Kontaktowanie się z kontrolą silnika za pośrednictwem konwerterów:
Kontrola silnika CC jest uzyskiwana dogodnie i wydajna przez konwertery w celu sterowania fazą, w której napięcie wejściowe CA jest przekształcane w kontrolowane wyjście CC.
Proces przełączania, przeniesienie prądu z jednego tyrystora do drugiego, w tych konwerterach jest tanio naturalne lub liniowe. Ponieważ aktywowany jest nadchodzący tyrystor, czyni to przeciwne wychodzącego tyrystora, gasiąc go.
Dlatego nie jest konieczne dodatkowe obwód przełączania. Wydajność konwersji mocy w tych konwerterach jest większa niż 95% z powodu stosunkowo niskich strat w tyrystorach.
Te konwertery są używane w kontroli prędkości silników frakcjonowych CC, a także w dużych silnikach używanych w odwrotnych dyskach ze zmienną prędkością dla wałków o wymiarach silnika tak ważnych jak kilka MW.
W niektórych typach konwerterów (pół-konwertera) dioda znana jako dioda wolnego koła jest podłączona na zaciskach silnika, aby umożliwić rozproszenie energii przechowywanej w indukcyjności silnika i zapewnienie ciągłości silnika, gdy tyrystory są blokowane. Oferuje również ochronę przed przejściowymi przepięciami.

Pojedynczy konwerter półfalowy:
Rysunek 11.14 pokazuje jednofazową konwerter półfazowy w celu osobno sterowania wzbudzonym silnikiem CC. Wymaga pojedynczego tyrystora i wolnego diody koła. W tym obwodzie prąd silnika jest zawsze nieciągły, co powoduje słabą wydajność silnika.

Ten typ konwertera jest używany tylko dla silników mniejszych niż 400 W. Nie zostanie tutaj szczegółowo opisany; Łatwo wynikają one z opisu form fali (napięcie i prąd) dla półkonwertera.

Półkonwerter dostarczający osobno podekscytowany silnik CC:
Jest to konwerter kwadrantu (ryc. 11.15a), który daje napięcie i prąd polarności na zaciskach CC. Dlatego nie przewiduje hamowania regeneracyjnego, to znaczy przepływ mocy kontroli silnika prądu stałego do mocy prądu przemiennego. Gdy regeneracja nie jest wymagana, ten konwerter jest wykorzystywany ze względu na gospodarkę.

Rysunek 11.15 (b) podaje obwody półresteru dostarczające podekscytowane sterowanie silnikiem CC osobno. Odporność na wzmocnienie RA i indukcyjność są reprezentowane szeregowo z emfem EMF indukującym przez ramkę, podczas gdy napięcie końcowe Inhessy.
Ma dwa tyrystory, dwa diody i wolną diodę kołową (podłączoną przez zaciski silnika). Zakłada się, że podczas stałego funkcjonowania prąd zbrojenia jest ciągły w całym zakresie roboczym.
Typowe trwałe fale fali mocy przedstawiono na rycinie 11.16. TH1 Thyristor jest rysowany pod kątem α i Th2 pod kątem π + α w porównaniu z napięciem zasilania ν, a proces powtarza się w sposób ciągły.

W zwykłych warunkach, jak rysowany jest Th1 (ωt = α), rura Th1 i D2 i silnik jest podłączony do zasilania, to znaczy νa = ν. Przy ωt = π, νA zwykle staje się ujemna jako biegunowość zmian napięcia wejściowego.
Oznacza to, że DFW, dioda swobodna, staje się stronnicza do przodu, a przepływ wzmocnienia, który przepływa przez TH1D2, jest przenoszony do DFW, co oznacza, że TH1 przełącza się (naturalnie).
Zaciski silnikowe są zwarte przez DFW dla wolnego okresu koła π <ωt <π + α, zapewniając ciągłość prądu zbrojenia w tym okresie, gdy silnik pozostaje odłączony od zasilania.
Przy ωt = π + α, TH2 jest rysowany, a jazda TH2D1, co oznacza, że DFW jest odwrócone, a zatem w otwartym obwodzie. Silnik jest ponownie podłączony do zasilania następującego okresu π + α <ωt <2π. Proces ten powtarza się w sposób ciągły.
Różne formy fali fali napięcia i fali prądowej wzbudzonej kontroli silnika CC oddzielnie odżywione przez półwążek są reprezentowane na rycinie 11.16. Chociaż napięcie między zaciskami silnikowymi (ryc.
11.16 (c)) zawiera harmoniczne poza stabilną wartością CC, słusznie jest tutaj, że silnik nie reaguje na te harmoniczne, a zatem działa przy stałej prędkości (n) i stałym indukowanym MES (EA). Gdy TH1 rysuje ωt = α, prąd silnika jest podany przez

Do punktu P zilustrowane na rysunku 11.16 (a); ν> ea, aby prąd silnika wzrastał. To samo dotyczy silnika EMF EA. W tym okresie, oprócz energii dostarczanej do obciążenia, energia jest również przechowywana w indukcyjności silnika (The).
Poza punktem P, ν
W okresie wolnego koła (π <ωt <π + α) dioda nadal jest stronnicza przez odwrócenie napięcia indukcyjnego. W tym okresie część energii przechowywanej w indukcyjności silnika jest zużywana w celu zasilania obciążenia mechanicznego.
W związku z tym prąd silnika, prędkość i MES zmniejszają się. Proces ten jest następnie powtarzany w następnym okresie (π + α <ωt <2π + α) przez Th2D1 i później przez DFW. Prąd wyciągnięty z mocy zilustrowanej na ryc.
11.16 (d) jest częścią prądu zbrojeniowego, który krąży w okresach (α, π), (π + α, 2π), … gdy silnik jest podłączony do zasilania. Używanie diody w wolnym kole nie jest konieczne.
Przy jego nieobecności przy ωt = π, D1 staje się stronniczy w taki sposób, zanim wolne koło nastąpi przez TH1D1, aż do narysowania Th2. Przy ωt = 2π koło wolne odbywa się przez TH2D2 i tak dalej.
Konieczne jest zaobserwowanie z ryc. 11.16 (d), że podstawowa prądu wyciągniętego z sektora jest spóźniona pod napięciem o kąt φ1 (<α).
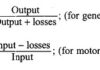
Niezadowolony prąd wzmacniający:
Prąd wzmacniający staje się nieciągł pod względem dużych wartości kąta strzelania, wysokiej prędkości i niskiego momentu momentu obrotowego. Wydajność silnika pogarsza się z nieciągłym prądem zbrojenia. Współczynnik szczytowy do średniej i RMS do średniego prądu zbrojenia wzrasta.
Dlatego pożądane jest obsługa silnika w trybie prądu stałego. Aby to osiągnąć, można zastosować uduszenie zewnętrznego obwodu zbrojenia, co zmniejsza szybkość spadku prądu podczas pracy swobodnego koła.
Napięcie i falowe fale fali mocy dla półkonwertera z prądem nieciągłym przedstawiono na rycinie 11.17. Silnik jest podłączony do zasilania przez Th1D2 dla okresu α <ωt <π. Oprócz π silnik jest zwarta przez diodę diody w wolnym kole.
Prąd wzmacniający rozpada się przy zerowym kąt β (kąt ekstynkcji) π + α, to znaczy przed narysowaniem tyrystora TH2, co czyni prąd nieciągłego wzmocnienia. Podczas α do π okres przewodzenia przez Th1d2 napięcie zacisku silnika jest takie samo jak napięcie wejściowe.
Podczas π do β napięcie zacisku silnika wynosi zero, ponieważ zaciski silnika są zwarte przez diodę wolnego koła. Od β do π + α silnik wybrzeża, a zatem jego napięcie końcowe jest takie samo, jak indukuje jego EMF.
Kompletny konwerter dostarczający podekscytowany silnik CC osobno:

Pełny konwerter jest dwukwadrantowym konwerterem (patrz ryc. 11.18 (a)), w którym można odwrócić polaryzację napięcia wyjściowego, ale prąd pozostaje jednokierunkowy z powodu jednokierunkowych tyrystorów.
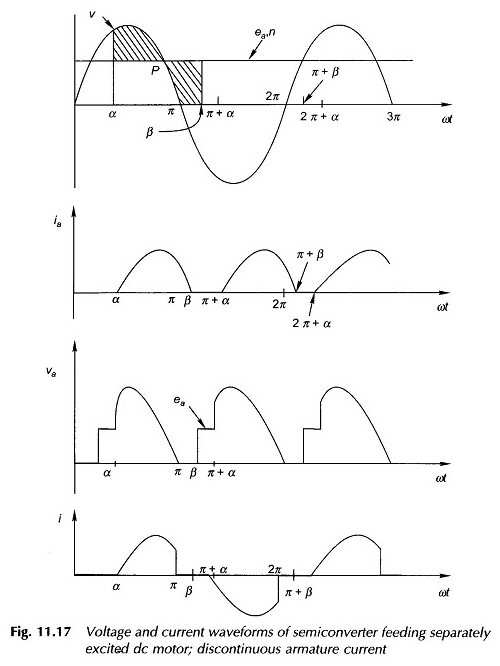
Kompletny konwerter wykorzystuje cztery tyrystory, ale nie jest wymagana żadna bezpłatna dioda koła. Pełny konwerter dostarczający osobno wzbudzony sterowanie silnikiem CC pokazano na rysunku 11.18. Napięcie i fale fali prądowej przedstawiono na ryc.
11.19 z hipotezą, że prąd wzmacniający IA jest prawie stały. Tyrystory TH1 TH3 Ołów dla przedziału α <ωt <π + α i łączą silnik do zasilania. Przy π + α tyristory Th2th4 są wyzwalane.
Natychmiast napięcie zasilania pojawia się w przeciwnym odchyleniu przez Th1 Th3 i gaśnie je. Jest to naturalne lub online. Prąd silnika jest przenoszony z Th1 TH3 do Th2th4.
Ponieważ nie ma okresu, w którym silnik jest odłączony od zasilacza, nie jest konieczne wolne koło. Podczas α do π energia przepływa z zasilania do silnika (ν i ja jesteśmy pozytywni, tak jak Going i IA).
Jednak podczas π do π + α część silnika silnika jest zwracana do zasilania (V i ja mam przeciwną polaryzację, podobnie jak Va et. Zauważ, że fundamentalna prąd pobrana z sektora opóźnia się za napięciem pod kątem φ1 = α.
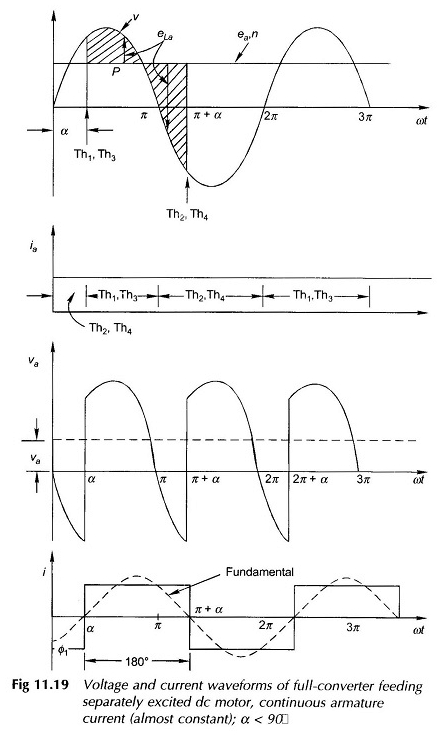
Napięcie i fale falowe dla α> 90 ° przedstawiono na rycinie 11.20. Średnie napięcie zacisku silnika jest teraz ujemne. Jeśli terminale silnikowe zostaną odwrócone, będzie działać jako zasilacz generatora do zasilania prądu przemiennego.
Jest to operacja odwrócenia konwertera i jest stosowana w hamowaniu regeneracyjnym silnika. Należy tutaj odnotować jeden punkt.
Podczas okresu przewodzenia Th1.3 lub Th2, gdy napięcie zasilania staje się ujemne, prąd wzmacniający zaczyna się zmniejszać, powodując przeciwieństwo polaryzacji indukcyjności, tak że przewodzące tyrystory nadal były stronnicze.
Napięcie i falowe falowe fali dla przypadku nieciągłego prądu zbrojenia można znaleźć, jak w przypadku półkonwertera. (Patrz ryc. 11.20).
Charakterystyka prędkości momentu obrotowego:
Zakładamy tutaj, że prąd wzmacniający jest ciągły. W przypadku pół-konwertera z bezpłatną akcją diody kołowej nietypowe równania obwodów to
Dla osobnego konwertera

Niech ν = √2 v sin ωt. Średnie napięcie zacisków silnika to: z pół-konwertera,

Z kompletnym konwerterem,

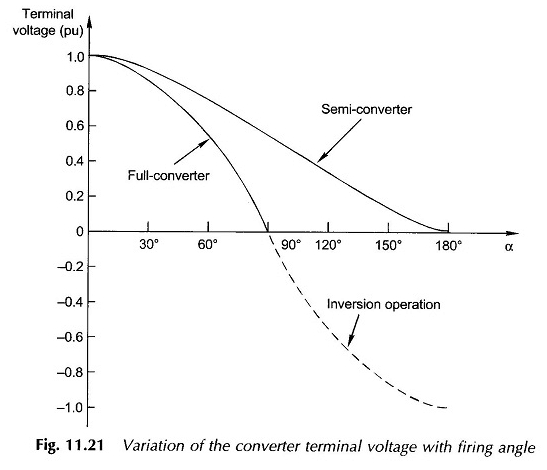
Rysunek 11.21 podaje zmianę napięcia zacisku silnika w funkcji kąta strzelania dla półkonwertera i całkowitego konwertera. W przypadku pełnego operacji inwersji konwertera występuje dla 90 ° <α <180 °.
Równania motoryczne dla średnich wartości to

I

Zastąpienie równania. (11.8) i VA równań (11,5) lub (11.6) w równaniu. (11.9), przesunięcia biegów są podane w następujący sposób:
Z półkonwerteriem,

Z kompletnym konwerterem

Pierwszy termin równań. (11.10) i (11.11) reprezentują prędkość teoretyczną nieładu, podczas gdy drugi termin reprezentuje spadek prędkości spowodowany rezystancją zbrojenia. Prędkość teoretyczna bez obciążenia może być zmieniana według kąta strzelania α.
W przypadku prądu nieciągłego średnie napięcie na zaciskach silnika zależy od kąta β (kąt ekstynkcji), który sam zależy od prędkości średniego silnika N, średniego prądu silnika IA i kąta strzelania α. Analityczne leczenie tego przypadku wykracza poza ramę tej książki.
Podwójny konwerter:
Podwójny konwerter może działać w czterech ćwiartkach, jak pokazano na rysunku 11.22 (a). Jego obwód jest reprezentowany na rysunku 11.22 (b). Są to dwa pełne konwertera, które konwertują na DC w obu kierunkach. Podwójny konwerter zapewnia praktycznie natychmiastową inwersję napięcia na zaciskach DC.

Kontrola silnika serii DC:
Do kontrolowania silnika serii DC używane są również pół-konwertera i kompletne konwertery. Całkowita indukcyjność obwodu jest wysoka ze względu na pole szeregowe, w konsekwencji, którego prąd zbrojenia jest głównie ciągły.
Równania motoryczne różnią się, ponieważ przepływ / biegun jest obecnie proporcjonalny do prądu zbrojenia. Leczenie jest w innym przypadku podobne do kontroli silnika z ciągłym prądem wzbudzonym i nie będzie tu kontynuowane z powodu braku przestrzeni.