Neem contact op met de motorbesturingselement via converters:
CC -motorbesturing wordt handig en efficiënt verkregen door converters om fase te regelen waarin Ca -ingangsspanning wordt omgezet in een gecontroleerde CC -uitgang.
Het schakelproces, de overdracht van de stroom van de ene thyristor naar de andere, in deze converters is goedkoop natuurlijk of lineair schakelen. Omdat een inkomende thyristor wordt geactiveerd, maakt het het tegenovergestelde de uitgaande thyristor en dooft het.
Daarom is daarom geen extra schakelcircuit nodig. De efficiëntie van de vermogensconversie in deze converters is groter dan 95% vanwege relatief lage verliezen bij thyristors.
Deze converters worden gebruikt in de snelheidsregeling van CC-fractie-KW-motoren en in de grote motoren die worden gebruikt in de omgekeerde schijven met variabele snelheid voor rollen met motorafmetingen zo belangrijk als meerdere MW.
In bepaalde soorten converters (semi-converters) is een diode die bekend staat als de vrije wiel diode verbonden op de motoraansluitingen om de dissipatie van de energie te laten die is opgeslagen in de inductantie van de motor en om een continuïteit van de motor te bieden wanneer de thyristors worden geblokkeerd. Het biedt ook bescherming tegen overgangsoverspanningen.

Enkele halve golf converter:
Afbeelding 11.14 toont een eenfase halfgolfconverter om een geëxciteerde CC-motor afzonderlijk te besturen. Het vereist een enkele thyristor en een vrije wieldiode. In dit circuit is de motorstroom altijd discontinu, wat resulteert in slechte motorprestaties.

Dit type converter wordt alleen gebruikt voor motoren van minder dan 400 W. Het zal hier niet in detail worden beschreven; Deze komen gemakkelijk voort uit de beschrijving van golfvormen (spanning en stroom) voor de semi-converter.

Semi-converter die een opgewonden CC-motor afzonderlijk levert:
Het is een converter van een kwadrant (Fig. 11.15a) die een spanning en een stroom van een polariteit op de CC -terminals geeft. Het zorgt daarom niet voor regeneratief remmen, dat wil zeggen de stroomstroom van de regeling van de DC -motor naar AC -vermogen. Wanneer regeneratie niet vereist is, wordt deze converter gebruikt om redenen van de economie.

Figuur 11.15 (b) geeft de circuits van een semi-converter die een opgewonden CC-motorregeling afzonderlijk levert. De RA -versterkingsweerstand en de inductie worden in serie weergegeven met een EMF EMF induceert door het frame terwijl de inhessy terminale spanning is.
Hij heeft twee thyristors, twee diodes en een vrije diode met wielen (verbonden via de motoraansluitingen). Er wordt aangenomen dat de versterkingsstroom bij permanent functioneren continu is op het gehele werkbereik.
Typische permanente krachtgolven worden weergegeven in figuur 11.16. De thyristor Th1 wordt getekend bij de hoek α en Th2 onder de hoek π + α in vergelijking met de voedingsspanning ν en het proces wordt continu herhaald.

Onder reguliere omstandigheden, zoals Th1 wordt getrokken (ωt = α), is de Th1- en D2 -pijp en de motor verbonden met de voeding, dat wil zeggen νa = ν. Bij ωt = π wordt νa de neiging negatief te worden naarmate de polariteit van de inputspanning verandert.
Dit betekent dat DFW, de freewheel -diode, bevooroordeeld wordt en de versterkingsstroom die door Th1d2 stroomt, wordt overgebracht naar DFW, wat betekent dat Th1 -schakelaar (natuurlijk).
De motorterminals zijn kortgesloten via DFW voor de vrije wielperiode π <ωt <π + α die continuïteit van de versterkingsstroom biedt gedurende deze periode wanneer de motor wordt losgekoppeld van de voeding.
Bij ωt = π + α wordt Th2 getekend en het rijden Th2D1, wat betekent dat DFW wordt omgekeerd en daarom in open circuit. De motor is opnieuw verbonden met de toevoer van de volgende periode van π + α <ωt <2π. Dit proces wordt continu herhaald.
Verschillende vormen van spanning en stroomgolfgolfgolf van een opgewonden CC-motorregeling afzonderlijk gevoed door een semi-converter worden weergegeven in figuur 11.16. Hoewel de spanning tussen de motorklemmen (Fig.
11.16 (c)) bevat harmonischen die verder gaan dan een stabiele CC -waarde, hier wordt terecht verondersteld dat de motor niet op deze harmonischen reageert en daarom op constante snelheid (N) en een constante geïnduceerde FEM (EA) werkt. Aangezien Th1 ωt = α tekent, wordt de motorstroom gegeven door

Tot punt P geïllustreerd in figuur 11.16 (a); ν> ea zodat de motorstroom toeneemt. Hetzelfde geldt voor de EMF EA -motor. Tijdens deze periode, afgezien van de energie die aan de belasting wordt geleverd, wordt de energie ook opgeslagen in de inductantie van de motor (de).
Voorbij punt P, ν
Tijdens de vrije wielperiode (π <ωt <π + α) blijft de diode bevooroordeeld door de inversie van de inductieve spanning. Tijdens deze periode wordt een deel van de energie die is opgeslagen in motorinductantie verbruikt om de mechanische belasting te voeden.
De motorstroom, snelheid en FEM verminderen daarom allemaal. Dit proces wordt vervolgens herhaald tijdens de volgende periode (π + α <ωt <2π + α) via Th2D1 en later via DFW. De huidige afkomstig van het vermogen geïllustreerd in Fig.
11.16 (d) is dit deel van de versterkingsstroom dat gedurende de periodes circuleert (α, π), (π + α, 2π), … wanneer de motor is verbonden met de voeding. Het is niet nodig om de diode in een gratis wiel te gebruiken.
In zijn afwezigheid op ωt = π raakt D1 een manier bevooroordeeld voordat het vrije wiel plaatsvindt via Th1D1 totdat de Th2 is getrokken. Bij ωt = 2π gratis wiel vindt plaats via Th2d2 enzovoort.
Het is noodzakelijk om uit figuur 11.16 (d) te observeren dat de fundamentele van de huidige uit de sector te laat op de spanning is door een hoek φ1 (<α).
Discontineerde versterkingsstroom:
De versterkingsstroom wordt discontinu voor de grote waarden van de schiethoek, de hoge snelheid en lage koppelwaarden. De motorprestaties verslechteren met een discontinue versterkingsstroom. De piekverhouding tot het gemiddelde en de RMS tot een gemiddelde versterkingsstroom neemt toe.
Het is daarom wenselijk om de motor in de modus Direct Current te bedienen. Om dit te bereiken, kan een wurging van externe versterkingscircuit worden gebruikt, die de snelheid van afname van de stroom tijdens de vrije wielafwerkingen vermindert.
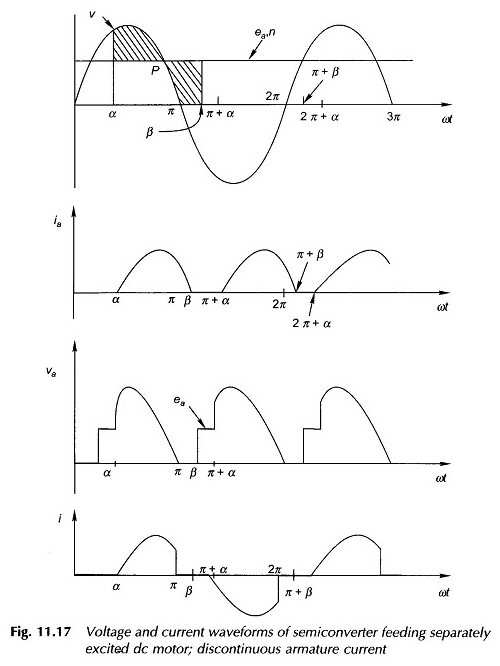
De spanning en de power wavelems voor semi-converter met discontinue stroom worden weergegeven in figuur 11.17. De motor is verbonden met de voeding via Th1d2 voor de periode α <ωt <π. Naast π is de motor kortgesloten door de diode-diode in een vrij wiel.
De versterkingsstroom valt uit nul in de hoek β (uitstervenhoek) π + α, dat wil zeggen voordat de thyristor Th2 wordt getrokken, waardoor de stroom van discontinue versterking wordt gemaakt. Tijdens α tot π, de geleidingsperiode via Th1D2, is de motoraansluitspanning hetzelfde als de ingangsspanning.
Tijdens π tot β is de spanning van de motorische terminal nul omdat de motorklemmen worden kortgesloten door de vrije wieldiode. Van β tot π + α, de kustmotor en daarom is de terminalspanning hetzelfde als de EMF induceert.
Complete converter die een opgewonden CC -motor afzonderlijk levert:

Een complete converter is een twee -quadrant converter (zie Fig. 11.18 (a)) waarin de spanningspolariteit van de output kan worden omgekeerd, maar de stroom blijft unidirectioneel vanwege de unidirectionele thyristors.
Een complete converter maakt gebruik van vier thyristors, maar er is geen vrije wieldiode vereist. Een complete converter die een opgewonden CC -motorregeling afzonderlijk levert, wordt geïllustreerd in figuur 11.18. De spanning en de stroomgolfgolven worden weergegeven in Fig.
11.19 met de hypothese dat de IA -versterkingsstroom bijna constant is. Thyristors Th1 Th3 -lead voor het interval α <ωt <π + α en verbind de motor met de voeding. Bij π + α worden de thyristors th2th4 geactiveerd.
Onmiddellijk verschijnt de voedingsspanning bij de tegenovergestelde vooringenomenheid via Th1 Th3 en dooft ze. Het is een natuurlijke of online schakelen. De motorstroom wordt overgebracht van Th1 Th3 tot Th2th4.
Aangezien er geen periode is waarin de motor wordt losgekoppeld van de voeding, is er geen gratis wiel nodig. Tijdens α tot π stroomt de energie van voeding naar de motor (ν en ik zijn positief, net als gaan en IA).
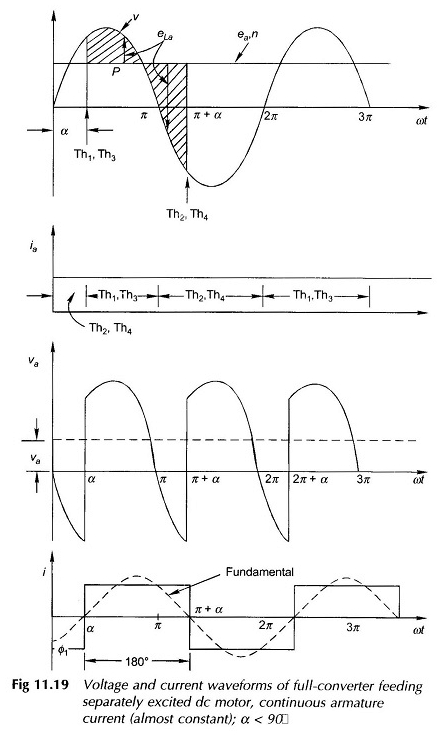
Tijdens π tot π + α wordt een deel van de motor van de motor echter teruggestuurd naar de voeding (V en ik hebben een tegenovergestelde polariteit, net als Va et IA, wat de inversie van de vermogensstroom betekent). Merk op dat de fundamentele van de stroom uit de sector achterblijft bij de spanning door hoek φ1 = α.
De spanning en de stroomgolven voor α> 90 ° worden weergegeven in figuur 11.20. De gemiddelde motorstermijnspanning is nu negatief. Als de motorterminals worden omgekeerd, zal deze fungeren als een voeding van de generator naar acvermogen.
Dit is de omkeringsbewerking van de converter en wordt gebruikt bij het regeneratief remmen van de motor. Eén punt moet hier worden opgemerkt.
Tijdens de Th1th3- of Th2th4 -geleidingsperiode naarmate de voedingsspanning negatief wordt, begint de wapeningsstroom te verminderen, waardoor het tegenovergestelde van de inductiepolariteit wordt veroorzaakt, zodat de geleidende thyristors nog steeds bevooroordeeld blijven.
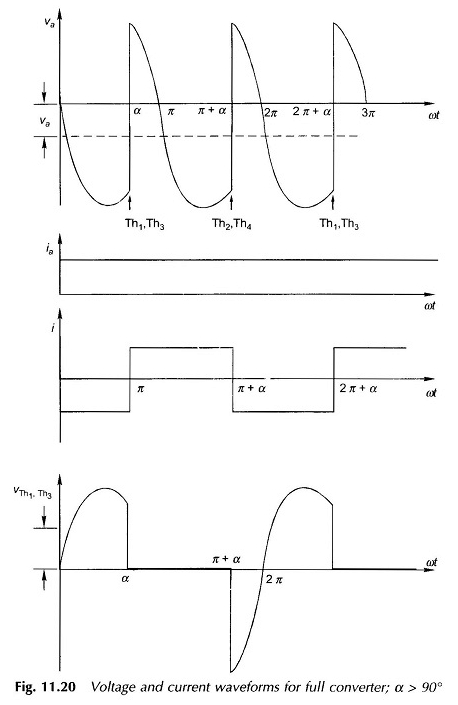
De spanning- en stroomgolfwavelems voor het geval van discontinue versterkingsstroom zijn te vinden zoals in het geval van de semi-converter. (Zie Fig. 11.20).
Koppelsnelheidskenmerken:
We nemen hier aan dat de versterkingsstroom continu is. Voor een semi-converter met een gratis diode-actie met wielen zijn de ongebruikelijke circuitvergelijkingen
Voor een afzonderlijke converter

Laat ν = √2 v sin ωt. De gemiddelde motorterminelspanningen zijn: met een semi-converter,

Met een complete converter,

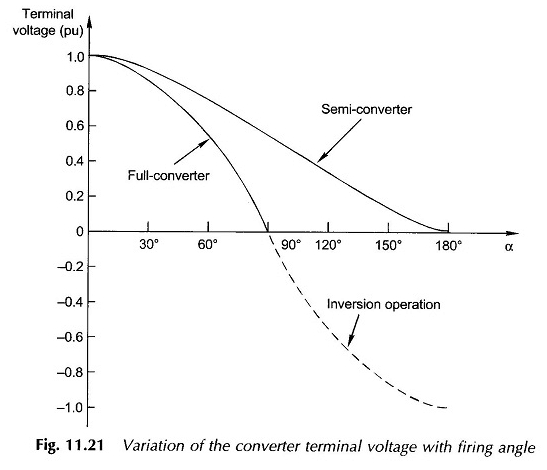
Figuur 11.21 geeft de variatie in de spanning van de motorterminal als een functie van de schiethoek voor de semi-converter en de volledige converter. In het geval van de volledige omzettingsinversie vindt plaats voor 90 ° <α <180 °.
Motorvergelijkingen voor gemiddelde waarden zijn

En

De vergelijking vervangen. (11.8) en VA van vergelijkingen (11.5) of (11.6) in de vergelijking. (11.9), de versnellingsschakelaars worden als volgt gegeven:
Met een semi-converter,

Met een complete converter

De eerste term van vergelijkingen. (11.10) en (11.11) vertegenwoordigen de theoretische snelheid van niet-lading, terwijl de tweede term de snelheidsdaling vertegenwoordigt die wordt veroorzaakt door de weerstand van de versterking. De theoretische snelheid zonder belasting kan worden gevarieerd door de hoek van het fotograferen α.
In het geval van een discontinue stroom, hangt de gemiddelde spanning op de motorklemmen af van de β -hoek (uitstervenhoek) die zelf afhangt van de snelheid van de gemiddelde motor N, de gemiddelde motorstroom IA en de hoek van schietgan. De analytische behandeling van deze zaak gaat verder dan het kader van dit boek.
Dubbele converter:
De dubbele converter kan in de vier kwadranten werken zoals weergegeven in figuur 11.22 (a). Het circuit is weergegeven in figuur 11.22 (b). Dit zijn twee volledige converters die in beide richtingen naar DC converteren. De dubbele converter biedt praktisch onmiddellijke inversie van de spanning op DC -terminals.

Motorbesturing van de DC -serie:
Semi-converters en complete converters worden ook gebruikt voor het besturen van een DC-serie-engine. De totale inductie van het circuit is hoog vanwege het serieveld, bijgevolg wiens versterkingsstroom voornamelijk continu is.
De regerende motorvergelijkingen verschillen omdat de stroom / pool nu evenredig is met de versterkingsstroom. De behandeling is anders vergelijkbaar met die van een motorbesturing met continue stroom opgewonden en zal hier niet worden voortgezet wegens gebrek aan ruimte.