Controlador de tambor para o motor da série DC:
Os motores da série DC são frequentemente usados em guindastes, elevadores, bondes e outras aplicações, onde o motor está sob o controle direto de um operador. Nessas aplicações, podem ser necessárias variações frequentes de início, velocidade, parada e inversão.
Um controlador explorado manualmente, mais robusto que um reostato inicial, chamado controlador de bateria, é empregado.
O controlador de tambor está na forma de um tambor rotativo com segmentos que entram em contato com os pontos fixos. O controlador de velocidade desse tipo é ilustrado na FIG.

1.62 em que K é uma bobina de frenagem de arco: EM é um eletromato de frenagem; O FLS é um interruptor de rotação em uma direção e o RLS é um interruptor para rotação na direção oposta. O controlador de tambor tem seis posições para a frente e seis posições para a rotação oposta do motor.
As posições de trabalho do controlador são representadas por linhas pontiagudas verticais. O Electro-Lovy EM é conectado em paralelo ao motor e libera o motor na inicialização. Quando o motor está desconectado, está travado mecanicamente.

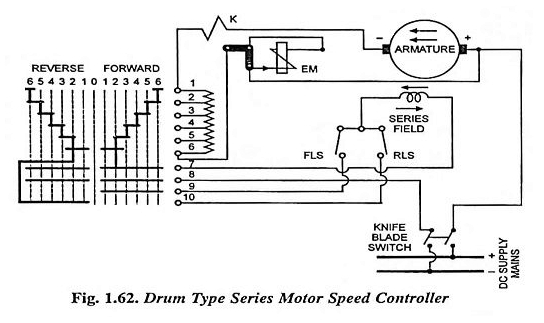

Agora, quando o interruptor da lâmina da faca é fechado e o controlador é colocado na posição 1 frontal, as conexões estão ao longo da linha vertical. Nesta posição, os segmentos estabelecem contatos com pontos fixos 6 e 7, 8 e 9.
Nesta posição, a corrente circula da barra de barramento + ve o enrolamento no reforço do motor, a bobina de frenagem Arc K, toda a start-up 1-6, os pontos fixos 6 e 7 por meio de segmentos do controlador, o enrolamento de campo da série, o interruptor do limite frontal, os pontos fixos 9 e 8 através dos segmentos do controlador e retornam à barra de barramento negativo.
Na segunda posição adiante, os segmentos do controlador de bateria entram em contato com os pontos fixos 5 e 6, o que coloca uma parte da resistência inicial do circuito, para que a velocidade do motor da série aumente.
Nas posições de transferência a seguir, 3ª, 4ª e 5ª, etapas adicionais nos resistores de partida saíram do circuito e, finalmente, na 6ª posição, todas as resistências de partida são curtas e o motor atinge uma velocidade máxima.
Nas seis posições adiante, a direção da corrente em reforço e no enrolamento do campo em série é a mesma (da direita para a esquerda), como mostra a Figura 1.62.
Mas, na posição oposta, a corrente circula da barra de barramento + ve, enrolando o reforço, a bobina de frenagem do arco K, todas as resistências iniciais 1-6, os pontos fixos 6 e 10 através dos segmentos do controlador, o interruptor de limite de campo do RLS, o barramento de campo da série.
Consequentemente, é óbvio que nas posições de inversão, a direção do fluxo de corrente no enrolamento do reforço permanece inalterada, enquanto o oposto pelo enrolamento do campo da série, revertendo assim a rotação do motor.