Controle van de volledig gecontroleerde gelijktijdige gelijktijdige gelijkrichter van de CC -motor:
Regeling van de volledig gecontroleerde enkele fasengelijkrichter van de CC -motor wordt geïllustreerd in figuur 5.26 (a). De motor wordt aangegeven door het equivalente circuit. Veldvoedsel wordt niet weergegeven. Wanneer controle van het veld vereist is, wordt het veld aangedreven van een gecontroleerde gelijkrichter, zo niet van een ongecontroleerde gelijkrichter. De ingangsspanning wordt gedefinieerd door

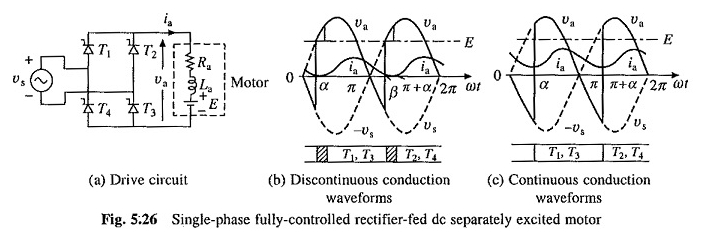

In een bronspanningscyclus ontvangen de T1- en T3 -thyristors deursignalen van α tot π, en de T2- en T4 -thyristors ontvangen (π + α) deursignalen naar 2π. Wanneer de versterkingsstroom niet continu stroomt, werkt de motor in een discontinue geleiding.
Wanneer de stroom continu circuleert, zou de geleiding continu zijn. De lezer overwoog, werkt voornamelijk in een discontinue geleiding. Discontinue geleiding heeft verschillende bedrijfsmodi.

De benadering, maar eenvoudige analysemethode wordt verkregen wanneer alleen rekening wordt gehouden met de dominante wijze van discontinue geleiding.

De spanning van de motorische terminal en de huidige golfgolven voor de modi van discontinue geleiding en dominante continue geleiding worden weergegeven in Fig. 5.26 (b) en (c).
In discontinue geleidingsmodus van de gecontroleerde gelijkrichter volledig geregelde enkele fase van de CC -motor, begint de stroom te stromen met de implementatie van de T1- en T3 -thyristors bij ωt = α. De motor is verbonden met de bron en de terminalspanning is gelijk aan VS.
De stroom, die stroomt tegen de twee, E en de bronspanning na ωt = π, valt van nul naar β. Vanwege de afwezigheid van deactivering van de huidige T1 en T3. De spanning van de motoraansluiting is nu gelijk aan de geïnduceerde spanning E. Wanneer de T2- en T4 -thyristors worden getrokken naar (π + α), begint de volgende cyclus van de motorterminal.
In de continue geleidingsmodus van controle van de volledig gecontroleerde enkele fase gelijkrichter van de continue stroommotor, circuleert een positieve stroom door de motor en zijn T2 en T4 in geleiding vlak voor α. De toepassing van roosterpulsen wordt geactiveerd op bevooroordeelde thyristors in voorste T1 en T3 op α.
De geleiding van omgekeerde vooroordelen T1 en T3 T2 en T4 deactiveert ze. Een VA -cyclus is voltooid wanneer T2 en T4 worden geactiveerd op (π + α) die de deactivering van T1 en T3 veroorzaken.
Omdat de versterkingsstroom niet perfect DC is, fluctueert het koppel van de motor. Omdat het koppel fluctueert met een frequentie van 100 Hz, is de motorinrichting in staat om schommelingen te filteren, wat een bijna constante snelheid geeft en een rimpel E.
Discontineerde geleiding:
In een volledig gecontroleerde contribierregeling met één fase van de spanning van de VA -motorbesturingsterminal werkt de lezer met twee intervallen (Fig. 5.26 (b)):
- Service -interval (α ≤ ωt ≤ β) wanneer de motor is verbonden met de bron en VA = VS.
- Nul stroominterval (β ≤ ωt ≤ π + α) wanneer ia = 0 en va = E.
Het functioneren van de lezer wordt beschreven door de volgende vergelijkingen: 
Vergelijkingsoplossing. (5.72) heeft twee componenten, één vanwege de bron ca (vm / z) sin (ωt – φ) en andere vanwege de emf ( – e / ra). Elk van deze componenten heeft op zijn beurt een overgangscomponent. Ofwel deze vertegenwoordigd door een enkele exposant K1E-T / τa, dan

Of

en τa wordt gegeven door Vgl. (5.25).
K1 -constante kan worden geëvalueerd door de vergelijking te onderwerpen. (5.74) In de begintoestand IA (α) = 0. Vervang de waarde van k1 aldus verkregen in de vergelijking. (5.74) weergegeven

Sinds ia (β) = 0, van de vergelijking. (5.77)

β kan worden geëvalueerd door iteratieve oplossing van de vergelijking. (5.78).
Omdat de daling van de spanning door de inductantie van de versterking als gevolg van de CC -component van de versterkingsstroom nul is
![]()
Waar zijn en de DC -componenten van de spanning en de versterkingsstroom zijn respectievelijk respectievelijk. In figuur 5.26 (6)
De versterkingsstroom bestaat uit DC IA -component en harmonischen. Wanneer de stroom constant is, produceert alleen de CC -component een regelmatig koppel. Harmonischen produceren alternatieve koppelcomponenten, waarvan de gemiddelde waarde nul is. Daarom wordt het motorkoppel altijd door de vergelijking gegeven. (5.7). Vergelijkingen. (5.7), (5.8), (5.79) en (5.80)

De rand tussen continue en discontinue geleiding wordt bereikt wanneer β = π + α. Het vervangen van β = π + α in vergelijking. (5.78) geeft de kritische waarde van de snelheid ωmc die de continue geleiding scheidt van de discontinue geleiding voor een gegeven α als

Continue geleiding:
In figuur 5.26 (c)

Vergelijkingen. (5.7), (5.8), (5.79) en

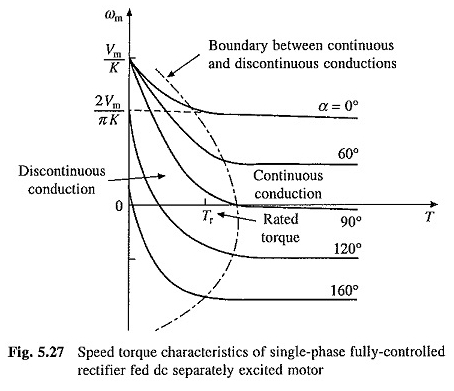
De snelheidskoppelcurves voor de lezer worden weergegeven in figuur 5.27. De ideale bewerking zonder belasting wordt verkregen wanneer Ia = 0. Wanneer de twee paren van thyristor (T1, T3) en (T2, T4) niet beheren, zal ia nul zijn. Dit zal gebeuren wanneer e> VS gedurende de periode waarvoor vermoeide impulsen aanwezig zijn.
Daarom moet, wanneer α <π / 2, E groter of gelijk zijn aan de VM en wanneer α> π / 2, e groter of gelijk moet zijn aan VM sin ωt. Daarom wordt er geen belastingssnelheid gegeven door

De maximale gemiddelde terminalspanning (2VM / π) wordt gekozen gelijk aan de nominale motorspanning. Ideaal geen motorbelastingssnelheid wanneer het wordt aangedreven door een perfecte directe spanning van nominale waarde, zal dan zijn (2VM / πk).
Het is interessant om op te merken dat de maximale snelheid zonder belasting met de gelijkrichtingsregeling (π / 2) keer deze waarde is. De rand tussen continue en discontinue geleiding wordt weergegeven door stippellijn (Fig. 5.27).
Voor lager dan beoordeelde paren werkt een lage schijf voornamelijk in een discontinue geleiding. In continue geleiding zijn de parallelle rechte lijnen parallelle lijnen, waarvan de helling, volgens (5.84), afhangt van de weerstand tegen het RA -versterkingscircuit.
Het effect van de discontinue geleiding is om de regulering van de snelheid slecht te maken. Dit gedrag kan worden verklaard uit de wavelems van Fig. 5.26 (b) en (c). In continue geleiding, voor een gegeven α, daalt elke toename van het koppel ωm en E zodat de AI en T kunnen toenemen.
De gemiddelde terminalspanning blijft constant. In de discontinue geleiding leidt elke toename van het paar en de toename die vergezeld is van AI tot een toename van β en een daling van AV. Daarom daalt de snelheid met een grotere hoeveelheid.
De lezer werkt in de I (Automobile Forward) en IV -kwadranten (omgekeerde regeneratief remmen). Deze bewerkingen kunnen als volgt worden verklaard:
Van de vergelijking. (5.84), onder de continue geleidingshypothese, varieert de CC -uitgangsspanning van de gelijkrichter met α zoals getoond in figuur 5.28 (a). Wanneer u in het kwadrant I werkt, is ωm positief en α ≤ 90 °; En de polariteiten van VA en E worden weergegeven in figuur 5.28 (b).
Voor een positieve AI leidt dit ertoe dat de gelijkrichter energie levert en de motor die deze consumeert, waardoor een auto naar voren wordt gebracht. De polariteiten van E, AI en gaat voor het functioneren van de kwadrant IV worden weergegeven in figuur 5.28 (c). E is omgekeerd vanwege de omkering van ωm.
Omdat AI altijd in dezelfde richting is, werkt de machine als een generator die een remkoppel produceert. Bovendien is VA vanwege α> 90 ° negatief, wat suggereert dat de gelijkrichter nu de kracht van CC -terminals neemt en deze overbrengt naar de AC -sector.
Deze gelijkrichter wordt omkering genoemd en de gelijkrichter zou als een omvormer werken. Aangezien de gegenereerde voorraad wordt verstrekt bij de bron van deze bewerking, is het een regeneratief remmen.

Twee bedrijfscapaciteit van het kwadrant van de lezer kunnen alleen worden gebruikt met revisiekosten of andere actieve kosten die de motor in de tegenovergestelde richting kunnen drijven.
Bij het normale werking met twee kwadranten van een motor is een directe handgreep nodig (kwadrant I) en een voorrem (kwadrant II) die niet door de lezer kan worden geleverd in figuur 5.26 (a).