CC CC Control oddzielnie:
Kontrola samochodów: Tranzystorowe sterowanie rozcięciem silnika CC, który jest podekscytowany osobno, pokazano na rysunku 5.41 (a). Tranzystor TR jest okresowo obsługiwany z okresem t i pozostaje na tonę czasu trwania.
Bieżące wylęganie działa wystarczająco wysoka, aby zapewnić ciągłe przewodzenie. Fasy napięcia silnika VA i prądem zbrojenia IA do ciągłego przewodzenia przedstawiono na rysunku 5.41 (b). W okresie w okresie tranzystora, 0 ≤ t ≤ ton, napięcie zaciskowe silnika wynosi V.


Operacja jest opisana przez


W tym przedziale prąd zbrojenia przechodzi z IAL do IA2. Ponieważ silnik jest podłączony do źródła w tym przedziale, nazywa się on interwałem serwisowym.

Przy t = ton TR jest zatrzymany. Prąd silnika Wolne koła przez diodę DF i napięcie zacisku silnika wynoszą zero podczas przedziału ≤ t ≤ t. Działanie silnika w tym przedzia

Prąd silnika maleje z IA2 do IA1 w tym przedziale.
Tona raportu interwału funkcji w okresie T -Chopper nazywa się raportem serwisowym lub cyklem serwisowym (δ). Więc

Na rysunku 5.41 (b)

Obowiązują również równanie (5.2) i (5.7)

Równania. (5.7), (5.8). i (5.114)

Charakter charakterystyki momentu obrotowego prędkości przedstawiono na rycinie 5.43.
Hamowanie regeneracyjne:
Kontrola śmigłowców silnika CC wzbudzonego osobno w celu obsługi hamowania regeneracyjnego pokazano na rysunku 5.42 (a). Tr tranzystor TR działa okresowo z okresem t i toną.
Fasy napięcia silnika VA i prądem zbrojenia IA do ciągłego przewodzenia przedstawiono na rysunku 5.42 (b). Zwykle dodaje się zewnętrzną indukcyjność w celu zwiększenia wartości. Gdy TR jest zapalone, wzrost z IA1 do IA2.
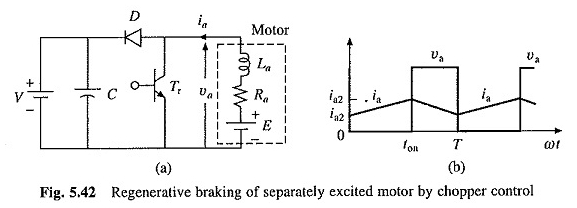
Energia mechaniczna przekształcona w energię elektryczną przez silnik, obecnie działający jako generator, częściowo zwiększa energię magnetyczną przechowywaną w indukcyjności obwodu zbrojeniowego, a reszta jest rozpraszana w rezystancji i tranzystorze ramy.
Gdy TR jest wyłączony, prąd zbrojenia przechodzi przez diodę D i źródło V, i przechodzi od IA2 do IA1. Przechowywana energia elektromagnetyczna i energia dostarczana przez maszynę są dostarczane ze źródłem.
Interwał 0 ≤ t ≤ ton nazywany jest teraz interwałem magazynowania energii i przedziałem ton ≤ t ≤ t interwał usługi. Jeśli δ jest ponownie zdefiniowane jako raport z interwału usług w okresie t, to

Na rysunku 5.42 (b)

i rysunek 5.42 (a)

Ponieważ jest odwrócony
![]()
Równania. (5.8), (5.118) i (5.119)

Charakter charakterystyki momentu obrotowego prędkości przedstawiono na rycinie 5.43.

Hamowanie maszynowe i regeneracyjne:
Obwody leja. 5.41 i 5.42 można połączyć, aby uzyskać helikopter dwie kwadranty na rysunku 5.44, które mogą zapewnić operacje hamowania uchwytu i regeneracji z przodu. Tranzystor TRL z diodą D1 tworzy obwód śmigłowca podobny do obwodu z ryc.
5.41, a zatem zapewnia kontrolę nad działaniem bezpośrednich samochodów. Tranzystor TR2 z diodą D2 tworzy obwód śmigłowca podobny do rysunku 5.42, a zatem daje kontrolę przedniego hamowania.
Tak więc, dla operacji jazdy tranzystor TRL jest sprawdzany, a dla operacji hamowania tranzystor TR2 jest kontrolowany. Zmiana kontroli z TRL na TR2 przechodzi od operacji samochodowej do hamowania i odwrotnie.
W urządzeniach usługowych, w których konieczne jest szybkie przejście z samochodu do hamowania i odwrotnie, TRL i TR2 są kontrolowane jednocześnie. W okresie T TRL otrzymuje napęd drzwi od 0 do δT, a TR2 otrzymuje napęd drzwi z δT do T, gdzie δ jest raportem serwisowym dla TRL.
W związku z tym od silnika 0 do ΔT jest podłączony do źródła przez TRL lub D2, w zależności od tego, czy prąd silnika IA jest dodatni czy ujemny. Od tego okresu, w tym okresie, obecna wskaźnik zmian jest zawsze dodatni.
Podobnie, od δT do T, wzmocnienie silnika jest zwarte przez D1 lub Tr2 w zależności od tego, czy AI jest dodatnia czy ujemna, a w tym okresie obecna szybkość zmiany jest zawsze ujemna. Napięcie zacisku silnika i fali fali prądowej przedstawiono na rysunku 5.44 (b).
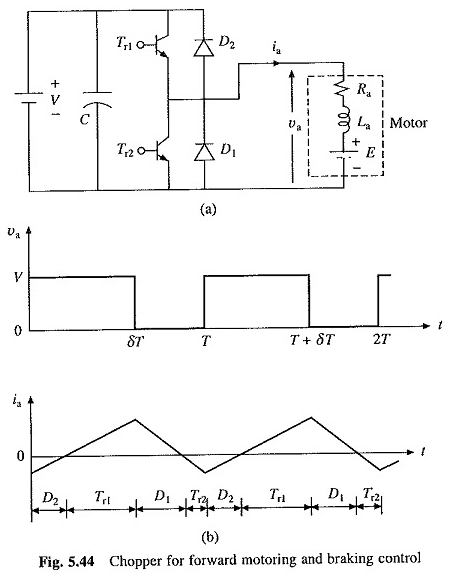
Na rysunku 5.44 (b)

Powyższe równanie sugeruje, że działanie silnika (+ ve IA) ma miejsce, gdy δ> (E / V) i operacja hamowania regeneracyjnego zachodzi, gdy Δ <(E / V) i przejście samochodowe do hamowania i odwrotnie występuje, gdy δ = (E / V).
Powyższe równania są podobne do tych uzyskanych dla helikoptera na ryc. (5.41), a zatem biorąc pod uwagę te same liczby
Dynamiczne hamowanie:
Dynamiczny obwód hamowania i jego falelem są reprezentowane na rysunku 5.45. W przedziale 0 ≤ t ≤ tonę AI wzrasta z IA1 do IA2. Część wytwarzanej energii jest przechowywana w indukcyjności, a odpoczynek jest rozpraszany w RA i TR. W trakcie tony przedziałowej ≤ t ≤ t spadek z IA2 do IA2.
Energie wygenerowane i przechowywane w indukcyjności są rozpraszane w odporności hamowania RB, RA i Diode D. Tranzystor TR kontroluje amplitudę energii rozproszonej w RB, a zatem kontroluje jej wartość efektywną.

Jeśli AI ma być DC bez fal
![]()
Średnia moc zużywana przez RB

Skuteczna wartość RB

Lub

Równanie (5.122) pokazuje, że efektywną wartość rezystancji hamowania można zmienić bez etapu od 0 na RB, ponieważ δ jest kontrolowane od 1 do 0. Gdy prędkość spadnie, δ można zwiększyć bez kroku, aby spowolnić silnik do stałego maksymalnego momentu, jak pokazano na rysunku 5.8 przez linię, która ma być pobierana przez łańcuch.