Silnik CC napędza miotły (trapezoidalne PMAC):
Przekrój poprzeczny silnika DC z 2 2 biegunami z 2 biegunami przedstawiono na rysunku 7.15. Ma trwałego kochającego wirnika z szerokim łukiem. Stojar ma trzy skoncentrowane uzwojenia fazowe, które są przenoszone o 120 °, a każde uzwojenie fazowe rozciąga się ponad 60 ° z każdej strony.
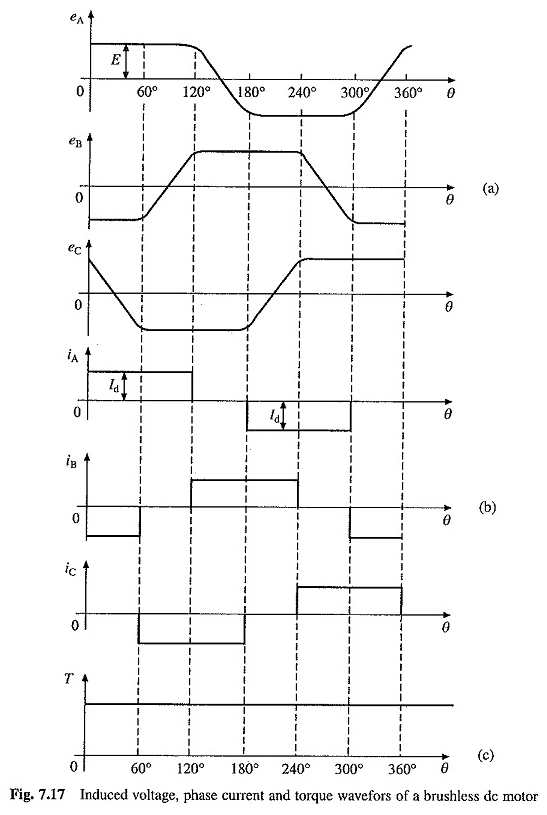
Napięcia indukowane w trzech fazach przedstawiono na ryc. 7.17 (a). Można teraz wyjaśnić powód uzyskiwania form fal trapezoidalnych. Kiedy odwrócisz kierunek w sensie przeciwhorarycznym, do 120 ° obrotu pozycji zilustrowanej na ryc.
7.15, wszystkie górne czynniki fazy połączą biegun południowy i wszystkie dolne czynniki fazy, aby połączyć biegun północny. W związku z tym napięcie indukowane w fazie A będzie takie samo podczas obrotu 120 ° (ryc. 7.17 (a).

Poza 120 ° niektórzy kierowcy na północnym biegunie górnego łącza i inne biegun południowy. To samo dzieje się z niższymi sterowcami. W konsekwencji napięcie indukowane w fazie ma liniowo liniowe w obrocie następujących 60 °. Resztę przebiegu fazy A i fal faz B i C można wyjaśnić w ten sam sposób.


Trapezoidalny silnik PMAC odżywiony w falowniku działającym w trybie samokontrolującym nazywa się silnikiem CC bez szczotek.

Motor DC bez mioteł do zastosowań w serwomeście:
Krótki sam silnik DC z użyciem falownika źródłowego napięcia (VSI) i trapezoidalnego silnika PMAC pokazano na rysunku 7.16 (a).
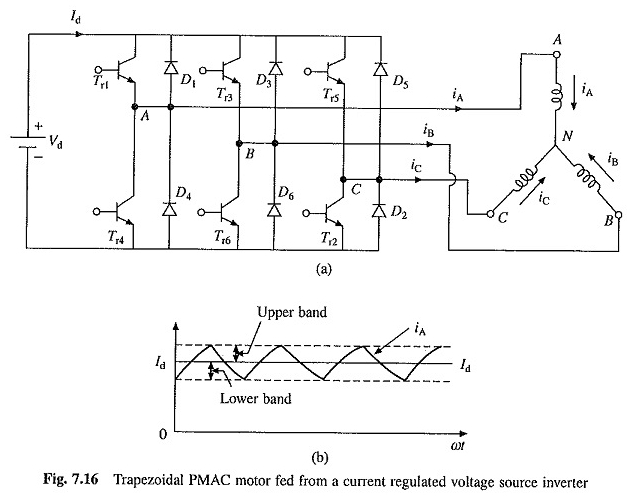
Uzwojenia stojana są połączone z gwiazdami. Będzie miał czujniki położenia wirnika, które nie zostały zilustrowane na rysunku. Fale falowe fazowe dla trapezoidalnego silnika PMAC przedstawiono na rysunku 7.17 (a). Że uzwojenia stojana są zasilane impulsami prądowymi reprezentowanymi na rysunku 7.17 (b).
Impulsy prądowe to 120 ° i znajdują się w obszarze, w którym napięcie indukowane jest stałe i maksymalne. Ponadto biegunowość impulsów prądowych jest taka sama jak w przypadku wywołanego napięcia. Ponieważ przepływ powietrza jest stały, napięcie indukowane jest proporcjonalne do prędkości wirnika.
![]()
W każdym przedziale 60 ° na rycinie 7.17 prąd między fazą i wynika z innej fazy, zatem zasilanie silnika w każdym z tych przedziałów ![]()
Moment obrotowy opracowany przez silnik

Kształt fali pary podano na rysunku 7.17 (c). Według równania. (7.31) Para jest proporcjonalna do bieżącego identyfikatora. Możesz wyświetlić, że identyfikator prądu CC krąży w linku CC. Operację hamowania regeneracyjnego uzyskuje się przez odwrócenie prądów fazowych.
Spowoduje to również odwrócenie bieżącego identyfikatora źródła. Teraz moc przechodzi z maszyny do falownika i falownika w źródle DC. Po odwróceniu prędkości polaryczność indukowanych napięć jest odwrócona. Z obecną polaryzacją zilustrowaną na ryc.
7.17, czytelnik zapewnia regeneracyjną operację hamowania, a po odwróceniu bieżącego kierunku, uzyskuje się działanie samochodu. Formy fali prądowej pokazane na ryc. 7.17 (b) są wytwarzane w następujący sposób.
W okresie od 0∘ do 60∘, IA = ID i IB = –id. Obecna sztuczna inteligencja między fazą A i Share przez fazę B. Gdy tranzystory TR1 i TR6 są, terminale A i B są powiązane z dodatnimi i ujemnymi zaciskami źródłowego DC.
Prąd będzie krążył ścieżką złożoną z VD, Tr1, fazy A, fazy B i Tr6, a prąd wskaźnik zmiany IA będzie dodatni. Gdy TR1 i TR6 są dezaktywowane, prąd ten będzie krążył ścieżką złożoną z fazy A, fazy B, diody D3, VD i diody D4.
Ponieważ prąd musi krążyć w stosunku do napięcia VD, szybkość zmienności IA będzie ujemna. Zatem, aktywując i gasiąc na przemian fazę Tr1 i Tr6, prąd A można wykonać w celu przestrzegania bieżącego ID odniesienia w pasma histerezy, jak pokazano na rycinie 7.16 (b). Zmniejszając pasmo, można wytwarzać prawie prąd CC o pożądanej wartości.
Działanie innych przedziałów 60 ° można wyjaśnić w ten sam sposób. Aby prawidłowo umieścić impulsy mocy w porównaniu z indukowanymi napięciami lub identyfikacją tych sześćdziesięciu przedziałów, sygnały są generowane przez czujniki położenia wirnika.
W sześciu pozycjach kątowych wirnika należy wykryć przez cykl indukowanego napięcia. Czujniki efektu hali mogą wykryć wielkość i kierunek pola magnetycznego. Dlatego trzy efekty pokoju mogą wykryć sześć pozycji wirnika.
Czujniki są montowane w przedziale elektrycznym 60 ° i odpowiednio wyrównane z uzwojeniem stojana. Dostępne są również czujniki optyczne. Czujniki zastosowane z trapezoidalnym silnikiem PMAC są tańsze w porównaniu do czujników wymaganych z sinusoidalnym silnikiem PMAC.
Ponieważ silnik trapezoidalny jest również tańszy, czytelnik ma znacznie niższe koszty. Chociaż reakcja dynamiczna jest porównywalna, fale obrotowe są znacznie wyższe w tym czytelniku.
Rozpuszczenie momentu obrotowego jest spowodowane indukowanym napięciem, że napięcie nie jest dokładnie trapezoidalne i niezdolność falowników do wytwarzania prostokątnych fal falowych prądu.
Trapezoidalny gracz PMAC jest szeroko stosowany w szkoleniu serwoterskim, z wyjątkiem dysków o wysokiej wydajności, w których preferowany jest sinusoidalny gracz silnika PMAC.
Istnieje wiele podobieństw między trapezoidalnym silnikiem PMAC zasilanym falownikiem i silnikiem prądu stałego. Jako silnik prądu ciągłego napięcie indukowane jest proporcjonalne do prędkości [równ. (7.30)], moment obrotowy jest proporcjonalny do prądu zbrojenia [równ.
(7.31)], a pola stojana i wirnika pozostają stacjonarne w porównaniu ze sobą. Nie ma jednak powiązanych pędzli i wad, więc trapezoidalny silnik PMAC zasilany falownikiem jest powszechnie znany jako silnik CC miotły.
Silnik ten jest również zaprojektowany jako elektronicznie przełączany silnik prądu stałego, ponieważ falownik wypełnia tę samą funkcję tutaj, co szczotki i przełącznik w silniku prądu stałego, to znaczy
Aby przesunąć prądy między sterownikami szkieletowymi, aby utrzymać stojan i stacjonarne pola wirnika (i kwadratryczne) w porównaniu do siebie.
Silnik CC napędza bez niskich miotłów:
Jednym z ważnych punktów dotyczących czytników silników CC bez CC jest wyłącznie integracja konwertera / falownika z silnikiem, czytnik jest znacznie uproszczony, co powoduje prostszą kontrolę i znaczne zmniejszenie kosztu.
Podczas gdy w aplikacjach większościowych stosuje się trzy -fazowe maszyny, używane są również maszyny jednofazowe i cztery fazy. Podobnie stosuje się szeroką gamę konwerterów / falowników.
Silniki są zasilane impulsami prądowymi, a także impulsami napięcia o limicie prądu tylko w celu zapewnienia, że prąd nie przekracza wymiarów konwertera i silnika. Dwóch z tych czytelników opisano poniżej.

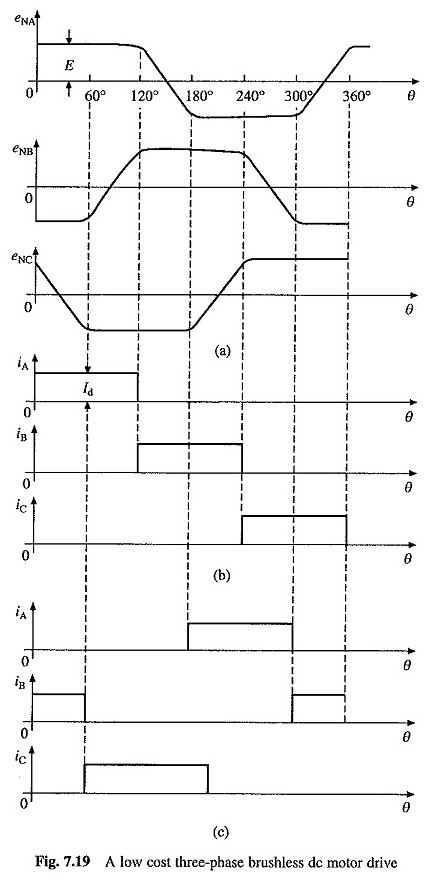
Niski koszt z użyciem trójstronnego silnika PMAC ilustruje się na rycinie 7.18. Używa tylko trzech tranzystorów i trzech przetworników diodowych, które mogą zapewnić tylko dodatnie prądy lub napięcia z trzema fazami motorycznymi.
Indukowane napięcia i prąd przewidziany do operacji motoryzacyjnych i hamowania przedstawiono na rysunku 7.19. Gdy silnik dostarczany jest pulsowanie mocy dodatniej w temperaturze 120 °, jak wskazano na rycinie 7.19 (b), obsługę jazdy uzyskuje się w kierunku przeciwhorarnym.
Gdy impulsy te są przesunięte o 180 °, jak pokazano na rysunku 7.19 (c), uzyskuje się operację hamowania. Operacje motoryzacyjne i hamowania dla obrotu w kierunku czasowym są uzyskiwane przez synchronizację impulsów, jak wskazano odpowiednio na rysunku 7.19 (c) i (b). Każda faza jest dostarczana głównie przez helikopter.
Prąd fazowy NA jest kontrolowany przez Tr1 i D1. Gdy TR1 znajduje się na źródle, VD jest połączone przez uzwojenie Na, a szybkość zmienności AI jest dodatnia. Gdy TR1 jest dezaktywowany, obecne koła IA poprzez diodę D1, a szybkość zmienności AI są ujemne.
Zatem, w okresie od 0 ° do 120 °, Tr1 można na przemian aktywować i dezaktywować, aby prąd IA jest wytwarzany do prostokątnego prądu odniesienia I * A w pasie histerezy.
W porównaniu z czytnikiem na ryc. 7.16 moment obrotowy wytworzony przez tego czytnika dla danej wartości ID będzie połowa, co daje wolniejszą reakcję dynamiczną. Czytelnik ma również wyższy błąd momentu obrotowego.
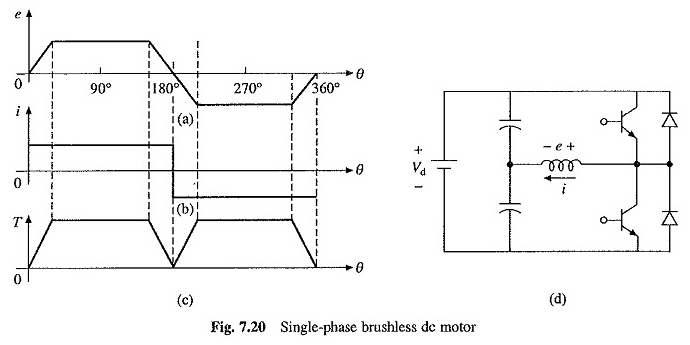
Przeanalizujmy również ciągłe trening ruchowy w jednoosobowym bieżącym fazie. Opuść silnik ma szeroki biegun jest wskazany na ryc. 7.15, a pojedyncze stężone uzwojenie fazowe z rozprzestrzenianiem się 60 ° z każdej strony.
Niech θ mierzy się od momentu, gdy oś fazy pokrywa się z osą słupka wirnika, wówczas napięcie indukowane w uzwojeniu fazowym będzie miało kształt fali, jak pokazano na rysunku 7.20. Lub silnik, który ma być dostarczany z jednofazowego konwertera półp. Ilustrowanego na ryc.
7.20 (d) z postacią prostokątnej fali prądu pokazanego na rysunku 7.20 (6). Następnie moment obrotowy wytwarzany przez silnik będzie miał kształt fali ilustrowany na rysunku 7.20 (c).
Chociaż moment obrotowy ma dużą falę, gdy działa z dużą prędkością, fale obrotowe zostaną przefiltrowane przez bezwładność układu obciążenia silnika, co daje jednolitą prędkość.
Ważne cechy i zastosowania:
Z powodu braku szczotek i przełączników szkolenie silnika bez silnika ma wiele zalet w porównaniu z konwencjonalnymi silnikami CC.
Wymagają praktycznie braku konserwacji, mają długą żywotność, wysoką niezawodność, niską bezwładność i tarcia oraz zakłócenia i hałas o niskiej częstotliwości radiowej.
Z powodu niskiej bezwładności i tarcia mają one szybsze przyspieszenie i mogą być wykonywane przy znacznie wyższych prędkościach – do 100 000 obr / min i są bardziej powszechne. Ponieważ uzwojenia wzmacniające są na stojanie, chłodzenie jest znacznie lepsze, to znaczy, że można uzyskać określone wyższe wyjścia.
Silniki te mają wysoką wydajność, przekraczając 75%, podczas gdy silniki polowe o niskiej mocy mają znacznie niższą wydajność. Wady w porównaniu z konwencjonalnymi silnikami CC to wysoki koszt i niski moment początkowy. Rozmiar silnika CC Balais jest prawie taki sam jak konwencjonalny silnik CC.
Czytniki silników CC CC Find Founding Applications z kolei czytniki tabeli w rejestrowaniu czytników, czytnika zespołu dla rejestratorów wideo, kijowatów w dyskach twardych dla komputerów i dyskach o niskiej i niskiej mocy w peryferyjnych komputerach, instrumentach i systemach sterowania.
Mają także zastosowania w dziedzinie lotniczej, na przykład silników żyroskopowych i biomedycznych kriogenicznych chłodnic i sztucznych pomp serca. Służą również do napędzania wentylatorów chłodzących do obwodów elektronicznych i rozpraszaczy ciepła.