spanning wordt verkregen van een generator. De methode staat bekend als Ward Leonard -methode. Het is erg veelzijdig en heeft de volgende functies:
- De motor kan worden versneld tot constant koppel (constante versterkingsstroom) door het motorveld correct aan te passen.
- Het regeneratieve motorremmen is mogelijk en de motor kan zeer snel worden gebracht.
- Vier bedienen van het motorkwadrant is eenvoudig.
- De kapitaalkosten zijn hoger, omdat een extra MG -set vereist is.
- Apparatuur vereist ruimte.
De komst van thyristors en de ontwikkeling van stroomomzetters met behulp van thyristors maakten controle over de snelheid van elektrische motoren eenvoudiger en eenvoudiger. De faseregelrichters bieden een variabele CC -spanning aan het frame van een DC -motor (Fig. 4.53).
Deze converters kunnen ook werken als omvormers, in welk geval het regeneratief remmen van de continue huidige motor mogelijk is. Door een passende verbinding van deze converters is een omkeerbare training die een auto en regeneratie in de twee rotatierichtingen mogelijk maakt mogelijk.
Deze converters zijn flexibeler, hebben een snellere reactie en bezetten minder ruimte. Een statisch systeem van Leonard Ward kan mogelijk worden gemaakt met behulp van deze converters.
Er zijn echter bepaalde nadelen, zoals een slechte vermogensfactor aan de CA -zijde vanwege de late stroom, de niet -sinusoïdale invoerstroom met een rijke harmonische inhoud, enz. De laadspanning wordt bovenop gesuperponeerd door een golfgehalte.
De laadstroom heeft ook een rimpel met middellange stroom- en RMS -rapporten aan een gemiddelde stroom groter dan één. Een grote inductie is vereist aan de zijkant van de belasting om de stroom glad te maken. Soms is de laadstroom discontinu, wat de prestaties vermindert.
Het golvende inhoud beïnvloedt het verwarmen en het veranderen van de motor. Bijgevolg is het noodzakelijk om de gelijkrichter te ontwikkelen die een voeding levert aan de motor die zeer weinig prestaties veroorzaakt in vergelijking met een normale directe stroomvoorziening. Soms wordt het ontwerp van de DC -motor gewijzigd zodat deze op elke converter kan worden gebruikt.

Een CC -motor op normaal CC -vermogen vereist de startweerstand om de start -upstroom te beperken. Wanneer het wordt gevoed van een thyristor -omzetter, kan het starten van weerstand worden verdeeld en is een zachte start mogelijk. De motor kan worden versneld tot constant koppel.
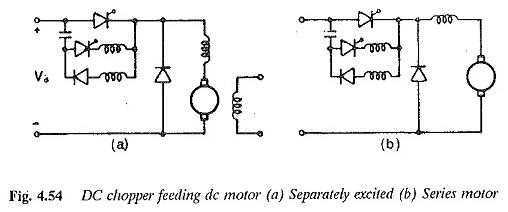
De Hopper CC kan worden tussen de vaste kussens van de vaste spanning en de CC -motor biedt een variabele spanning voor de motor om de snelheid te regelen. Regeneratie is in dit geval ook mogelijk. Een schema van Leonard Static is mogelijk voor de bewerkingen van twee en vier kwadranten.
De helikoppeluitgangsspanning bevindt zich in de vorm van pulsen. De tijdsverhouding van de helikopter kan worden geregeld om de gemiddelde spanning te variëren. De uitgangsstroom varieert exponentieel tijdens de ton en de toff van de helikopter. De uitgangsstroom varieert tussen twee limieten.
Er is een mogelijkheid van discontinue geleiding als de golving meer is en de laadstroom klein is. Hopper kan ook worden gecontroleerd met opgegeven stroomlimieten, waarbij de methode bekend staat als de huidige limietregeling. Dit corrigeert de frequentie van helikopters.
De golvende inhoud kan worden beperkt door een geschikte keuze van limieten. De huidige limietregeling is minder onderhevig aan discontinue geleiding. De toename van de frequentie van helikopters introduceert verliezen. Zoete start en versnelling zijn mogelijk.
Omdat de batterij voedsel biedt, zijn problemen met harmonische inhoud en de vermogensfactor afwezig.
De prestaties van een DC -motor bij het werken op converters die worden bestuurd in fase of DC -helikopters verschillen veel van de prestaties wanneer de normale CC -voeding wordt bediend.
De gecharterde huidige inhoud beïnvloedt de motorprestaties, terwijl de harmonischen en de slechte vermogensfactor de lijnprestaties beïnvloeden. Een begrip van gedrag helpt bij het verbeteren van de converter of motorontwerp, om betere prestaties te krijgen.