Kontrola prędkości w zamkniętej pętli silnika CC:
Kontrola pętli zamkniętej silnika CC – przetworniki (prostowniki i helikoptery) są budowane przy użyciu urządzeń półprzewodnikowych, które mają bardzo niską pojemność termiczną. Dlatego ich przejściowe i stabilne prądy są takie same.
Silniki CC mogą transportować nominalny prąd od 2 do 3,5 razy podczas krótkoterminowych operacji przejściowych, takich jak początek, hamowanie i inwersja. Prąd jest wysoki, moment obrotowy jest wysoki, a odpowiedź przejściowa jest wyższa.
Dlatego, gdy wymagana jest szybka reakcja podczas operacji przejściowych, prąd silnika może mieć autoryzowaną maksymalną wartość. Ocena konwertera jest następnie wybierana równa maksymalnej autoryzowanej wartości prądu silnika.
Ze względu na znaczącą notację obecną koszt konwertera będzie teraz wyższy. Gdy szybka odpowiedź przejściowa nie jest wymagana, aktualna notatka konwertera jest wybierana tak, aby była równa bieżącemu wybrzeżem silnika w celu utrzymania kosztu niskiego konwertera.
Dysk otwartej pętli są wyposażone w bieżącą kontrolę limitu i w celu ochrony konwertera przed przeciążeniami prądowymi.
Kontrola prędkości zamkniętej pętli schematów silnika CC jest dostarczana z wewnętrzną pętlą kontrolną prądu w celu ograniczenia prądu w granicach bezpieczeństwa, a także przyspieszenie i zwalnianie czytelnika w maksymalnym autoryzowanym i momencie obrotowym podczas operacji przejściowych.

Należy jednak zauważyć, że opóźnienie w obecnym lub maksymalnym momencie obrotowym będzie możliwe, gdy zastosowany konwerter ma również pojemność operacji hamowania.
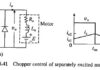
Można również zauważyć, że kontrolowany prostownik zostanie użyty, gdy zasilanie jest AC, a helikopter będzie używany, gdy zasilacz będzie prąd stał.
Podstawowe podejście do kontroli prędkości zamkniętej poniżej i powyżej prędkości jest wyjaśnione przez czytelnika na rysunku 5.47. Czytnik korzysta z wewnętrznej pętli sterowania prądem i pętli prędkości zewnętrznej.
Taki czytnik będzie działał przy stałym prądu pola i zmiennym napięciu przerw poniżej prędkości podstawowej oraz przy stałym napięciu wzmocnienia i zmiennym prądu pola powyżej prędkości podstawowej. Wzbrojenie i pole są zatem zasilane przez w pełni kontrolowane prostowniki.
Ponieważ wzmocnienie jest zasilane przez w pełni kontrolowany prostownik, przednie hamowanie nie jest możliwe; Czytelnik zwalnia tylko z powodu momentu ładowania. Z powodu kontroli prądu wewnętrznego z prądem ograniczonym przyspieszenie nastąpi poinformowane i do maksymalnego autora.
W półprzewodnikowym konwerterze Fed prowadzi do kontrolera PI (proporcjonalny i integralny), ponieważ filtruje hałas, który w innym przypadku może stać się problemem. Kontroler PI zapewnia również dobrą precyzję stanu równowagi.

Najpierw zbadajmy operację pod podstawową prędkością. W pętli kontrolnej pola EMF E jest porównywane z napięciem odniesienia E *, które jest wybierane jako od 0,85 do 0,95 nominalnego napięcia zbrojenia.
Najwyższa wartość jest stosowana do silników odporności na niską obwód zbrojenia. W przypadku prędkości poniżej podstawowej prędkości kontroler pola nasycenia ze względu na dużą wartość błędu EF. Kąt nagrody prostownika pola αF jest utrzymywany na zero, stosując napięcie nominalne na ziemi.
Gwarantuje to nominalny prąd pola do działania silnika poniżej podstawowej prędkości (ωMB). Gdy odniesienie prędkości jest zwiększone z ω * m1 do ω * m2 (ω * m2 <ωm1) z powodu błędu prędkości prądu, ograniczenie prądu nasyca się i definiuje bieżące odniesienie do maksymalnej wartości autoryzowanej.
Czytelnik przyspiesza dostępny prąd i maksymalny moment obrotowy. Gdy prędkość sięgnie w pobliżu ω * m2, ograniczenie prądu jest szczegółowe, a jazda jest regulowana z prędkością ωm2 i prąd, który zapewnia moment obrotowy silnika równy moment obciążenia.
Jeśli odniesienie prędkości zostanie zmniejszone do ω * M1, bieżące odniesienie jest zdefiniowane do zera, a czytnik jest zdenerwowany z powodu momentu obciążenia.
Gdy ωm staje się nieco niższy niż ω * m1, prąd silnika przepływa ponownie i ostatecznie prowadzi do reguł z prędkością ωm1 i prądu, dla którego moment obrotowy silnika równoważy moment obciążenia. W przypadku błędu prędkości ujemnej i * a jest zdefiniowane przy zero, ponieważ negatywne I * a jest bez użycia.
Jednak obciąży kontroler PI. Gdy prędkość odniesienia ponownie wzrasta, co powoduje prędkość do błędu dodatni, naładowany kontroler PI zajmuje dłużej, co sprawia, że reakcja przejściowej wolniej.
Teraz pozwól, aby operacja była badana powyżej podstawowej prędkości. Blisko podstawowej prędkości kontroler pola jest nasycony. Teraz, jeśli prędkość odniesienia jest zdefiniowana dla prędkości większej niż prędkość podstawowa, bieżące odniesienie jest zdefiniowane przy maksymalnej autoryzowanej wartości.
Kąt strzelania prostownika wzmacniający αA jest zmniejszony do początkowego wzrostu. Silnik przyspiesza, EF wzrasta, EF zmniejsza się, zmniejszając prąd pola.
Zatem prędkość silnika nadal rośnie, a prąd pola nadal zmniejsza się, aż prędkość silnika stanie się równa prędkości odniesienia. Ponieważ błąd prędkości będzie teraz niewielki, powróci do wartości zbliżonej do pierwotnej wartości.
Zatem kontrola prędkości powyżej podstawowej prędkości jest uzyskiwana przez kontrolę pola przy napięciu zbrojeniowym utrzymywanym w pobliżu wartości nominalnej. W obszarze kontroli pola (podstawowa prędkość powyżej) czytelnik reaguje bardzo powoli ze względu na wielką wartość stałej czasowej pola.