Silnik CC napędza podekscytowanie osobno osobno:
Układ obwodu podekscytowanego jednopoziomowego autokarów w kształcie jednopoziomowego CC powoduje szkolenie dostarczone z kontrolowanego pojedynczego konwertera fazowego pokazano na rysunku 4.56. Blok 1 może być jednym z pojedynczych konwerterów w fazie.

Napędy pół-końcowe: trening silnika CC, który jest podekscytowany osobno osobno, jest dostarczany od obwodu półfalowego do jednej fazy (ryc. 4.56 (a)). Tanie koszty i prostota są zaletami tego dysku. Może to zapewnić tylko jedną operację kwadrantu. Regeneracja nie jest możliwa.

Kąt przewodzenia tyrystora jest bardzo mały, co powoduje bardzo niski średni prąd. Opracowana para jest bardzo niska, co prowadzi do utraty momentu obrotowego nominalnego RMS. Współczynnik prądu RMS / środkowy jest również więcej. Prąd silnika jest zawsze nieciągły.
Częstotliwość falowania jest równa częstotliwości zasilania. Fala fali prądu i napięcia przedstawiono na rysunku 4.57.



Bezpłatna dioda koła poprzez obciążenie poprawia wydajność. Regulacja prędkości jest bardzo słaba. Przy niskiej prędkości silnik otrzymuje moc strączkową, a silnik można przekształcić, gdy obciążenie jest wysokie. Oscylacja prędkości jest dość wysoka.
Transformator mocy ma wstępną akcję ze względu na komponent CC prądu ładowania. Zastosowanie tego dysku jest ograniczone do niskich mocy.
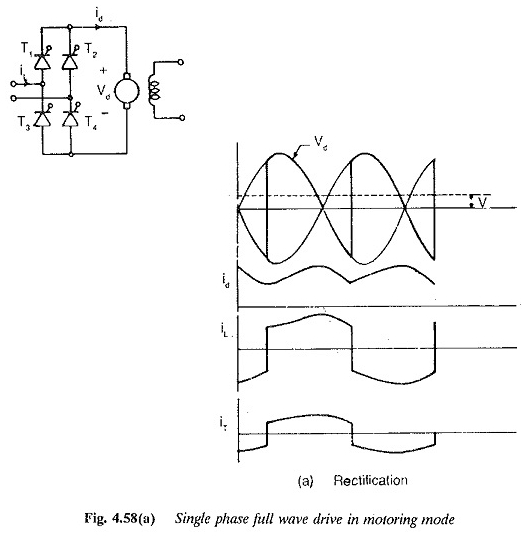
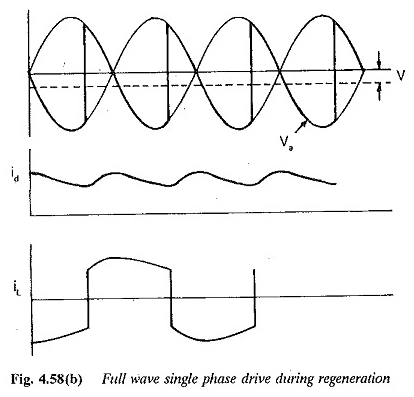
Kompletne dyski falowe: DC Wzbudzone jest oddzielnie podekscytowane konwerterem fali. Pełny gracz fali za pomocą w pełni kontrolowanego konwertera pokazano na rysunku 4.56 (b). Fale napięcia i fali prądowej przedstawiono na rysunku 4.58.
Mając tyrystory na wszystkich pozycjach, strzelanie tyrystorowe pozwala na ujemne średnie napięcia, co powoduje przepływ mocy żywności. Silnik można skutecznie spowolnić za pomocą hamowania regeneracyjnego. Może to być możliwe dla stałego prądu.
Ponieważ prąd ładowania krąży zarówno podczas dodatnich, jak i ujemnych pół-cykli, średnia wartość prądu jest większa niż w połowie niejasnej. Pojemność momentu obrotowego wzrasta dla danego ogrzewania wzmacniającego. Raporty PIC do Medium i RMS są tutaj lepsze.
Oscylacja prędkości jest mniejsza. Regulacja prędkości poprawia się ze względu na wzrost przewodnictwa prądu w obciążeniu. Liczba impulsów wynosi dwa, a częstotliwość impulsu w obciążeniu wynosi 2f. W tym przypadku amplituda tętnienia jest mniejsza. Oscylacje prędkości są zmniejszone.
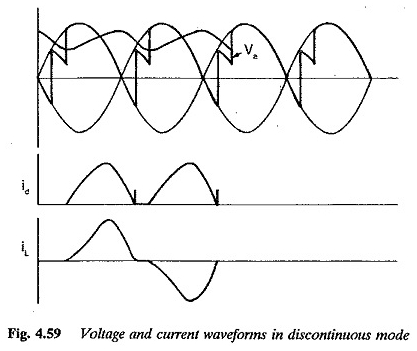
Nieciągłe przewodnictwo jest obecne, a falowniki dla tego przypadku przedstawiono na rysunku 4.59. Wpływa to na regulację prędkości. Dodatkowa indukcyjność wzmocnienia poprawia wydajność.
Zmniejsza zawartość falowania, zmniejsza możliwość nieciągłego przewodzenia, wynagrodzenia regulacji prędkości itp. Indukcyjność ta wpływa również na wydajność jazdy po stronie linii.
Zawartość harmoniczna prądu linii jest bardziej niż niższe wartości indukcyjności ze względu na możliwy nieciągły prąd obciążenia. Wraz ze wzrostem indukcyjności czynnik harmoniczny maleje. Maksymalna wartość prądu zmniejsza się wraz z dodatkową indukcją. Poprawia to pojemność przełączania.
Silnik może być zaprojektowany z wysoką wartością indukcyjności zbrojenia. W przeciwnym razie dodatkowa indukcyjność zajmuje przestrzeń. Indukcja nie ma wpływu na podstawowy współczynnik przemieszczenia. Ta indukcyjność może wystąpić niewielka poprawa współczynnika mocy, ponieważ na czynnik harmoniczny ma wpływ na tę indukcję. Poważna wada z w pełni kontrolowanym konwerterem jest zły współczynnik mocy.
Szkolenie pełnej fali karmione z półwątkowego jest reprezentowane na rycinie 4.56 (c).

Fale napięcia i fali prądowej przedstawiono na rysunku 4.60. Odniesienie na rysunku 4.60 pokazuje, że zasilacz jest w impulsach i przepływach dla (π-α) Wynika to z naturalnego swobodnego koła zapewnianego przez diody w celu utrzymania prądu ładowania.
Oferta nie zapewnia prądu podczas wolnego koła. Ma to wyraźną przewagę, w porównaniu do w pełni kontrolowanego czytelnika, że podstawowy współczynnik ruchu w prądu linii jest lepszy.
Jednak wraz ze spadkiem prędkości, to znaczy, że kąt strzelania jest opóźniony, podstawowy współczynnik przemieszczenia zmniejsza się. Trening półkonwertera pokazuje zwiększoną zawartość harmoniczną przy niskiej prędkości. Wynika to ponownie z zależności od szerokości obecnego impulsu od kąta strzelania.
Wartość grzebienia jest mniejsza ze względu na wolne koło. Poprawia to pojemność przełączania silnika, szczególnie przy niskiej prędkości i lekkich obciążeniach. Prąd RMS jest również mniejszy w półstarze, co zmniejsza ogrzewanie silnika w porównaniu z tym w pełni kontrolowanym.
Ogrzewanie silnika jest o 44% mniejsze. Nieciągłe przewodnictwo jest obecne przy lekkich obciążeniach i przy niskich prędkościach, co powoduje niższą regulację prędkości niż całkowity konwerter.
Wolne koło nie zezwala na ujemne wycieczki do napięcia obciążenia, dlatego nie jest możliwe średnie napięcie ujemne. Dlatego z czytnikiem kwadrantu stosuje się pół-konwerter, w którym nie wymaga regeneracji.
Zalety ulepszonego współczynnika zasilania, lepszej zdolności przełączania i niskich kosztów ze względu na diody powodują, że czytnik półkonwertera ma zastosowanie do wszystkich przypadków, w których regeneracja nie jest wymagana.
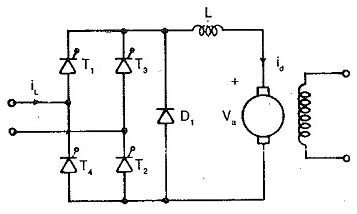
Zapasowanie mocy reaktywnej, a tym samym poprawy podstawowego współczynnika ruchu można uzyskać za pomocą kompletnego przetwornika z diodą wolnego koła. Schematyczny schemat konwertera dostarczający monofazję z wzbudzonym CC osobno pokazano na rycinie 4.56 (c).
Dioda stanowi alternatywną ścieżkę do ładowania prądu i zapewnia takie same efekty, jak w półwątle. Bezpłatna dioda koła jest skuteczna w pełnym zakresie prędkości. Dioda nie upoważnia negatywnych napięć obciążenia, dlatego nie ma regeneracji.

Możliwe jest posiadanie trybu regeneracji oprócz zalet wymienionych powyżej podczas rektyfikacji poprzez posiadanie tyrystorów z opcjonalnym wolnym kołem. Dwa tyrystory (T2, T4 dla symetrycznego połączenia; T3, T4 dla asymetrycznego połączenia) w pełni kontrolowanego konwertera są rysowane na α = 0, dzięki czemu działają one jako diody, aby zapewnić wolne koło podczas rektyfikacji (ryc. 4.61). Podczas inwersji działają jak normalni iHyristors. Dioda swobodnych jest również zastępowana tyrystorem, który jest rysowany na a = 0, gdy wymagane jest wolne koło i jest blokowane, gdy nie jest wymagane. Ten opcjonalny wolny koel oferuje wszystkie zalety przetwornika kwadrantu, a także możliwą wydajność odwrócenia. Można jednak zauważyć, że te zalety nie występują podczas odwrócenia.