Kontrola w pełni kontrolowanego prostownika pojedynczego fazy silnika CC:
Kontrola w pełni kontrolowanego prostownika pojedynczego fazy silnika CC pokazano na rysunku 5.26 (a). Silnik jest wskazywany przez jego równoważny obwód. Żywność polowa nie jest wyświetlana. Gdy wymagana jest kontrola pola, pole jest zasilane z kontrolowanego prostownika, jeśli nie z niekontrolowanego prostownika. Napięcie wejściowe jest zdefiniowane przez

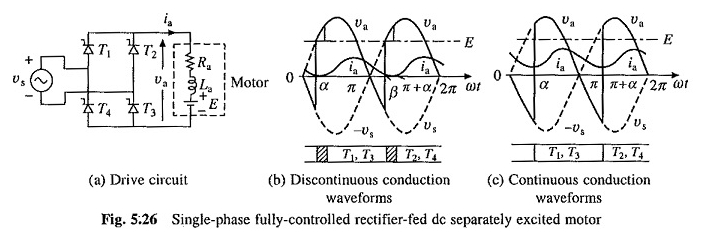

W cyklu napięcia źródłowego tyrystory T1 i T3 otrzymują sygnały drzwi od α do π, a tyrystory T2 i T4 odbierają sygnały drzwi (π + α) do 2π. Gdy prąd zbrojenia nie przepływa w sposób ciągły, silnik działa w nieciągłym przewodzeniu.
Gdy prąd krąży w sposób ciągły, przewodnictwo byłoby ciągłe. Rozważany czytelnik działa głównie w nieciągłym przewodzeniu. Nieciągłe przewodnictwo ma kilka trybów pracy.

Przybliżona, ale prosta metoda analizy jest uzyskiwana, gdy wzięto pod uwagę tylko dominujący tryb nieciągłego przewodnictwa.

Napięcie zacisku silnika i fale fal prądowych dla trybów nieciągłego przewodzenia i dominujące ciągłe przewodnictwo jest reprezentowane na ryc. 5.26 (b) i (c).
W nieciągłym trybie przewodzenia kontrolowanego prostownika w pełni kontrolowanej pojedynczej fazy silnika CC prąd zaczyna przepływać z implementacją tyrystorów T1 i T3 przy ωt = α. Silnik jest podłączony do źródła, a jego napięcie zaciskowe jest równe vs.
Prąd, który przepływa w stosunku do dwóch, E i napięcia źródłowego po ωt = π, spada z zera do β. Z powodu braku dezaktywacji obecnego T1 i T3. Napięcie zacisku silnika jest teraz równe jego indukowanym napięciu E. Gdy tyrystory T2 i T4 są ciągnięte do (π + α), rozpocznie się następujący cykl terminalu silnika.
W trybie ciągłego przewodzenia kontroli w pełni kontrolowanego prostownika pojedynczego fazowego silnika prądu ciągłego prąd dodatni krąży przez silnik, a T2 i T4 są w przewodnictwie tuż przed α. Zastosowanie impulsów siatki jest aktywowane na stronniczych tyrystorach z przodu T1 i T3 do α.
Przewodnictwo odwrotnych uprzedzeń T1 i T3 T2 i T4 dezaktywuje je. Cykl VA jest wykończony, gdy T2 i T4 są aktywowane przy (π + α), powodując dezaktywację T1 i T3.
Ponieważ prąd wzmacniający nie jest doskonałym DC, moment obrotowy silnika zmienia się. Ponieważ moment obrotowy zmienia się z częstotliwością 100 Hz, bezwładność silnika jest w stanie filtrować fluktuacje, co daje prawie stałą prędkość i falowanie E.
Niezadowolone przewodnictwo:
W całkowicie kontrolowanej kontroli prostownika pojedynczego w fazie napięcia zacisku sterowania silnikiem VA, czytnik działa w dwóch odstępach (ryc. 5.26 (b)):
- Interwał serwisowy (α ≤ ωT ≤ β), gdy silnik jest podłączony do źródła i va = vs.
- Odstęp prądu zerowego (β ≤ ωt ≤ π + α), gdy Ia = 0 i Va = E.
Funkcjonowanie czytelnika jest opisane przez następujące równania: 
Rozwiązanie równania. (5.72) ma dwa składniki, jeden ze względu na źródło Ca (VM / Z) sin (ωt – φ) i inne z powodu emf ( – e / ra). Każdy z tych składników z kolei ma komponent przejściowy. Albo reprezentowane przez pojedynczego wystawcę K1E-T / τA, wtedy

Lub

i τa jest podawany przez równ. (5.25).
Stałą K1 można ocenić przez poddanie równania. (5.74) W stanie początkowym IA (α) = 0. Wymień wartość K1 uzyskana w ten sposób w równaniu. (5.74) Rended

Ponieważ IA (β) = 0, równania. (5.77)

β można ocenić za pomocą iteracyjnego roztworu równania. (5.78).
Ponieważ spadek napięcia przez indukcyjność zbrojenia z powodu komponentu CC prądu zbrojenia wynosi zero
![]()
Gdzie są, a składniki prądu stałego napięcia i prądu zbrojenia są odpowiednio. Na rysunku 5.26 (6)
Prąd wzmacniający składa się z komponentu DC i Harmonicznych. Gdy przepływ jest stały, tylko komponent CC wytwarza regularny moment obrotowy. Harmoniczne wytwarzają alternatywne elementy momentu obrotowego, których średnia wartość wynosi zero. Dlatego moment obrotowy silnika jest zawsze podawany przez równanie. (5.7). Równania. (5.7), (5.8), (5.79) i (5.80)

Przedstawiono granicę między ciągłym i nieciągłym przewodnictwem, gdy β = π + α. Podstawienie β = π + α w równaniu. (5.78) podaje wartość krytyczną prędkości ωMC, która oddziela ciągłe przewodzenie od nieciągłego przewodnictwa dla danego α jako

Ciągłe przewodzenie:
Na rysunku 5.26 (c)

Równania. (5.7), (5.8), (5.79) i

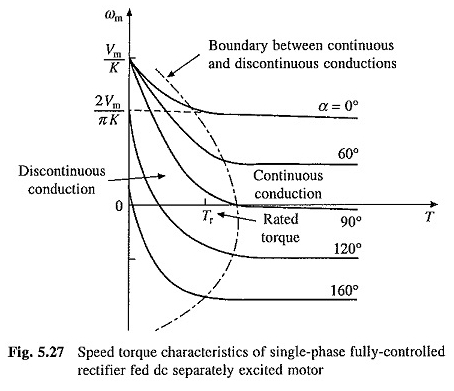
Krzywe momentu obrotowego prędkości dla czytnika przedstawiono na rysunku 5.27. Idealna operacja bez obciążenia jest uzyskiwana, gdy Ia = 0. Gdy dwie pary tyrystora (T1, T3) i (T2, T4) nie zarządzają, IA wyniesie zero. Stanie się to, gdy E> vs przez cały okres, dla którego obecne są zmęczone impulsy.
Dlatego, gdy α <π / 2, e musi być większe lub równe VM, a gdy α> π / 2, e powinien być większy lub równy VM sin ωt. Dlatego nie podano prędkości obciążenia

Maksymalne średnie napięcie zaciskowe (2VM / π) jest wybierane równe nominalnemu napięciu silnika. Idealny brak prędkości obciążenia silnika, gdy jest zasilany idealnym bezpośrednim napięciem wartości nominalnej, będzie wtedy (2VM / πk).
Warto zauważyć, że maksymalna prędkość bez obciążenia z kontrolą prostownika wynosi (π / 2) razy ta wartość. Przedstawianie ciągłego i nieciągłego przewodnictwa jest reprezentowana przez linię kropkowaną (ryc. 5.27).
W przypadku par mniejszych niż oceniono, niski dysk działa głównie w nieciągłym przewodzeniu. Podczas ciągłego przewodnictwa równoległe linie proste są liniami równoległymi, których nachylenie, zgodnie z (5.84), zależy od rezystancji obwodu zbrojenia RA.
Efektem nieciągłego przewodnictwa jest uczynienie regulacji słabej prędkości. Zachowanie to można wyjaśnić z fali z ryc. 5.26 (b) i (c). Podczas ciągłego przewodnictwa, dla danego α, każdy wzrost momentu obrotowego zrzuca ωm i E, aby AI i T mogły wzrosnąć.
Średnie napięcie zaciskowe pozostanie stałe. W nieciągłym przewodniku każdy wzrost pary i wzrost w towarzystwie AI prowadzą do wzrostu β i spadku AV. Dlatego prędkość spada o większą ilość.
Czytnik działa w kwadrantach I (Automobile do przodu) i IV (wsteczne hamowanie regeneracyjne). Operacje te można wyjaśnić w następujący sposób:
Równania. (5.84), zgodnie z hipotezą ciągłego przewodzenia, napięcie wyjściowe CC prostownika zmienia się w zależności od α, jak pokazano na rysunku 5.28 (a). Kiedy pracujesz w kwadrancie I, ωm jest dodatni, a α ≤ 90 °; A polaryzacje VA i E przedstawiono na rysunku 5.28 (b).
W przypadku pozytywnej sztucznej inteligencji prowadzi to prostownik do zapewnienia energii i zużywającego ją silnik, dając w ten sposób samochód do przodu. Polaryzacje E, AI i Auts for Funkcjonowanie kwadrantu IV przedstawiono na rysunku 5.28 (c). E odwrócił się z powodu odwrócenia ωm.
Ponieważ AI jest zawsze w tym samym kierunku, maszyna działa jako generator wytwarzający moment obrotowy hamowania. Ponadto ze względu na α> 90 °, VA jest ujemny, co sugeruje, że prostownik przyjmuje teraz moc zacisków CC i przenosi ją do sektora prądu przemiennego.
Ta operacja prostownika nazywa się odwróceniem, a prostownik działałby jako falownik. Ponieważ generowane dostawy jest dostarczane u źródła tej operacji, jest to hamowanie regeneracyjne.

Dwie pojemność roboczą kwadrantu czytnika można użyć tylko z ładunkami wersji lub innymi aktywnymi ładunkami, które mogą napędzać silnik w przeciwnym kierunku.
W normalnym działaniu z dwoma kwadrantami silnika potrzebny jest bezpośredni uchwyt (kwadrant I) i przednie hamowanie (kwadrant II), którego czytnik nie może dostarczyć na rysunku 5.26 (a).