Controle de velocidade no loop de motor CC fechado:
O controle do loop fechado do motor CC – conversores (retificadores e helicópteros) são construídos usando dispositivos semicondutores, que têm uma capacidade térmica muito baixa. Portanto, suas correntes transitórias e estáveis são as mesmas.
Os motores CC podem transportar a corrente nominal 2 a 3,5 vezes durante operações de transição a curto prazo, como inicialização, frenagem e inversão. A corrente é alta, o torque é alto e a resposta de transição é maior.
Portanto, quando é necessária uma resposta rápida durante as operações de transição, a corrente do motor pode ter um valor máximo autorizado. A classificação do conversor é então escolhida igual ao valor máximo autorizado da corrente do motor.
Devido à notação atual significativa, o custo do conversor será agora maior. Quando a resposta rápida de transição não é necessária, a nota atual do conversor é escolhida para ser igual à costa atual do motor, a fim de manter o custo do conversor baixo.
Os discos de loop aberto são fornecidos com um controle de limite atual e para proteger o conversor das sobrecargas atuais.
O controle da velocidade de loop fechado dos diagramas do motor CC é fornecido com um loop de controle de corrente interno para limitar a corrente dentro de um limite de segurança e também acelerar e desacelerar o leitor no máximo autorizado e em torque durante as operações de transição.

No entanto, deve -se notar que a desaceleração no torque atual ou máximo será possível quando o conversor usado também tiver a capacidade de operações de frenagem.
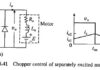
Também se pode notar que o retificador controlado será usado quando a fonte for CA e o helicóptero será usado quando a fonte de alimentação for CC.
A abordagem básica para o controle da velocidade fechada abaixo e acima da velocidade é explicada pelo leitor na Figura 5.47. O leitor usa o loop de controle de corrente interno e o loop de velocidade externo.
Esse leitor operará em uma corrente de campo constante e uma tensão de interrupção variável abaixo da velocidade básica e a uma tensão de reforço constante e uma corrente de campo variável acima da velocidade básica. O reforço e o campo são, portanto, alimentados por retificadores totalmente controlados.
Como o reforço é alimentado por um retificador totalmente controlado, a frenagem dianteira não é possível; O leitor desacelerará devido apenas ao torque de carregamento. Devido ao controle da corrente interna com o limitador atual, a aceleração ocorrerá informada e com o torque máximo autorizado.
No conversor de semicondutores, o Fed leva ao controlador PI (proporcional e integral) é frequentemente usado porque filtra o ruído que, de outra forma, pode se tornar um problema. O controlador PI também fornece boa precisão ao estado de equilíbrio.

Vamos primeiro examinar a operação sob velocidade básica. No loop de controle de campo, o EMF E é comparado a uma tensão de referência E * que é escolhida entre 0,85 e 0,95 da tensão de reforço nominal.
O valor mais alto é usado para motores de resistência ao circuito de baixo reforço. Para velocidades abaixo da velocidade básica, o controlador de campo de saturação devido a um grande valor de erro de EF. O ângulo do prêmio do retificador de campo αF é mantido em zero, aplicando tensão nominal no solo.
Isso garante a corrente de campo nominal para a operação do motor abaixo da velocidade básica (ωMB). Quando a referência de velocidade é aumentada de ω * m1 a ω * m2 (ω * m2 <ωm1) devido a um erro de alta velocidade, o limitador de corrente satura e define a referência atual ao valor máximo autorizado.
O leitor acelera o torque atual e o máximo disponível. Quando a velocidade chega perto de ω * m2, o limitador de corrente é detalhado e a direção é ajustada na velocidade ωm2 e a corrente que fornece um torque do motor igual ao torque de carga.
Se a referência de velocidade for reduzida para ω * m1, a referência atual será definida como zero e o leitor será desacelerado devido ao torque de carga.
Quando ωm se torna um pouco menor que ω * m1, a corrente do motor flui novamente e finalmente leva a regras na velocidade ωm1 e a corrente para a qual o torque do motor equilibra o torque de carga. Para um erro de velocidade negativa, I * A é definido em zero porque o I * A negativo é sem uso.
No entanto, ele cobrará o controlador PI. Quando a velocidade de referência aumenta novamente, o que aumenta o erro positivo, o controlador PI carregado leva mais tempo para responder, o que torna a resposta do transitório mais lento.
Agora permita que a operação seja examinada acima da velocidade básica. Perto da velocidade básica, o controlador de campo está saturado. Agora, se a velocidade de referência for definida para uma velocidade maior que a velocidade básica, a referência atual será definida pelo valor máximo autorizado.
O ângulo de tiro do retificador de reforço αA é reduzido para aumentar inicialmente. O motor acelera, a EF aumenta, a EF diminui, reduzindo a corrente do campo.
Assim, a velocidade do motor continua aumentando e a corrente de campo continua a diminuir até que a velocidade do motor se torne igual à velocidade de referência. Como o erro de velocidade agora será pequeno, retornará a um valor próximo ao valor original.
Assim, o controle de velocidade acima da velocidade básica é obtido pelo controle de campo com a tensão de reforço mantida perto do valor nominal. Na região de controle de campo (velocidade básica acima), o leitor reage muito lentamente devido ao grande valor da constante de tempo de campo.