Características dos motores CC | Características do motor de derivação:
A potência do mecanismo CC está em sua versatilidade e facilidade com que uma variedade de características de plotagem de velocidade pode ser obtida, e a ampla gama de controle de velocidade que é possível sem a necessidade de elaborados diagramas de controle, enquanto um alto nível de eficiência operacional é mantido.
Em um gerador de velocidade, a velocidade é fixada pelo mecanismo de primeira taxa e permanece quase constante em toda a parte operacional das características dos motores de corrente contínua, enquanto as condições do campo são ajustadas para fornecer a tensão do terminal desejada a uma determinada carga.
Em um motor, por outro lado, a necessidade é corresponder às características de velocidade dos motores de corrente contínua da carga e executar a carga a uma velocidade ou velocidade especificada pelo ajuste do campo e pelo ajuste da tensão de reforço, caso seja desejado um controle de velocidade em um intervalo amplo. As relações fundamentais da EMF e as equações são reproduzidas abaixo:  Na operação automotiva, é prático expressar essas relações na forma de velocidade e torque do reforço, ou seja,
Na operação automotiva, é prático expressar essas relações na forma de velocidade e torque do reforço, ou seja,  Observa -se que o EA é governado pela equação do circuito -quadro
Observa -se que o EA é governado pela equação do circuito -quadro ![]() e o fluxo / pólo φ é determinado pela excitação equivalente
e o fluxo / pólo φ é determinado pela excitação equivalente  E a característica da magnetização da máquina com a previsão de que a reação incomum causará uma redução no fluxo / pólo. Os motores DC são de três tipos de acordo com a maneira como estes são excitados. Em um motor, a emoção de derivação não depende do FME induzida pelo interior e é governada independentemente pela tensão de oferta.
E a característica da magnetização da máquina com a previsão de que a reação incomum causará uma redução no fluxo / pólo. Os motores DC são de três tipos de acordo com a maneira como estes são excitados. Em um motor, a emoção de derivação não depende do FME induzida pelo interior e é governada independentemente pela tensão de oferta.

Nesse sentido, a emoção da derivação do mecanismo se comporta mais como uma emoção separada e não como auto-excitação como em um gerador de derivação excitado.
Características do motor de derivação:
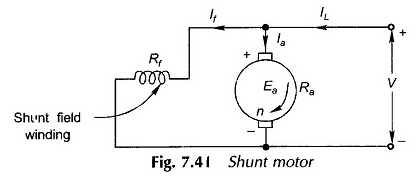
A Figura 7.41 mostra o diagrama de conexão de um motor de derivação. Sua operação com uma tensão de terminal fixa e uma resistência de campo fixo, ou seja, com uma corrente de campo de derivação constante, agora será previsto. No circuito incomum ea = v – Lara (7,52) que, durante a substituição na Eq. (7.48) dá 
 As equações (7.53) e (7.54) dão a variação na velocidade do motor com a corrente de reforço e com o torque como um rastreado nas Figs. 7.42 (a) e (b). Essas características também podem ser extraídas da corrente da linha simplesmente adicionando a corrente de campo (IL = IA + se). Resulta da equação. (7.53) Essa velocidade cairá devido à queda da resistência ao reforço de IARA, mas é combatida por uma diminuição de φ causada pela reação do quadro.
As equações (7.53) e (7.54) dão a variação na velocidade do motor com a corrente de reforço e com o torque como um rastreado nas Figs. 7.42 (a) e (b). Essas características também podem ser extraídas da corrente da linha simplesmente adicionando a corrente de campo (IL = IA + se). Resulta da equação. (7.53) Essa velocidade cairá devido à queda da resistência ao reforço de IARA, mas é combatida por uma diminuição de φ causada pela reação do quadro.

Como o efeito da IARA predomina, a velocidade cai um pouco com a carga, como mostrado na Figura 7.42 (a). De acordo com a equação. (7.54), mas para o efeito desmagnetizante da corrente de reforço, a característica T -A estaria ligeiramente inclinada. A característica real do torque é um pouco mais alta e dobra para dentro devido à redução no fluxo / pólo, como mostrado na Figura 7.42 (a). Eliminando a IA entre as equações (7,53) e (7,54) a característica de aceleração  Que seria uma linha reta, mas para a redução de φ causada pela reação do quadro. A característica real é desenhada na Figura 7.42 (b). A velocidade cai
Que seria uma linha reta, mas para a redução de φ causada pela reação do quadro. A característica real é desenhada na Figura 7.42 (b). A velocidade cai 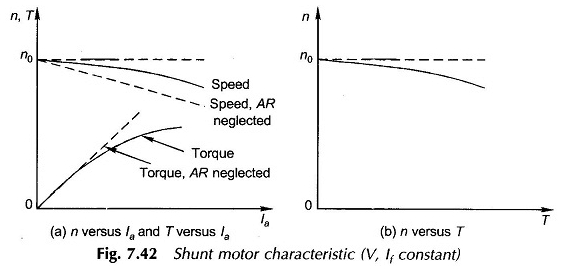 sem carregar a carga total de alguns por cento; De fato, a velocidade permanece significativamente constante. Essa característica é conhecida como a característica do “shunt”. Uma classe importante da máquina CA, chamada motor de indução, também possui uma característica semelhante (NT).
sem carregar a carga total de alguns por cento; De fato, a velocidade permanece significativamente constante. Essa característica é conhecida como a característica do “shunt”. Uma classe importante da máquina CA, chamada motor de indução, também possui uma característica semelhante (NT).