Rodzaje silników DC:
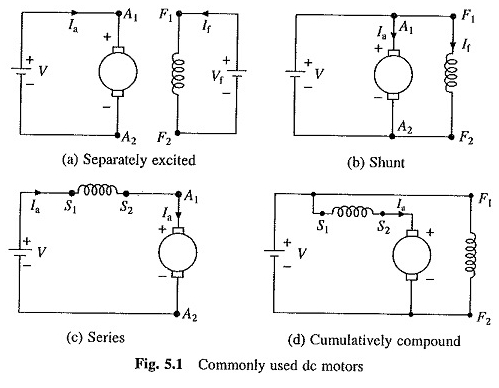
Powszechnie używane typy silników prądowych są reprezentowane na rysunku 5.1. W podekscytowanym silniku osobno napięcia terenowe i wzmacniające mogą być kontrolowane niezależnie od siebie. W silniku bocznym pole i wzmocnienie są podłączone do wspólnego źródła.
Silniki dc
W przypadku serii serii prąd pola jest taki sam jak prąd zbrojenia, a zatem przepływ pola zależy od prądu zbrojenia.
W skumulowanym silniku złożonym siła magneto-ruchowa pola szeregowego jest funkcją prądu zbrojeniowego i znajduje się w tym samym kierunku co MMF pola bocznikowego.
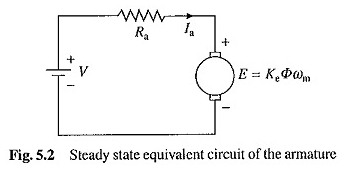
Obwód równoważny stanowi równowagi ramki maszyny CC pokazano na rysunku 5.2. Rezystancja RA jest odpornością obwodu zbrojeniowego.
W przypadku silników oddzielnie wzbudzonych i bocznikowych jest on równy odporności wzmocnienia wzmocnienia i dla silników w szeregowych i związkach, jest to suma odporności uzwojenia ramki i pola. Podstawowe równania mające zastosowanie do wszystkich rodzajów silnika CC to

Lub
Φ – to przepływ przez słup, Webers;
IA – prąd wzmacniający, a;
V – napięcie r -rip;
RA – Opór nietypowego obwodu, ome;
Ωm – prędkość zbrojenia, rad / sucha;
T – moment obrotowy opracowany przez silnik, NM; I
KE – stała silnika.
Równania. (5.1) do (5.3) 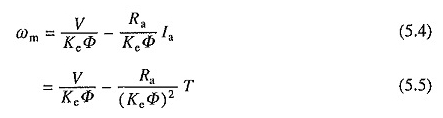
Zamknięcia i osobno podekscytowane:
W przypadku oddzielnie silników bocznikowych i wzbudzonych, ze stałym prądem pola, przepływ można przypuszczać stały. Odejść
![]()
Następnie z równań. (5.1), (5.3) i (5.4) do (5.6)

Charakterystyka prędkości i kruszek korkowych podekscytowanego silnika osobno dla napięcia końcowego i pełnego pola przedstawiono na rysunku 5.3. Krzywa prędkości Torca jest linią prostą.
Prędkość ładowania bez obciążenia ωM0 jest określana przez pola wzmocnienia i wzbudzenia pola. Prędkość maleje wraz ze wzrostem momentu obrotowego, a regulacja prędkości zależy od oporu obwodu zbrojeniowego (równ. (5.10)). Zwykła spadek prędkości pełnego obciążenia obciążenia, w przypadku silnika o średnim rozdzielczości,

wynosi około 5%. Podekscytowane silniki osobno są używane w aplikacjach wymagających dobrej prędkości i regulowanej prędkości.
SILNIK SERII:
W silnikach szeregowych przepływ zależy od prądu zbrojenia. W obszarze charakterystycznym nienasyconym magnetyzacji φ może być proporcjonalne do AI. Więc,
![]()
Zastąpienie równań. (5.3), (5.4) i (5.5) podaje
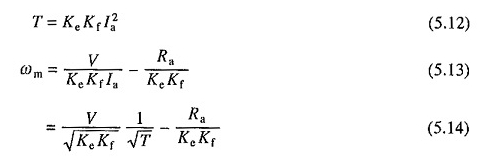
Tam, gdzie odporność na obwód wzmacniający RA jest teraz sumą uzwojenia rezystorów zbrojenia i pola. Charakterystyka Torca i korki silnika szeregowego w nominalnym i pełnym napięciu pola przedstawiono na rysunku 5.3.
Silniki serii są odpowiednie do zastosowań wymagających wysokiego momentu rozruchowego i ciężkiego przeciążenia momentem obrotowym.
Biorąc pod uwagę, że moment obrotowy jest proporcjonalny do prądu zbrojeniowego do kwadratu, dla takiego samego wzrostu momentu obrotowego, wzrost prądu silnika jest mniejszy w porównaniu z podekscytowanym silnikiem osobno, gdy moment obrotowy jest proporcjonalny do zbrojenia.
Zatem podczas ciężkiego przeciążenia momentem obrotowym i uruchomieniem -przeciążenie zasilania na źródle i termiczne przeciążenie silnika są ograniczone do rozsądnych wartości. Według równania. (5.14), ponieważ prędkość zmienia się odwrotnie podobnie jak pierwiastek kwadratowy momentu, maszyna działa z dużą prędkością przy lekkim obciążeniu.
Zasadniczo oporność mechaniczna rodzaju silnika prądu ciągłego pozwala mu działać do około dwukrotności prędkości nominalnej.
W związku z tym silnik serii nie powinien być używany w dyskach, w których istnieje możliwość porzucenia momentu obciążenia, o ile prędkość może przekroczyć wartość nominalną dwukrotnie.
Silnik złożony:
Charakterystyka prędkości TORCA i krzyżowa kruktującego silnika złożonego są również przedstawione na rycinie 5.3. Prędkość bez obciążenia zależy od wytrzymałości pola bocznikowego i nachylenia charakterystyki siły pola serii.
Łączne silniki złożone są stosowane w zastosowaniach, w których wymagana jest charakterystyka opadania podobna do serii serii, a jednocześnie prędkość obciążenia musi być ograniczona do bezpiecznego zakładu; Typowymi przykładami są windy i zwycięzcy.
Jest również stosowany w przerywanych aplikacjach obciążenia, w których obciążenie różni się od prawie braku obciążenia do bardzo dużych obciążeń. W tych zastosowaniach kierownicę można zamontować na wale silnikowym w celu wyrównania obciążenia.
Oprócz obciążenia wyrównania zasilania pozwala na użycie mniejszego silnika. Maszyna prasowa jest typowym przykładem tego typu aplikacji.
Charakterystyka z ryc. 5.3, które są uzyskiwane na napięciu nominalnym i w pełnym polu, są znane jako naturalne cechy prędkości szczeliny. Nominalna prędkość (lub pełne obciążenie) jest znana jako prędkość podstawowa.
Universal Silnik:
Silnik uniwersalny może działać zarówno na zasilaniu DC, jak i AC. Jest to zasadniczo silnik serii DC, z pewnymi różnicami konstrukcyjnymi; które są głównie wprowadzane w celu uzyskania zadowalającej wydajności na AC. W szeregowym silniku moment obrotowy zależy od produktu prądu ramowego i przepływu pola.
Inwersja odwrotnego napięcia zaciskowego zarówno wzmocnienia, jak i przepływu pola. Dlatego para pozostała w tym samym kierunku. Dlatego po odżywianiu źródła CA silnik serii wytwarza jednokierunkowy moment obrotowy.
Chociaż moment obrotowy zmienia się z częstotliwością 100 Hz między zero a jego wartością grzebienia, jego fluktuacje są wygładzone przez bezwładność silnika, a silnik działa z równomierną prędkością.
Prosty silnik serii DC nie działa dobrze na AC. Histereza i straty prądu Foucault, które występują w biegunach polowych i jokach, zmniejszają wydajność silnika i zwiększają obciążenie termiczne.
Przemienny przepływ wytwarza duże prądy indukowane w cewkach, które są krótkie przez szczotki podczas przełączania. Powoduje to nadmierną iskrę do przełącznika. Współczynnik mocy silnika jest bardzo mierny z powodu dużej indukcyjności pola i wzmocnienia.
Silnik uniwersalny jest specjalnie zbudowany w celu rozwiązania tych ograniczeń. Oprócz zbrojenia słupki polowe i widżerka są również zwinięte w celu zmniejszenia strat prądowych Foucault. Wysoka rozwarstwienie dla stali krzemowej stosuje się w celu zmniejszenia utraty histerezy.
Uzwojenie kompensacyjne jest stosowane szeregowo ze wzmocnieniem w celu zmniejszenia indukcyjności wzmocnienia. Indukcja pola jest obniżana za pomocą mniejszych wież i płytkich kawałków bieguna. Pomimo tych zmian, gdy jest napędzany przez prąd przemienny, przełączanie jest gorsze niż w przypadku karmienia DC.
Dlatego ich oceny energii rzadko są większe niż 1 kW. Nie jest podnoszona prędkość obciążenia, ale ogólnie nie jest wystarczająco wysoka, aby uszkodzić silnik.
Większość uniwersalnych silników składa się do użytku przy prędkościach większych niż 3000 obr / min. Jest to maksymalna prędkość silnika indukcyjnego, gdy jest dostarczany z zasilania 50 Hz. Poniżej tej prędkości preferowany jest silnik indukcyjny.
Wiele uniwersalnych silników działa z prędkością do 12 000 obr./min i może wzrosnąć do 20 000 obr./min. Ze względu na duże prędkości pracy silnik uniwersalny jest znacznie mniejszy niż w przypadku indukcji lub silnika CC o niskiej prędkości identycznej notacji.
Ze względu na szczotki i przełącznik wymaga częstej konserwacji i ma stosunkowo krótki czas pracy.
Do niedawna silnik Universal był najtańszym silnikiem zdolnym do biegania z dużą prędkością i posiadania stosunkowo bardzo niskiej wagi i wielkości.
Ciągłe prądu typów bez motoryzacji lub silnik indukcyjny jednofazowy zasilany przez falownik o zmiennej częstotliwości może stać się jego konkurentem w najbliższej przyszłości.
Niektóre uniwersalne zastosowania silników to wentylatory, ćwiczenia elektryczne, urządzenia gospodarstwa domowego itp.
Stałe silniki kochające:
W ciągłych silnikach prądu magnesu stały, emocje na ziemi uzyskuje się przez prawidłowe wznoszące się magnesy na stojanie. Zastosowane są magnesy ferrytów lub ziem rzadkich (samarium kobaltu). Ferryty są powszechnie stosowane z powodu niższych kosztów, ale maszyna staje się nieporęczna z powodu najniższej rozstrzenania.
Ziemia rzadki ze względu na ich wysoką rozstrzenność pozwalają na duże zmniejszenie masy i wielkości, ale są bardzo drogie. Stałe kochające silniki są używane głównie w zakresie mocy ułamkowych, ale są dostępne do 5 kW.
Zastosowanie stałych magnesów do podniecenia eliminuje utratę miedzi na polu i potrzebę ofert w terenie. W porównaniu z silnikami ran w terenie są one bardziej skuteczne, niezawodne, solidne i zwarte.
Przepływ pola pozostaje stały dla wszystkich obciążeń, co daje bardziej liniową charakterystykę momentu obrotowego prędkości. W podekscytowanym silniku osobno awaria jedzenia na ziemi może prowadzić do stanu ucieczki. Nie zdarza się to w stałych kochających silnikach.
Ponieważ przepływ jest stały w tych silnikach, prędkości nie można kontrolować powyżej podstawowej prędkości. Silniki te mają zastosowania w pojazdach elektrycznych, takich jak motorower, wózki podnoszące, wózki inwalidzkie itp.
DC Servo Motors:
Nie ma wyraźnej linii udostępniania między serwo i konwencjonalną obrażenia w terenie i trwałym kochającym silnikom DC.
Perromotory mają być używane w systemach prędkości pętli zamkniętej i systemach kontroli pozycji, w których wymagania dotyczące wydajności są takie, że nie można ich uzyskać przez normalny silnik prądu stałego. Normalny typ silnika CC został zaprojektowany w celu uzyskania dobrej wydajności pełnego obciążenia przy minimalnym koszcie.
Nie zapewnia dobrej reakcji dynamicznej i stałego wyjaśnienia, gdy jest używany w zamkniętej pętli. Z drugiej strony serwomotor został zaprojektowany w celu osiągnięcia dobrej dynamicznej wydajności i stałej precyzji reżimu.
Został zaprojektowany do uzyskania takiej samej wydajności w obu kierunkach obrotu, wysokiego stosunku momentu obrotowego / bezwładności, niskiego tarcia i momentu obrotowego bez gładkiej falowania. W rodzaju silnika prądu ciągłego bezwładność ramy jest proporcjonalna do długości i średnicy na kwadratie.
U niektórych serwomotorów bezwładność jest zmniejszona poprzez zmniejszenie średnicy i zwiększenie długości dla tej samej nuty. W cechach o niskiej mocy, w której kontrola prądu nie jest włączona, prąd podczas pracy przejściowej może być nawet wyższy niż dziesięć razy więcej niż prąd nominalny.
Przełącznik został zaprojektowany w celu uzyskania przełączania bez iskry, nawet w tak ważnych prądach, co nie będzie możliwe w wspólnym obecnym silniku. Z powodu tych wymagających wymagań serwomotory są znacznie droższe niż obecne silniki CC.
Ich notatki mogą być kilka watów (w serwozach instrumentowych) w Megha Watts (stalowe rolki). Małe serwomotory są na ogół typem magnesu stałego.
Ruchome silniki cewek:
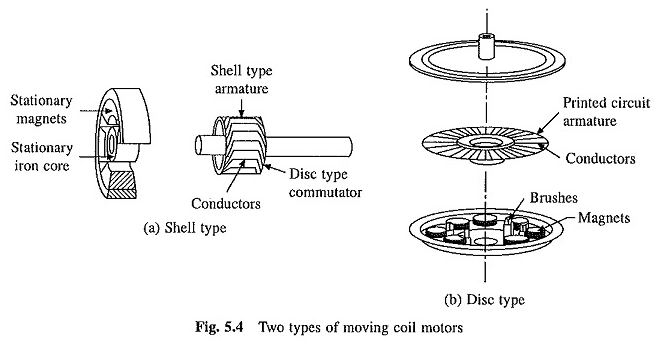
Niektóre aplikacje wymagają znacznie wyższego przyspieszenia niż można to zrobić w konwencjonalnym serwomotorze CC. Wzmocnienia ciągłych prądowych silników cewek mobilnych mają specjalne konstrukcje, które umożliwiają znaczne zmniejszenie bezwładności różanej i indukcyjnej, umożliwiając bardzo wysokie przyspieszenia. Dwa rodzaje ruchomych silników cewek to rodzaj powłoki i dysku.
Rodzaj powłoki:
Aby zmaksymalizować przyspieszenie, należy zminimalizować bezwładność.
W konwencjonalnym silniku CC wzmocnienie składa się z uzwojenia znajdującego się w szczelinach dostarczanych na cyklinowniku materiału magnetycznego, który jest głównie planowany w celu zapewnienia niskiej ścieżki niechęci dla pola stojana i działa z uzwojeniem wzmocnienia. Dlatego wzmocnienie ma wysoką bezwładność.
W mobilnym silniku cewki typu shell (ryc. 5.4 (a)) wirnik składa się tylko z uzwojenia wzmacniającego. Dlatego ma bardzo niską bezwładność. Niska ścieżka niechęci dla pola stojana jest dostarczana przez cylinder stacjonarnego materiału magnetycznego.
Uzwojenie zbrojeniowe składa się z przewodów zmontowanych w celu utworzenia cienkiego cylindra ściennego. Przełącznik może mieć cylindryczną konstrukcję, jak w konwencjonalnych silnikach CC lub budowy typów dysku.
Małe silniki (o średnicach około 1 cm), zwane mikromotorami, mają wał wzmacniający złożony z po prostu lakierowanych przewodów ułożonych w formie cylindrycznej i przełącznika typu dysku. Silniki te są szeroko stosowane w kamerach, odtwarzaczach kart, systemach wideo itp.
W większych silnikach wzmocnienie wzmocnienia jest wykonywane przez wiązanie przewodów razem za pomocą żywic polimerowych i włókna szklanego w celu zapewnienia odpowiedniego odporności mechanicznej.
Rodzaj dysku lub naleśników:
Szczegóły konstrukcji pokazano na rysunku 5.4 (b). Wzbrojenie jest wykonane w postaci dysku lub naleśników, a sterowniki ramy przypominają promienie na kole.
Roller wzmacniający jest uformowany, czy buforuje sterowniki z miedzianej arkusza, spawanie ich razem i umieszczając na lekkim dysku. Segmenty kierowcy są następnie przymocowane do przełącznika na środek dysku.
Zauważ, że kierunek przepływu jest osiowy i że prąd zbrojenia jest promieniowy. Jest to po prostu przeciwne silnikom typu powłoki (lub konwencjonalnej), w których prąd jest osiowy, a przepływ jest promocyjny. Zasada działania jest taka sama jak w przypadku konwencjonalnego silnika prądu stałego.
Silniki cewek mobilnych dysk są bardziej solidne i dostępne do kilku kilowatów. Znajdują aplikacje, w których przestrzeń osiowa znajduje się w bonusie, takiej jak maszynowe narzędzia, dyski itp.
Przesunięte silniki cewek można dostarczyć dużą liczbę kierowców (kilkaset). Dlatego para pozostaje prawie stała w miarę obrotu wirnika. To pozwala im wytwarzać bardzo płynny obrót z niską prędkością.
Brak żelaza wzmacniającego silnika typu dysku eliminuje powiązane straty jądra, co czyni go bardziej skutecznym niż konwencjonalne silniki CC. Jak już wskazano, niska bezwładność i indukcyjność o niskiej zawartości władzy nadają ruchomym silnikom cewek doskonałą reakcję dynamiczną.
Silniki parowe:
Silniki CC zaprojektowane do działania przez długie okresy w stanie w standstill lub przy niskiej prędkości nazywane są silnikami momentu obrotowego. Normalny typ silnika CC został zaprojektowany w celu optymalizacji wydajności z pełną prędkością.
W małych notatkach zablokowany lub niski prąd prędkości w normalnych silnikach CC może wynosić 5 do 10 razy więcej prądu nominalnego. Jeśli silniki te będą mogły działać przy niskiej prędkości (lub zatrzymane), uzwojenie ramy zostanie spalone przez przegrzanie, a przełącznik zostanie uszkodzony z powodu ciężkości.
W przypadku silników momentu obrotowego, ze względu na specjalny projekt, prąd zablokowany i niskiej prądu pozostaje poniżej bezpiecznego zakładu. Niektóre silniki momentu obrotowego są zaprojektowane do działania z niską prędkością przez przerywanie.
Zastosowania silników momentu obrotowego można podzielić na trzy kategorie:
- Gdzie silnik musi działać w stanie. Tutaj celem silnika jest opracowanie napięcia lub ciśnienia wymaganego na materiale, podobnym do sprężyny. Narzędzia maszynowe, SPLIO jest częścią tej kategorii.
- W drugiej kategorii silnik momentu obrotowego jest konieczny do poruszania się tylko w kilku rewolucjach lub stopnie rewolucji. Otwarcie zaworów, przełączników i urządzeń dokręcających to kilka przykładów.
- Ta kategoria aplikacji implikuje ciągły ruch silnika z niską prędkością, na przykład czytnik cewki.