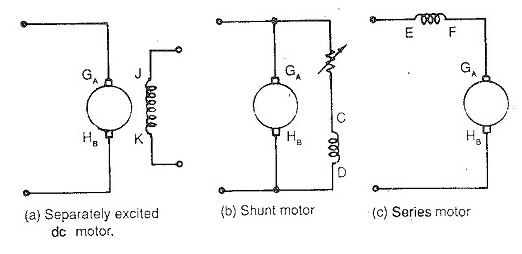
Prędkość prędkości charakterystyczna dla podekscytowanego silnika CC osobno:
Równanie obwodu charakterystycznego momentu obrotowego prędkości oddzielnie wzbudzonej prądu silnika, w tym wzmocnienia, mającym łączne przewody Z, jest zwinięte na bieguny 2p (szczotki dzielą uzwojenie na równoległe podróże 2A), IS IS, IS IS
![]()
Gdzie jest EMF z tyłu ramki podanej przez

gdzie ω jest prędkością kątową podaną przez ω = (2π N / 60), Ke i Kt mogą być



Z równań (1.1) i (1.2) otrzymujemy

Moment obrotowy opracowany przez silnik jest podawany przez

Zastąpienie AI w równaniu. (1.3) równania. (1: 4) Mamy

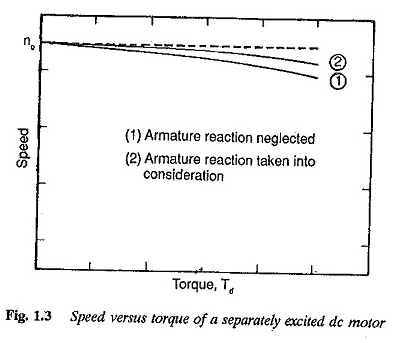
Gdy TD = 0, odpowiednia prędkość N0 = VA / (keφ) to pusta prędkość. Prędkość silnika maleje wraz ze wzrostem momentu obrotowego, co powoduje opadającą charakterystykę. Krzywe prędkości momentu obrotowego przedstawiono na rysunku 1.3. Rysunek wyraźnie pokazuje spadek prędkości 2 do 3%, ponieważ moment obrotowy zmienia się od obciążenia, który należy odnotować przy pełnym obciążeniu.
W maszynach DC zbrojenie MMF reaguje z polem MMF, reakcja ta jest znana jako reakcja integracji. Gdy efekty reakcji reakcji są zaniedbywane, przepływ przez biegun silnika jest stały i jest niezależny od obciążenia.
W normalnej konstrukcji szczotki są umieszczane w obszarze neutralnym. Po reakcji zbrojenia, choć magnetyzacji krzyżowej, następuje demagnetyzacja z powodu nasycenia. Wpływ demagnetyzacji na przepływ pola z powodu przepływu zbrojenia jest wyraźnie pokazany na rysunku 1.3. Spadek prędkości w pełnym obciążeniu zmniejsza się, poprawia regulację prędkości.
Wpływ dodatkowej rezystancji w obwodzie zbrojenia przedstawiono na rycinie 1.4. Można uzyskać prędkości plaży od zera do podstawowej prędkości. Przy odpowiedniej wartości PR możliwe są bardzo wolne prędkości, kosztem wydajności.
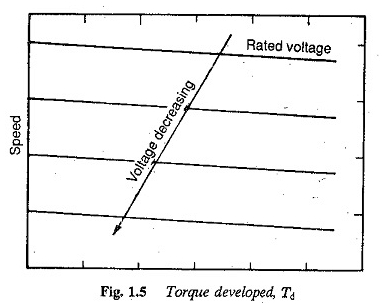
Krzywe prędkości momentu obrotowego dla gładkiej zmienności napięcia wzmacniającego przedstawiono na rycinie 1.5. Poruszają się wzdłuż osi y (osi prędkości) po zmianach w niezwykłym napięciu. Uzwojenie na podłożu silnika jest dostarczane z oddzielnego źródła.
Gładka zmiana ramy zbrojenia bardzo skutecznie prowadzi do kontroli prędkości w zero w podstawowym zakresie prędkości. Silnik działa w trybie stałego momentu obrotowego.
Ta metoda kontrolowania prędkości podekscytowanego silnika CC za pomocą zmiennego napięcia z wzmocnieniem jest stosowana w kontroli Ward Leonard.
Wpływ zmienności prądu pola na charakterystykę przyspieszania pokazano na rycinie 1.6. Prąd pola jest zmniejszony, aby osiągnąć prędkości powyżej podstawowej prędkości, gdy napięcie przerw osiągnie wartość nominalną.
Tryb przepływu przepływu najlepiej nadaje się do zastosowań o stałej mocy, ponieważ prąd wzmacniający może być utrzymywany według jego wartości nominalnej. Para maleje.
W strumieniu przepływu silnika nie można użyć do powodowania stałego obciążenia momentem obrotowym, ponieważ silnik pobiera zwiększone prądy wraz ze wzrostem prędkości. Ten tryb służy do uzyskania prędkości w podstawowym zakresie prędkości z podstawową prędkością dwukrotnie. Najwyższa prędkość osiągalna poprzez osłabienie przepływu jest ograniczone przez przełączanie.

Prąd wzmacniający może pozostać stały w pełnym zakresie prędkości zerowej przy dwukrotności podstawowej prędkości. Stałe tryby momentu obrotowego i stałą moc przedstawiono na rysunku 1.7. Operacja reprezentowana na rysunku 1.7 jest możliwa z silnikami boczkowymi również stosującymi zmienną rezystancję w obwodzie polowym.