Snelheidsregeling in gesloten CC -motorlus:
Controle van de CC -motor gesloten lus – converters (gelijkrichters en helikopters) worden gebouwd met behulp van halfgeleiderapparaten, die een zeer lage thermische capaciteit hebben. Daarom zijn hun tijdelijke en stabiele stromingen hetzelfde.
CC -motoren kunnen de nominale stroom 2 tot 3,5 keer transporteren tijdens overgangsactiviteiten op korte termijn, zoals starten, remmen en inversie. De stroom is hoog, het koppel is hoog en de overgangsrespons is hoger.
Daarom, wanneer een snelle respons tijdens overgangsbewerkingen vereist is, kan de motorstroom een geautoriseerde maximale waarde hebben. De converter -rating wordt vervolgens gekozen gelijk aan de maximale geautoriseerde waarde van de motorstroom.
Vanwege de belangrijke huidige notatie zullen de kosten van de converter nu hoger zijn. Wanneer de snelle overgangsrespons niet vereist is, wordt de huidige noot van de converter gekozen om gelijk te zijn aan de motorstroomkust om de kosten van de lage converter te handhaven.
De open lusschijven zijn voorzien van een stroomlimietcontrole en om de converter te beschermen tegen huidige overbelastingen.
De besturing van de gesloten lussnelheid van de CC -motordiagrammen wordt geleverd met een interne stroomregellus om de stroom binnen een veiligheidslimiet te beperken en ook om de lezer te versnellen en te vertragen in het maximaal geautoriseerde en om te tellen tijdens overgangsactiviteiten.

Er moet echter worden opgemerkt dat vertraging in het huidige of maximale koppel mogelijk zal zijn wanneer de gebruikte converter ook de rembewerkingscapaciteit heeft.
Er kan ook worden opgemerkt dat de gecontroleerde gelijkrichter zal worden gebruikt wanneer de toevoer AC is en de helikopter wordt gebruikt wanneer de voeding DC is.
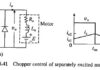
De basisbenadering van de besturing van de snelheid die onder en boven de snelheid wordt gesloten, wordt door de lezer uitgelegd in figuur 5.47. De lezer gebruikt de interne stroombesturingslus en de buitensnelheidlus.
Een dergelijke lezer werkt op een constante veldstroom en een variabele onderbrekingsspanning onder de basissnelheid, en bij een constante versterkingsspanning en een variabele veldstroom boven de basissnelheid. De versterking en het veld worden daarom gevoed door volledig gecontroleerde gelijkrichters.
Omdat de versterking wordt gevoed door een volledig gecontroleerde gelijkrichter, is het voorrem niet mogelijk; De lezer zal alleen vertragen vanwege het laadkoppel. Vanwege de controle van de interne stroom met de huidige limiter vindt de versnelling plaats geïnformeerd en tot het gemachtigde maximale koppel.
In de halfgeleideromvormer leidt Fed naar de PI (proportionele en integrale) controller vaak gebruikt omdat deze ruis filtert die anders een probleem kan worden. De PI -controller geeft ook een goede precisie aan de evenwichtstoestand.

Laten we eerst de operatie onder de basissnelheid onderzoeken. In de veldcontrolelus wordt de EMF E vergeleken met een referentiespanning E * die wordt gekozen als tussen 0,85 en 0,95 van de nominale versterkingsspanning.
De hoogste waarde wordt gebruikt voor motoren met lage versterkingscircuitweerstand. Voor snelheden onder de basissnelheid, de verzadigingsveldcontroller vanwege een grote EF -foutwaarde. De prijzenhoek van de αF -veldrichter wordt op nul gehouden, waardoor de nominale spanning op de grond wordt toegepast.
Dit garandeert de nominale veldstroom voor de werking van de motor onder de basissnelheid (ωMB). Wanneer de snelheidsreferentie wordt verhoogd van ω * m1 tot ω * m2 (ω * m2 <ωm1) vanwege een hoge snelheidsfout, verzadigt de huidige limiter de huidige referentie naar de maximale geautoriseerde waarde.
De lezer versnelt het huidige en maximale koppel dat beschikbaar is. Wanneer de snelheid in de buurt van ω * m2 bereikt, wordt de huidige limiter gedetailleerd en wordt het rijgedrag aangepast op de snelheid ωm2 en de stroom die een motorstoppel gelijk geeft aan het laadkoppel.
Als de snelheidsreferentie wordt gereduceerd tot ω * M1, wordt de huidige referentie gedefinieerd tot nul en is de lezer overgenomen vanwege het laadkoppel.
Wanneer ωm iets lager wordt dan ω * M1, stroomt de motorstroom opnieuw en leidt uiteindelijk tot regels op de snelheid ωm1 en de stroom waarvoor het motorkoppel het laadkoppel in evenwicht brengt. Voor een negatieve snelheidsfout wordt i * a gedefinieerd op nul omdat de negatieve I * A zonder gebruik is.
Hij zal echter de PI -controller opladen. Wanneer de referentiesnelheid opnieuw toeneemt, waardoor de positieve fout snelheid is, duurt de geladen PI -controller langer om te antwoorden, waardoor de respons van de voorbijgaande langzamer wordt.
Sta nu toe dat de bewerking boven de basissnelheid wordt onderzocht. Dicht bij de basissnelheid is de veldcontroller verzadigd. Als de referentiesnelheid nu wordt gedefinieerd voor een snelheid die hoger is dan de basissnelheid, wordt de huidige referentie gedefinieerd op de maximale geautoriseerde waarde.
De schiethoek van de αA -versterkingsrichter wordt verminderd tot aanvankelijk toenemen. De motor versnelt, EF neemt toe, EF neemt af, waardoor veldstroom wordt verminderd.
Aldus blijft de motorsnelheid toenemen en blijft de veldstroom afnemen totdat het motortoerental gelijk wordt aan de referentiesnelheid. Omdat de snelheidsfout nu klein zal zijn, keert terug naar een waarde dicht bij de oorspronkelijke waarde.
Aldus wordt snelheidsregeling boven de basissnelheid verkregen door veldregeling met de versterkingsspanning die in de buurt van de nominale waarde wordt gehandhaafd. In het veldbesturingsgebied (basissnelheid hierboven) reageert de lezer zeer langzaam vanwege de grote waarde van de veldtijdconstante.