Równanie obrotowego silnika ciągłego:
Gdy napięcie CC jest nakładane do ramki silnika prądu ciągłego z jego polem wzbudzonym przez DC, opracowano moment obrotowy i działa wzmocnienie.
Przyspiesza z prędkością, z jaką EMF indukuje w Égis równowagi wzmacniającego zastosowane napięcie i spełnia następujące równanie momentu obrotowego silnika DC.
![]()

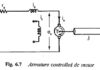
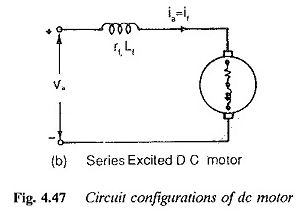
EB jest indukowaniem EMF w wzmocnieniu z powodu obrotu w jednolitym polu magnetycznym przy stałej prędkości N. Charakter tego EMF jest przeciwstawienie się napięciu końcowym, a zatem nazywa się to również EMF. Warunki obwodu przedstawiono na rysunku 4.47.
Rysunek 4.47 (a) reprezentuje podekscytowany silnik osobno, w którym wzbudzenie zapewnia niezależny prąd AI. Rysunek 4.47 (b) ilustruje silnik szeregowy, w którym pola i pola są takie same. Wygenerowane napięcie jest podane przez


Lub
- Φ jest przepływem przez słup
- Z to liczba sterowników Inmarg
- N jest prędkością w diecie
- 2p to liczba biegunów
- 2a to liczba równoległych ścieżek w ramce
Dla danego CC prowadzi do podstawowego równania maszyny podstawowej
![]()
Lub 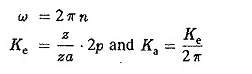
Równanie momentu obrotowego silnika prądu ciągłego opracowanego przez ramkę jest podana przez

KA nazywa się stałą silnika.

Korzystając z równania 4.23 i 4.25, mamy

W podekscytowanym silniku osobno φ może być miała stały dla danego prądu pola, gdy reakcja zbrojenia jest zaniedbywana lub przesunięta.
Równania. 4.27 Oczywiste jest, że prędkość silnika prądu stałego można zmieniać poprzez modyfikację wartości (VA – iARA).
Równanie momentu obrotowego silnika DC jest zwykle przeprowadzane na dwa sposoby:
- Zmieniając wartość napięcia zastosowanego do zbrojenia, jak odbywa się to w systemie Ward Leonard (ryc. 4.48).
- Poprzez wkładanie dodatkowej oporu szeregowo ze wzmocnieniem (ryc. 4.49).

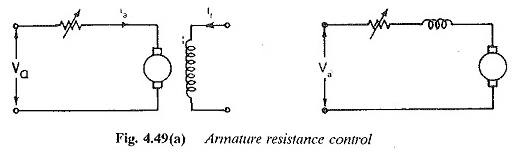

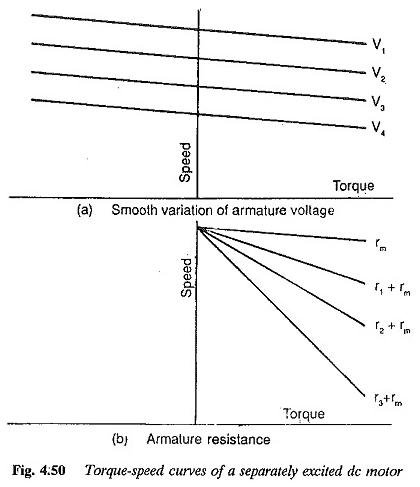
W pierwszym wymagany jest zmienny zasilacz napięcia. Operacja jest bezstratna i skuteczna. Równanie momentu obrotowego silnika DC w zależności od charakterystyki prędkości pokazano na rycinie 4.50. W tym ostatnim włożeniu dodatkowej oporności obejmuje dodatkowe straty, a silnik staje się mniej skuteczny.
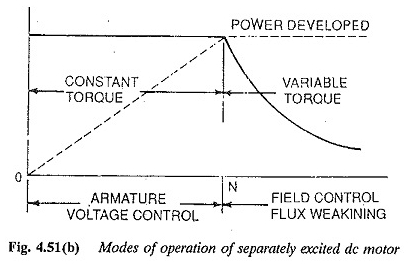
Równanie momentu obrotowego prędkości charakterystyki silnika DC jest reprezentowane na rysunku 4.51. W obu przypadkach możliwe są bardzo małe prędkości do zerowej prędkości. Silnik działa z stałym momentem obrotowym od zera do podstawowej prędkości.

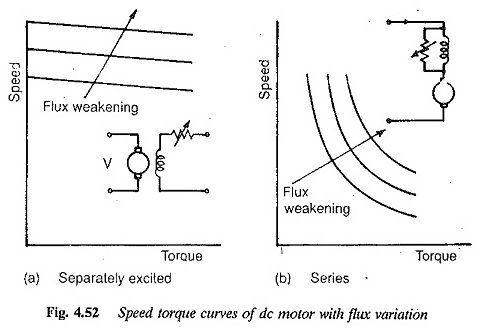
Prędkość silnika prądu stałego różni się również w zależności od zmiany przepływu pola. W tej metodzie sterowania możliwe są prędkości powyżej podstawowych prędkości. Ta metoda jest odpowiednia dla zmiennych obciążeń momentu obrotowego.
Kontrola prędkości za pomocą zmiennego napięcia jest bardzo skuteczna. To zmienne napięcie jest uzyskiwane z generatora. Metoda jest znana jako metoda Ward Leonard. Jest bardzo wszechstronny i ma następujące funkcje:
- Silnik można przyspieszyć do stałego momentu obrotowego (stały prąd wzmacniający) poprzez prawidłowe dostosowanie pola silnika.
- Możliwe jest regeneracyjne hamowanie silnika, a silnik można bardzo szybko odpocząć.
- Cztery działające kwadrant silnika jest proste.
- Koszt kapitałowy jest wyższy, ponieważ wymagany jest dodatkowy zestaw MG.
- Sprzęt wymaga miejsca.
Pojawienie się tyrystorów i rozwój konwerterów mocy za pomocą tyrystorów ułatwiły kontrolę nad prędkością silników elektrycznych. Prostownicy kontroli faz zapewniają zmienne napięcie CC do ramki silnika DC (ryc. 4.53).
Konwertery te mogą również działać jako falowniki, w którym to przypadku możliwe jest hamowanie regeneracyjne silnika prądu ciągłego. Dzięki odpowiedniemu połączeniu tych konwerterów możliwe jest odwracalne szkolenie umożliwiające samochód i regenerację w dwóch kierunkach obrotu.
Te konwertery są bardziej elastyczne, mają szybszą reakcję i zajmują mniej miejsca. System statyczny Leonard Ward może być możliwy przy użyciu tych konwerterów.
Istnieją jednak pewne wady, takie jak zły współczynnik mocy po stronie CA z powodu późnego prądu, nie -sinusoidalny prąd wejściowy z bogatą zawartością harmoniczną itp. Napięcie ładowania jest nałożone przez zawartość fal.
Prąd ładowania ma również tętnienie ze średnimi prądem i raportami RMS do średniego prądu większego niż jednego. Z boku obciążenia wymagana jest duża indukcyjność, aby wygładzić prąd. Czasami prąd ładowania jest nieciągły, co zmniejsza wydajność.
Zawartość falisty wpływa na ogrzewanie i przełączanie silnika. W związku z tym konieczne jest opracowanie prostownika, który zapewnia zasilanie silnika, który powoduje bardzo niewiele zmian wydajności w porównaniu z normalnym zasilaczem prądu stałego. Czasami konstrukcja silnika prądu stałego jest modyfikowana, aby można go było stosować na dowolnym konwerterze.

Silnik CC na normalnej mocy CC wymaga oporu początkowego, aby ograniczyć prąd rozpoczęcia. Po odżywaniu z konwertera tyrystorowego można rozłożyć opór początkowy i możliwe jest miękki start. Silnik można przyspieszyć do stałego momentu obrotowego.
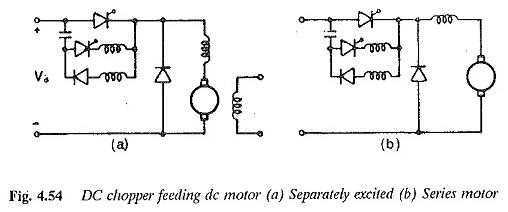
Koper CC może być wniesiony między poduszkami do walcowania o stałym napięciu, a silnikiem CC zapewnia zmienne napięcie silnika do sterowania prędkością. W tym przypadku regeneracja jest również możliwa. Schemat Leonarda Static jest możliwy dla operacji dwóch i czterech kwadrantów.
Napięcie wyjściowe helikoptera ma postać impulsów. Współczynnik czasu śmigłowca można kontrolować, aby zmieniać średnie napięcie. Prąd wyjściowy zmienia się wykładniczo podczas TON i toff helikoptera. Prąd wyjściowy różni się między dwoma granicami.
Istnieje możliwość nieciągłego przewodnictwa, jeśli falowanie jest większe, a prąd ładowania jest niewielki. Hopper można również sprawdzić z określonymi limitami prądu, przy czym metoda jest znana jako bieżąca kontrola limitu. To koryguje częstotliwość helikopterów.
Treść zrzucania może być ograniczona przez odpowiedni wybór limitów. Kontrola granic prądu jest mniej podlegająca nieciągłym przewodnictwu. Wzrost częstotliwości helikopterów wprowadza straty. Możliwe są słodki początek i przyspieszenie.
Ponieważ bateria zapewnia żywność, problemy z zawartością harmoniczną i współczynnik mocy są nieobecne.
Wydajność silnika prądu stałego podczas pracy na konwerterach kontrolowanych w helikopterach fazowych lub DC różnią się bardzo od wydajności po obsłudze normalnego zasilania CC.
Charterzona obecna zawartość wpływa na wydajność silnika, a harmoniczne i słaby współczynnik mocy wpływają na wydajność linii. Zrozumienie zachowania pomaga poprawić konwerter lub projekt motoryczny, aby uzyskać lepszą wydajność.