Charakterystyka silników CC | Charakterystyka silnika bocznego:
Moc silnika CC polega na jego wszechstronności i łatwości, z jaką można uzyskać różnorodne cechy prędkości, oraz szeroki zakres kontroli prędkości, który jest możliwy bez potrzeby skomplikowanych schematów sterowania, podczas gdy utrzymuje się wysoki poziom wydajności operacyjnej.
W generatorze prędkości prędkość jest ustalona przez pierwszy silnik na wadze i pozostaje prawie stały w całej części operacyjnej charakterystyki silników prądu ciągłego, podczas gdy warunki pola są dostosowywane, aby nadać pożądane napięcie zaciskowe do danego obciążenia.
Z drugiej strony w silniku potrzeba jest zgodna z charakterystyką prędkości ciągłych silników prądu obciążenia i wykonania obciążenia z prędkością lub prędkością określoną przez regulację pola i regulację napięcia wzmacniającego na wypadek, gdyby pożądała kontrola prędkości w szerokim zakresie.

Podstawowe stosunki EMF i kilka równań zostały odtworzone poniżej:


W pracy motoryzacyjnej jest praktyczne wyrażanie tych relacji w postaci prędkości i momentu wzmocnienia, to znaczy

Obserwuje się, że EA rządzi równanie obwodu ramowego
![]()
a przepływ / biegun φ jest określany przez równoważne wzbudzenie

Oraz charakterystyka magnetyzacji maszyny z przewidywaniem, że niezwykła reakcja spowoduje zmniejszenie przepływu / bieguna.
Silniki DC są trzech typów zgodnie ze sposobem, w jaki są one podekscytowane. W silniku podniecenie boczne nie zależy od FME indukowanego przez wnętrze i jest niezależnie rządzone przez napięcie zasilania.
W związku z tym emocje związane z bocznikiem silnika zachowuje się bardziej jako odrębne podniecenie, a nie tak samo samodzielne, jak w podekscytowanym generatorze boczków.
Charakterystyka silnika bocznego:
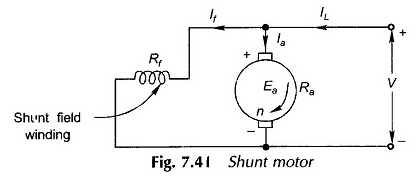
Rysunek 7.41 pokazuje schemat połączenia silnika bocznikowego. Jego działanie z ustalonym napięciem zaciskowym i stałym oporem pola, to znaczy przy prądu pola stałego bocznikowego zostanie teraz przewidziane.
Na nietypowym obwodzie EA = V – Lara (7.52)
które podczas zastępowania w równaniu. (7.48) daje

Równania (7.53) i (7.54) dają zmienność prędkości silnika z prądem wzmacniającym i momentem obrotowym jako prześledzonym na ryc. 7.42 (a) i (b). Te cechy można również wyciągnąć z prądu linii, po prostu dodając prąd pola (IL = IA + IF).
Wynika to z równania. (7.53) Ta prędkość spadnie z powodu spadającej odporności na wzmocnienie IARA, ale przeciwdziała jej spadek φ spowodowany reakcją ramki. Ponieważ efekt IARA dominuje, prędkość spada nieco z obciążeniem, jak pokazano na rysunku 7.42 (a). Zgodnie z równaniem.
(7.54), ale dla demagnetyzującego efektu prądu zbrojenia cecha T -A byłaby lekko opadająca. Prawdziwa charakterystyka momentu obrotowego jest nieco wyższa i składa się do wewnątrz ze względu na zmniejszenie przepływu / bieguna, jak pokazano na rysunku 7.42 (a).
Eliminowanie sztucznej inteligencji między równaniami (7.53) i (7.54) charakterystyka przyspieszania

Które byłoby linią prostą, ale dla zmniejszenia φ spowodowanej reakcją ramy. Prawdziwą charakterystykę rysuje się na rysunku 7.42 (b). Prędkość spada
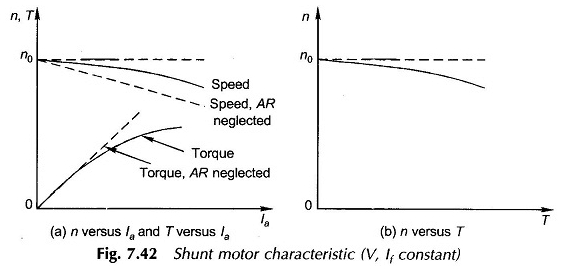
bez ładowania z pełnym obciążeniem o kilka procent; W rzeczywistości prędkość pozostaje znacznie stała. Taka charakterystyka jest znana jako cecha „bocznika”. Ważna klasa maszyny prądu przemiennego, zwana silnikiem indukcyjnym, ma również podobną cechę (NT).