CC CC Chopper Control separadamente:
Controle de automóveis: Um controle de helicóptero do transistor do motor CC, excitado separadamente, é ilustrado na Figura 5.41 (a). O transistor TR é operado periodicamente com o período T e permanece por uma tonelada de duração.
A eclosão atual opera em uma frequência alta o suficiente para garantir a condução contínua. As formas de onda da tensão do motor VA e a corrente de reforço da IA para condução contínua são representadas na Figura 5.41 (b). Durante o período no período do transistor, 0 ≤ t ≤ ton, a tensão do terminal do motor é V.


A operação é descrita por


Nesse intervalo, a corrente de reforço vai de IAL para IA2. Como o motor está conectado à fonte durante esse intervalo, ele é chamado de intervalo de serviço.

Em t = tom, TR está parado. Corrente do motor As rodas livres através do diodo DF e a tensão do terminal do motor são zero durante o intervalo ≤ t ≤ T. A operação do motor durante esse intervalo, conhecida como intervalo de roda livre, é descrita por

A corrente do motor diminui de IA2 para IA1 durante esse intervalo.
A tonelada de relatório de intervalo de função no período T -CHOPPER é chamada de relatório ou ciclo de serviço (Δ). Então

Na Figura 5.41 (b)

A equação (5.2) e (5.7) também são aplicáveis aqui

Equações. (5.7), (5.8). e (5.114)

A natureza da característica do torque de velocidade é representada na Figura 5.43.
Frenagem regenerativa:
O controle dos helicópteros do motor CC excitado separadamente para a operação da frenagem regenerativa é ilustrado na Figura 5.42 (a). O TR Transistor trabalha periodicamente com um período T e um período de tonelada.
As formas de onda da tensão do motor VA e a corrente de reforço da IA para condução contínua são representadas na Figura 5.42 (b). Geralmente, uma indutância externa é adicionada para aumentar o valor do. Quando o TR é iluminado, os aumentos de IA1 para IA2.
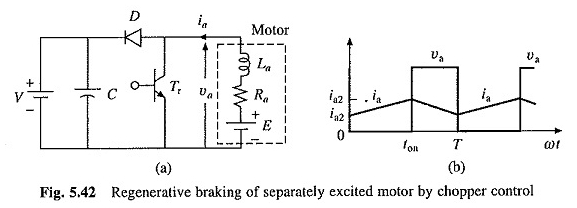
A energia mecânica convertida em eletricidade pelo motor, agora trabalhando como gerador, aumenta parcialmente a energia magnética armazenada na indutância do circuito de reforço e o restante é dissipado na resistência e transistor da estrutura.
Quando o TR é desativado, a corrente de reforço passa pelo diodo D e pela fonte V, e passa de IA2 para IA1. A energia eletromagnética armazenada e a energia fornecida pela máquina são fornecidas com a fonte.
O intervalo 0 ≤ t ≤ tom agora é chamado de intervalo de armazenamento de energia e intervalo de tonelada ≤ t ≤ t o intervalo de serviço. Se δ for novamente definido como o relatório do intervalo de serviço no período t, então

Na Figura 5.42 (b)

e Figura 5.42 (a)

Desde que o é revertido
![]()
Equações. (5.8), (5.118) e (5.119)

A natureza da característica do torque de velocidade é representada na Figura 5.43.

Máquina e frenagem regenerativa:
Circuitos de Hopper. 5.41 e 5.42 podem ser combinados para obter um helicóptero dois quadrantes na Figura 5.44, que podem fornecer operações de travagem de alça e regeneração na frente. O transistor TRL com o diodo D1 forma um circuito helicoputivo semelhante ao da FIG.
5.41 e, portanto, forneça controle para a operação dos automóveis diretos. O transistor TR2 com o diodo D2 forma um circuito helicoputivo semelhante ao da Figura 5.42 e, portanto, fornece um controle para uma operação de frenagem dianteira.
Assim, para a operação de direção, o transistor TRL é verificado e para a operação de frenagem, o transistor TR2 é controlado. A mudança no controle de TRL para TR2 vai da operação de automóvel para a frenagem e vice -versa.
Nos dispositivos de serviço em que a rápida transição do carro para a frenagem e vice -versa é necessária, TRL e TR2 são controlados simultaneamente. Em um período t, o TRL recebe uma unidade de porta de 0 a ΔT e TR2 recebe uma tração na porta de ΔT a T, onde δ é o relatório de serviço para TRL.
Consequentemente, do motor 0 a ΔT está conectado à fonte via TRL ou D2, dependendo se a corrente do motor da IA é positiva ou negativa. Desde esse período, durante esse período, a taxa de mudança atual é sempre positiva.
Da mesma forma, de ΔT a T, o reforço motor é curto-circuitado por D1 ou TR2, dependendo se a IA é positiva ou negativa e durante esse período, a taxa de mudança de corrente é sempre negativa. A tensão do terminal do motor e os onda de onda de corrente são representados na Figura 5.44 (b).
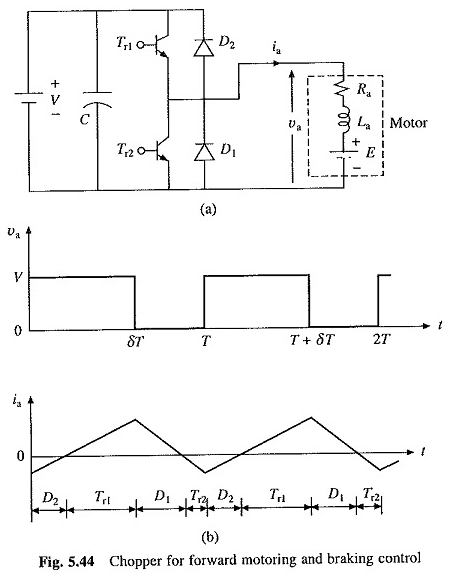
Na Figura 5.44 (b)

A equação acima sugere que a operação do motor (+ ve IA) ocorre quando Δ> (E / V) e a operação de frenagem regenerativa ocorre quando Δ <(e / v) e a transição automóvel para frenagem e vice -versa ocorre quando Δ = (e / v).
As equações acima são semelhantes às obtidas para o helicóptero na Fig. (5.41) e, portanto, levando em consideração os mesmos números
Frenagem dinâmica:
O circuito de frenagem dinâmico e seus ondas são representados na Figura 5.45. Durante o intervalo 0 ≤ t ≤ ton, a IA aumenta de IA1 para IA2. Parte da energia gerada é armazenada em indutância e o descanso é dissipado em RA e Tr. Durante o intervalo ton ≤ t ≤ t, as reduções de IA2 para IA2.
As energias geradas e armazenadas na indutância são dissipadas na resistência à frenagem RB, RA e Diodo D. O TR do transistor controla a amplitude da energia dissipada em RB e, portanto, controla seu valor efetivo.

Se a IA deve ser um DC sem ondulação, a energia consumida em RB durante um ciclo operacional dos helicópteros é
![]()
Energia média consumida por RB

Valor RB eficaz

Ou

A equação (5.122) mostra que o valor efetivo da resistência à frenagem pode ser alterado sem a etapa de 0 para RB, pois δ é controlado de 1 a 0. Quando a velocidade cai, δ pode ser aumentado sem a etapa para desacelerar o motor para um torque máximo constante, como mostrado na Figura 5.8 por linha a ser tomada por cadeia.